

[全般] カテゴリの記事
全2189件 (2189件中 51-100件目)
-
Maker Faire Tokyo 2023 出展許可でました。
先に書いた展示物で出展許可でました。くるくる変なドローン持っていきます。会場では飛ばせませんが。
2023.07.10
コメント(0)
-
Maker Faire Tokyo 2023 出展申し込み
本日までだったので出展申し込みしてみました。今回出すのは、マグヌス効果省電力ドローンと同僚のCuboRexのクローラユニットを使った白線引きロボット。審査通るかな?
2023.06.08
コメント(0)
-

蛍光スプレーについて
企業との共同案件で、目立つように蛍光色で塗ってほしいとの要望で、やってみたら意外と大変でした。まず、3Dプリンタで出力した物は、あちこち細かい隙間があって、スプレーで色を塗ったらその隙間から色が吸われてあちこち縦線が模様が入ってしまいました。なので、隙間を埋めるために以前ハンダごてで作ったへらで表面をならして隙間をなくす。フィラメントは黒だったのですが、蛍光スプレーを塗っても蛍光色になりません。赤黒い色になってしまいました。ベースは白じゃないとダメなようです。なので、白でスプレー、3度塗りしました。十分乾いてから、蛍光スプレー、これも2-3度塗りしました。蛍光スプレーを近場のホームセンターで購入したら値段は200㏄で約2000円。白の3ー4倍です。ちょっとずつ、薄いところを重ね塗り。とここまでやったらきれいなオレンジ蛍光色に仕上がりました。でも、購入した色はレッド、普段見てるオレンジっぽい色の表記がレッド、オレンジの蛍光はもっと黄色ががった色です。【あす楽対応・送料無料】アトムハウスペイント油性蛍光スプレー120MLレッド
2023.04.26
コメント(0)
-

AIに卓球してる女子を描かせてみた。
AIに卓球してる女子を描かせてみた。でも頑張ってこれ。AIは卓球という球技を理解できないらしい。赤いラバー貼ったラケット握ってるとか、球を見てるとか大きなテーブルとネットとか、いろいろキーワードを並べてみたけど、宙に浮いてる赤い球とか、ハンドボール大のピンポン玉とか描いてくる。
2023.04.20
コメント(0)
-

RaspberryPi PicoでLチカ
普段Windows使いでLinux使わないんでラズパイは興味なかったんですがこれは入手しました。RaspberryPi Picoはマイコンな感じなので入手してとりあえずLチカ。Thonnyというツールをインストールして、コンパイラをラズパイPicoに設定して、pythonで書いたサンプルを探して、ボードに書き込んでLEDが点滅しました。プログラムをPCに保存するか、ボードに保存するか、というボタンがでるので、ボードに保存したらパワーONで保存したプログラムが動くようになります。参考にしたサイトはこちらhttps://logikara.blog/raspi-pico-thonny-micropy/#mokuji_2Raspberry Pi Pico
2023.03.16
コメント(0)
-

業務用ハンダ
業務用ハンダが大量在庫されてたので一つ(1㎏)もらってきました。30㎝角位のハンダ槽用に購入されたもので30㎏在庫がありました。鉛入りハンダは最近貴重です。はんだごてで普通にはんだ付けするのには向きません。60Wのはんだごてを面に当てても溶けません。端に当てると溶けてくれます。切りくずが少々もったいないですが、使いやすいように3-4㎜の棒状にカット。くるくると巻いて保管しておきます。使うときは別にフラックスが必要です。ドローンの電源回りとか大量にはんだ盛るので、細いハンダをたくさん溶かすのはなんかもったいない気がして、この太いハンダがあれば一発ですね。白光 FS‐200 フラックス FS20001 [367-8806] 【ハンダ用品】[FS200-01]
2023.03.13
コメント(1)
-
DIPS2.0 で補正指示
DIPS2.0で補正指示が来た。マニュアルと入力で、飛行時間が違ってるところがあって、修正したつもりなんだけど申請書作成のところで一回消して、また登録しなおさないと反映されないようだ。最後に全体確認して出さないと、軽微なミスの修正繰り返しになってしまう。
2023.03.09
コメント(0)
-
ドローン情報基盤システム2.0を試し中
通称 DIPS 2.0 を試してる.旧バージョンで機体登録まではしてたんだけど,法律変わってバージョンも上がって,そろそろ真面目に取り組まないと思って.これまでは,体育館内で作ったドローンの試験飛行,屋内だと飛行許可も登録もいらない.屋外だと無人航空機としていきなり面倒になるので6月に機体登録だけして屋外では飛ばしてなかったんだけど,年度末だしそろそろ屋外で試験飛行してデータ取らないと,と思って飛行許可申請をやろうとした.まず,機体の所有者は厳密には所属組織なので,そちらで登録するとのことで当時必要だった情報を一通りそろえて登録をしてもらった.これもまあ大変だったんだけど.今回飛行許可は自分でアカウントを作ってそこでやろうとしたら,機体の所有者が違うのでもちろんでてこない.組織の方で,情報の参照を許可しないといけないらしい.組織の事務方に頼んで,アカウントでログイン,参照をきょかしてもらった.すると,自分のアカウントから機体が見えた.しかし,飛行許可申請しようとすると,機体と操縦者の登録が必要,機体が選べないのでいろいろ見たら,機体の情報が足りないとのこと,写真とか仕様とか取扱説明書が必要で,6月の機体登録の時点では要らなかった情報.そこで,機体の情報の追加を無難な自作機を1機だけやってみた.取扱説明書を作って仕様も決めて情報追加したら無事できた.操縦者の情報も,操縦の時間がこれまで何時間とか細かく入れないといけない.20数年前から数えてないから適当に(妥当な時間を)入れるしかない.毎日飛ばして夜もシミュレーターで遊んでた時期があるので積算すると膨大な時間.いろいろ調べてたが,人口密集地にかかってる学校のグラウンドも,30m以内の係留で飛ばせば,飛行許可は要らない,追加の情報を入力する必要もないかも(システム上求められていない).人口密集地外なら機体登録さえしてればOK.リモートID搭載は免除なのでこれも積載不要.せっかくリモートIDを購入したけど,まだ出番がない.新しく,未登録の機体を製作したら機体登録とリモートIDが必要.機体構想はあるので,時間が出来たら取り掛かろう.リモートIDを2個購入したから,あと2台は作れるかな.今年製作したVTOLは屋外で細かな調整が必要なので,できれば学校のグラウンドで飛ばしたいので飛行許可を申請してみる.VTOLだとやり取りが必要になりそうなので,取りあえず,回転翼機とVTOLは別々に登録.
2023.01.27
コメント(0)
-

RunCam 2 4K Version
カメラを入手してテスト中.マニュアル https://runcam.com/download/runcam2-4k/RC2_4K_MANUAL_EN.pdf アプリのリンク https://runcam.com/download/runcam24k 4Kカメラですが,静止画撮影の解像度は記載なし(静止画撮影後プロパティみると3840x2160). Wifiモードにして接続すると見通しで20mくらいは届きそう. osmo pocketよりは届く印象. スマホアプリで,画角,解像度などを設定できる.画角が広いということはゆがみあり. インターバル撮影は無い. PCに接続してもWebカメラにはならない. USB4本の端子は, 電源,GND,ビデオ信号(アナログテレビ相当FPV用),コントロール端子(サーボ信号につなげて動画撮影のON-OFFできる)osmoPocketとの比較は, 利点:より軽量,Wifi標準装備(接続可能距離が若干勝る),RC信号で動画撮影ON-OFFコントロール可能 欠点:静止画解像度(3840x2160)がDJIより悪い,インターバル撮影できない,ジンバル無しRunCam2 4K FPVスポーツアクションカメラ49g WiFi対応Ultra HD MP4ビデオカメラ調整可能なFOV、オレンジ
2023.01.27
コメント(0)
-
リモートID購入
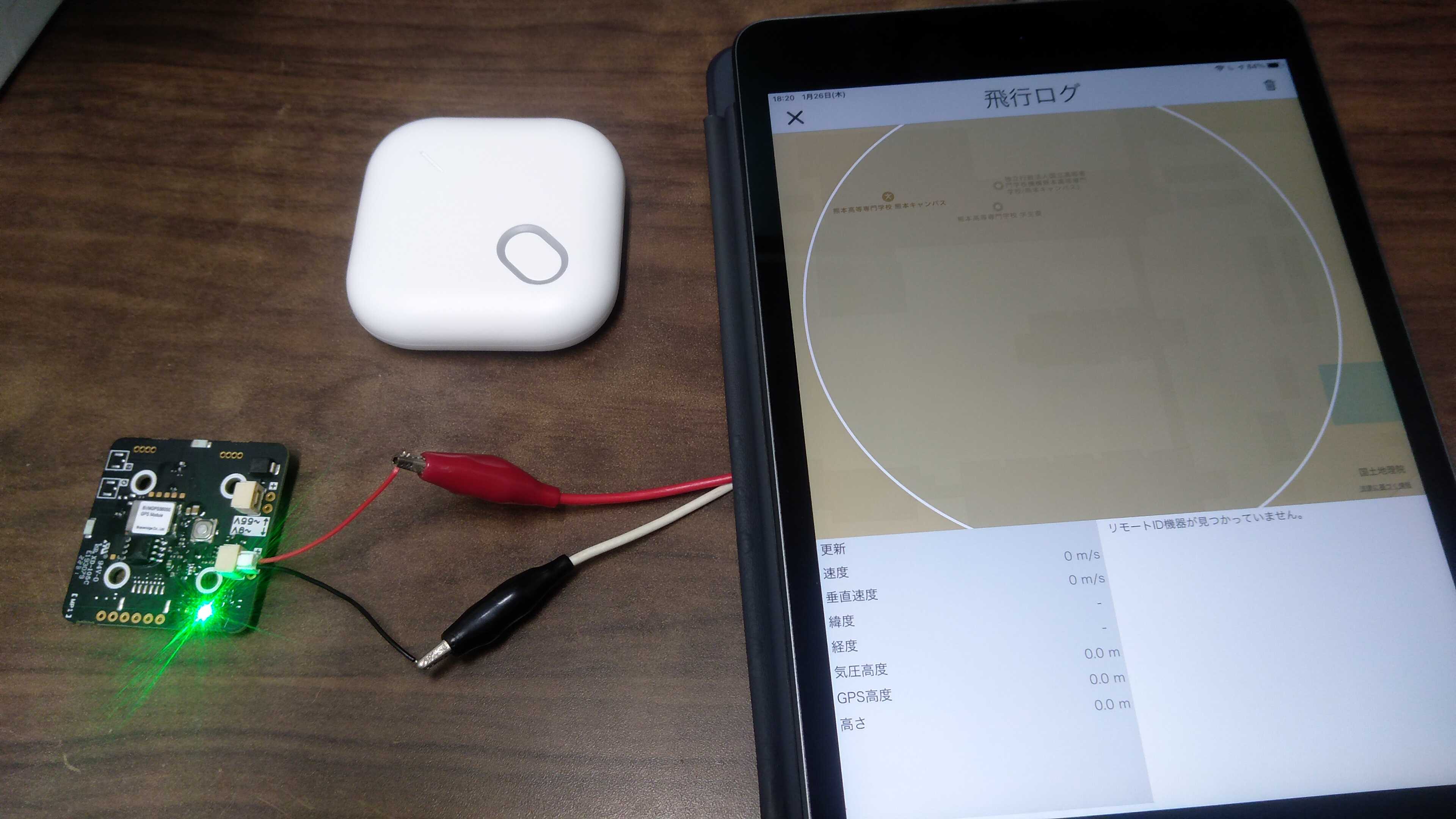
リモートIDを購入しました.製品は以下のページの物です.リモートID|製品情報|株式会社Braveridge標準サイズとminiがあるけど,miniは未発売なので標準サイズの大きい方.電源は電圧によって別に2端子あります.とりあえず5Vで使える方の端子で接続.リモートIDはBluetooth® 5.0 LongRange を使ってるらしく,普通のスマホでは受信できません.なので,リモートID受信機も購入.まずは,ipadminiにアプリをインストール.リモートIDの設定はipadで直接できるらしく,接続はできてシリアル番号までは読めたけど,その後は国交省のサイトとリンクしてリモートIDを書き込まないといけないらしい.そっちの方は事務的にまだ問題があってできないのでパス.(機体は学校所有で機体登録も事務方のアカウントでやってて自分じゃできない)リモートID受信機をipadminiに接続してみた.すると,リモートIDを探しに行くけど,リモートIDを書き込んでないので隣にあるのに見つけられない.というところまでやった.
2023.01.27
コメント(0)
-
電圧電流モニタの不具合がたぶん解消.
電流アンプ(ACHS-7124)のフィルタのキャパシタ追加しました.0.001uFに並列に.1uFを半田付け.クワッドコプタを浮かない程度で安定化電源で5A電流でプロペラ回してログを取った結果.ノイズが格段に小さくなってます.本来はパルス状の電流だろうからこれでOKとします.
2023.01.16
コメント(0)
-
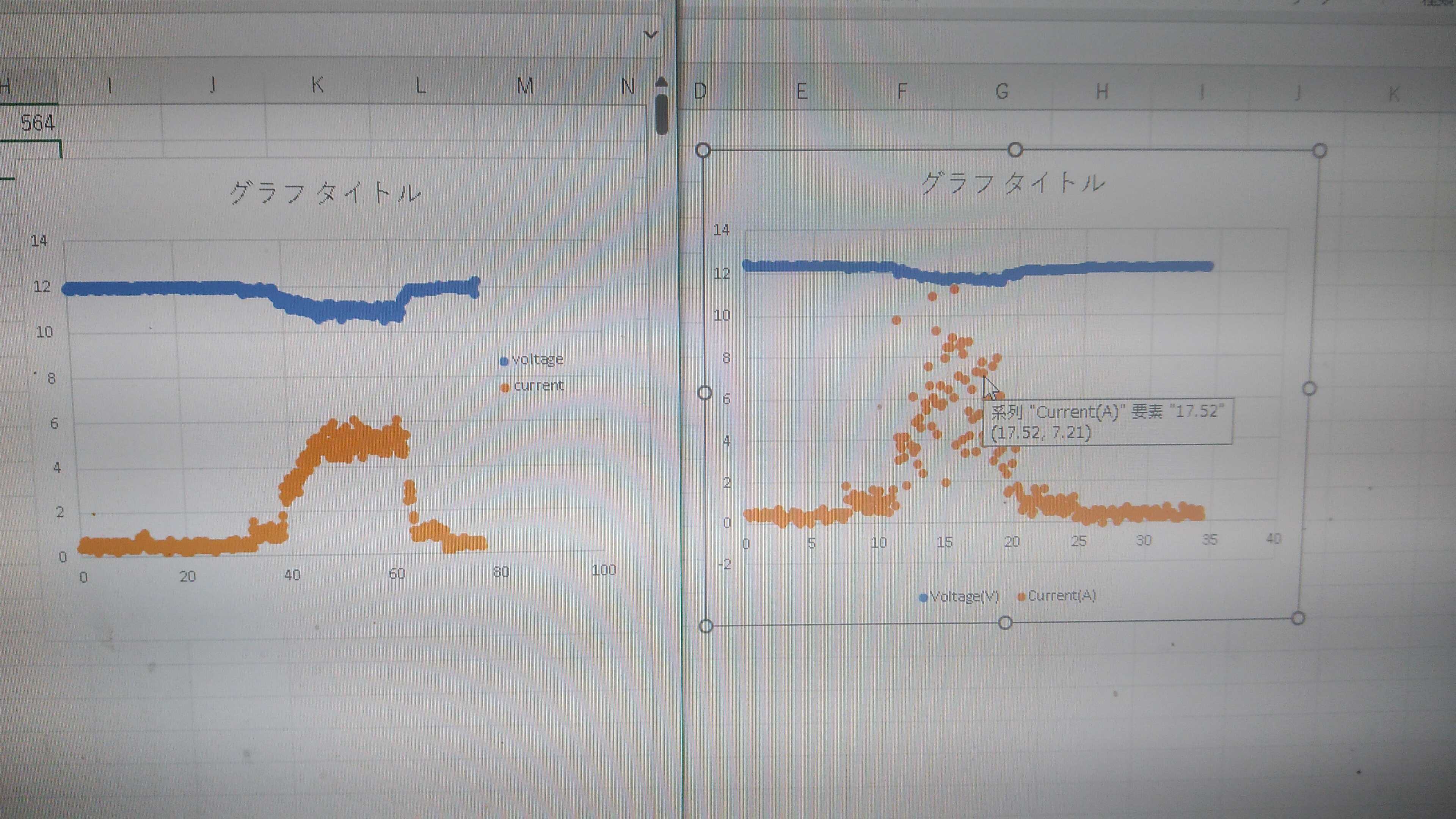
電流電圧ロガーのデータが困った状態.
実際にドローンに乗せて飛ばしてみたらふぐあいありです.下の写真の左が,浮かせずに12V5A程度でプロペラを回した状態で,これはノイズが多いですが妥当なデータになってます.ところが飛ばしてみたら写真の右のようなデータになりました.明らかにデータがブレすぎです.原因は何かと考えると,電源電圧は問題なくとれてるようなので,マイコンと電源は問題なさそう.電流センサの定格5VのところをSDカードの電圧に合わせて3.3Vで使っててそのせいかともおもったのですが飛んでる時に電圧が落ちてるわけでもないし.もしかしたら,電流センサがホール素子でレスポンスが早すぎるのかもしれません.ESCはトランジスタ のON-OFFでモータのコイルを切り替えながら電流を流してて結構大電流なのでサンプリングのタイミング次第で流れてる時と流れてない時の差が大きくなってるのかもしれません.センサのフィルタ回路を外付けのキャパシタで調整できるようなので,次はキャパシタの値を変えて様子を見てみます.
2023.01.14
コメント(0)
-
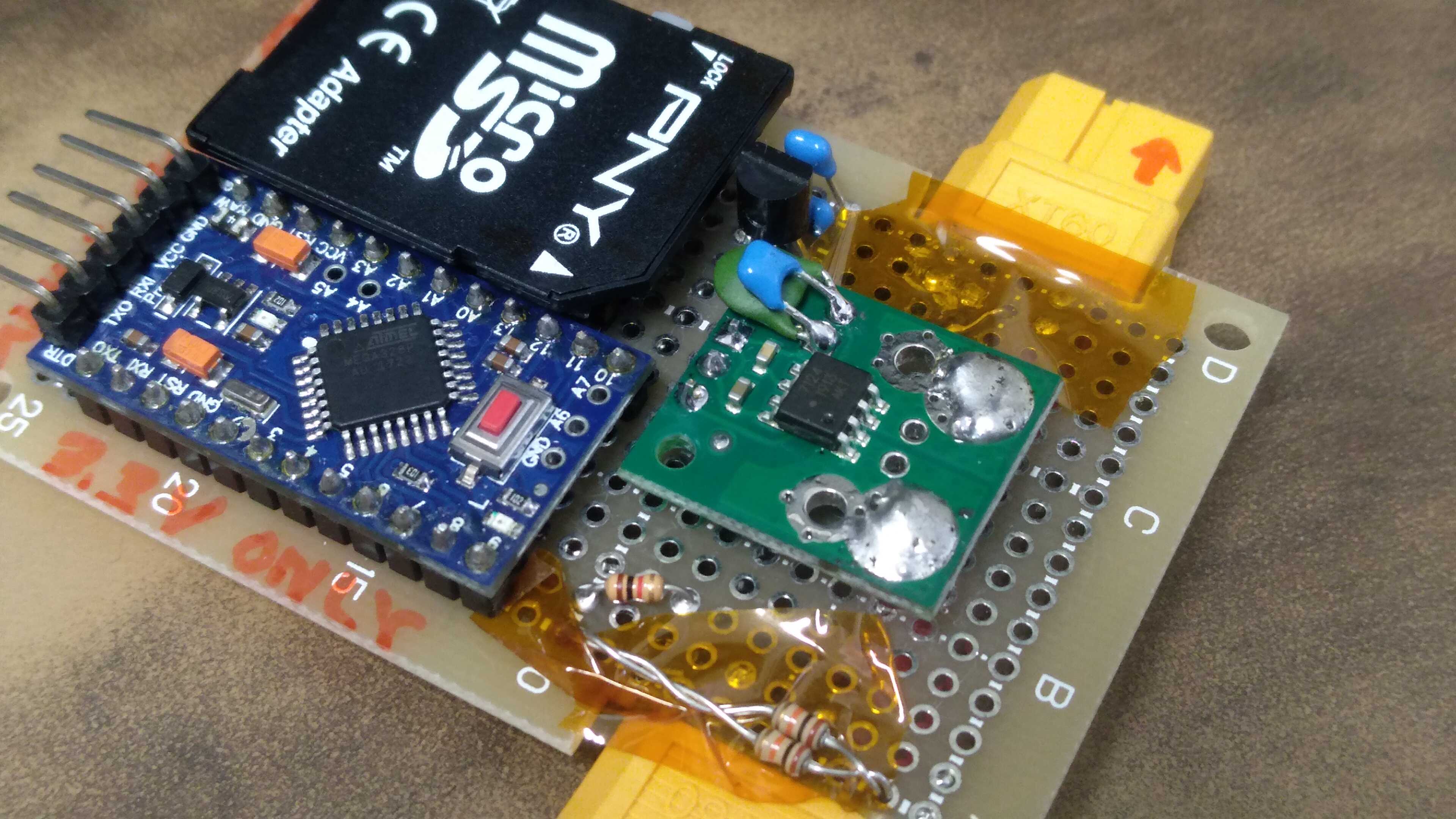
ドローンの電流電圧ロガー
CC3Dを使ってドローンを飛ばしてると電圧電流のログ機能がないのでロガーを作りました.仕様は以下の通り,作って忘れないうちにメモ. 開始からの秒数,電圧,電流の順でログを取る.ログは,約10回/秒. ・電圧値は5kと1kの抵抗の直列で分圧して1kの所で取る.入力電圧の6分の1を3.3Vを1023とした値で主力. 読んだ値*3.3/1023*6=読んだ値*0.0193 が電圧値 ・電流値は512を中心としてプラスの電圧で1Aで約10プラスの値.±40A程度測れる. (読んだ値-512)/10位 が電流値.補正必要. ファイル名は,datalog+通し番号+.txt として,起動ごとに連番でつけるようになっている.255の次は0にもどる.
2023.01.12
コメント(0)
-

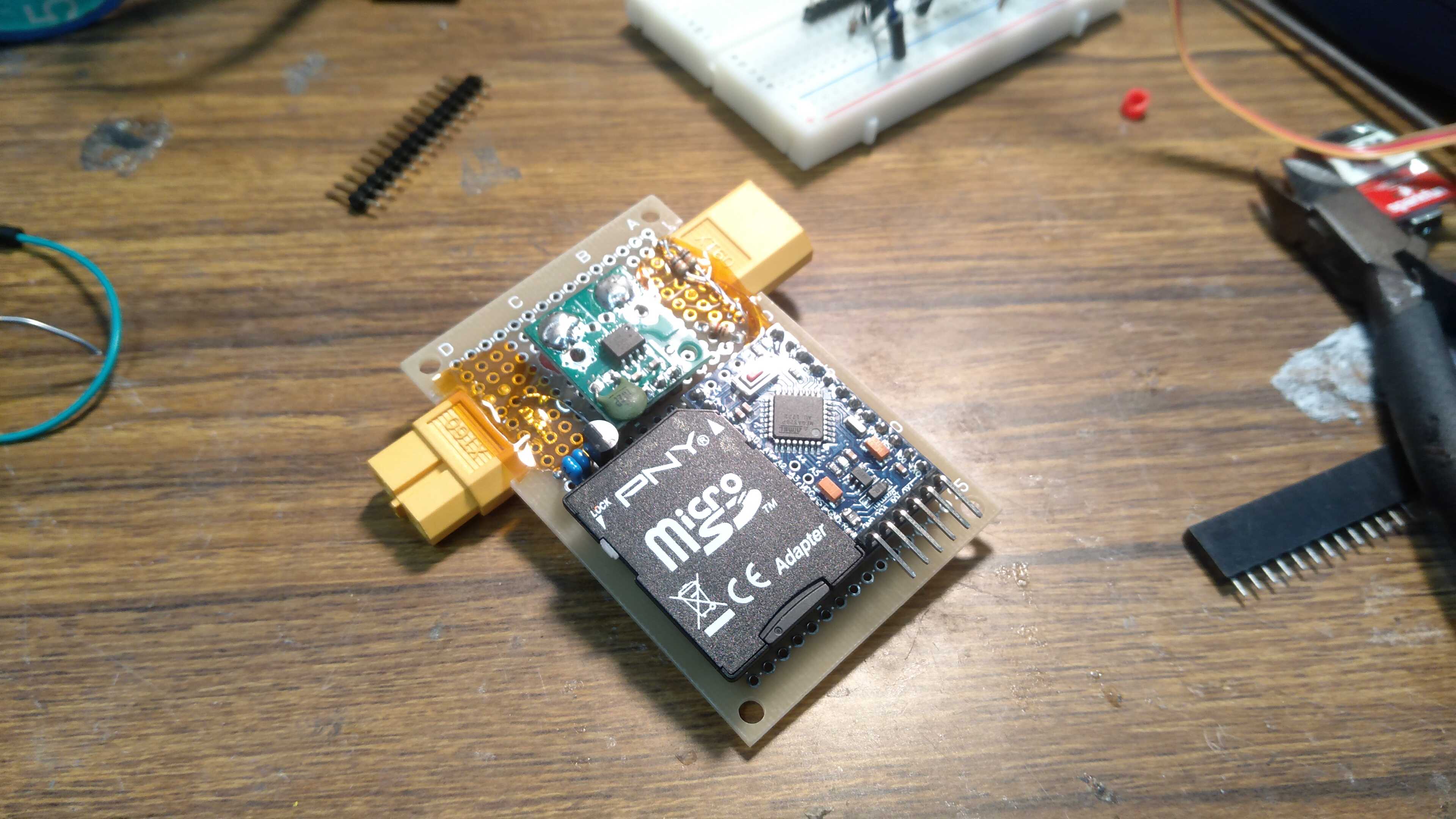
SDカードアダプタ分解
microSDカードを使うのにもう少しコンパクトにならないかと思って,SDカードアダプタを分解してみました.こんな感じで半分カットしてみて...内部で,3-6番はつながってることがわかりました.外部で配線する必要なかった.更に分解するとこんな感じ.半分にカットして使えないこともないけど,大して変わらないのでそのまま端子に半田付けして使った方が無難だと思いました.
2023.01.11
コメント(0)
-
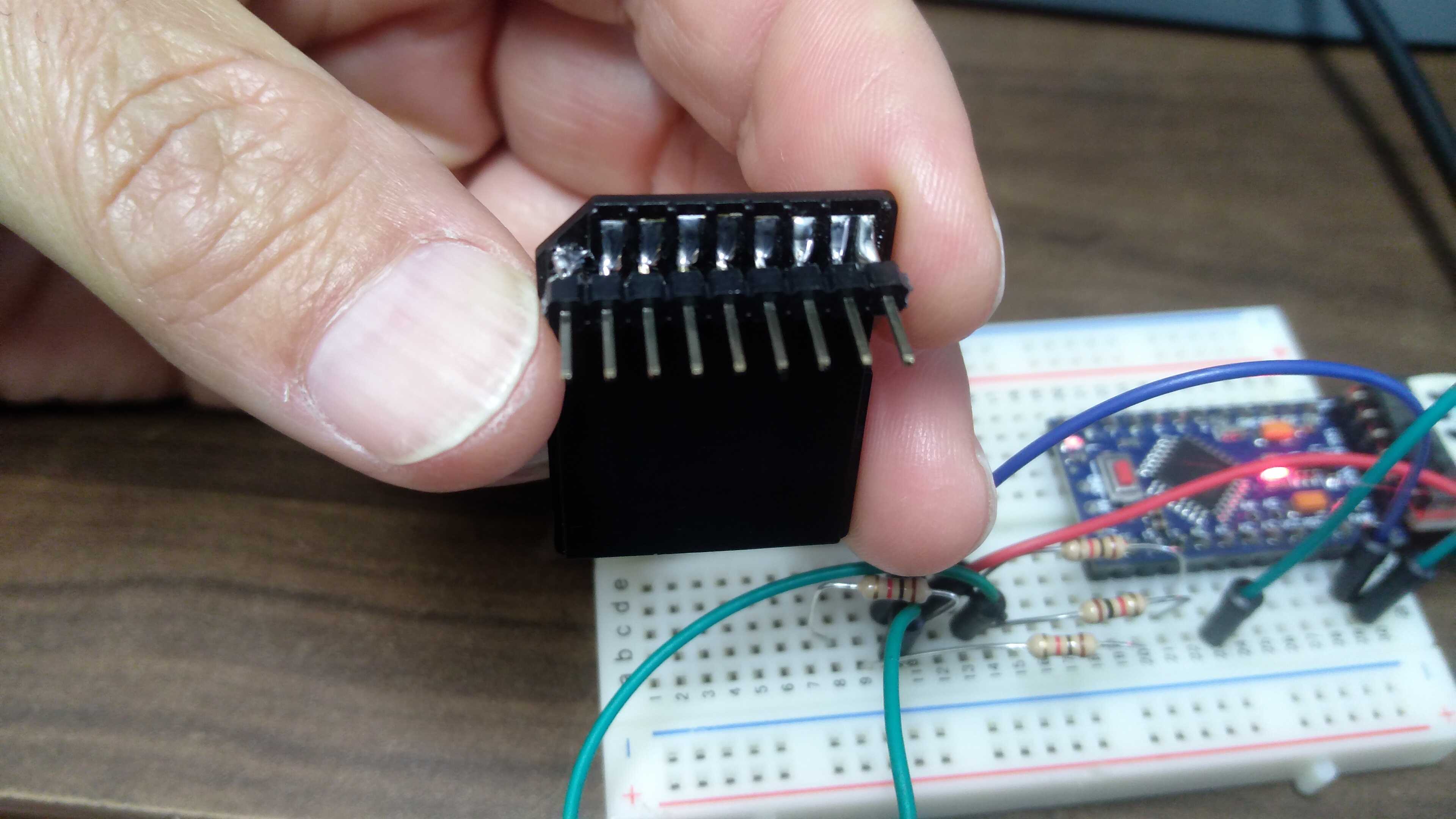
ArduinoでSDカードに記録するデータロガー
必要になったのでやってみました.ArduinoのサンプルにSDカードのDataloggerというのがあります.Arduinoのボードにプログラムを書込みだけなんですけど,回路はネットで検索しました.SDカードは,ノーマルサイズとマイクロサイズで配線が少し違うようです.参考にしたのは以下のサイト.Arduinoでパーツやセンサを使ってみよう~SDカード編(その1) | Device Plus - デバプラmicroSDカードスロットDIP化キットというのを使われてましたが持ってないので,SDカードアダプタを使いました.microSDカードを購入すると大抵ついてきます.ピンヘッダを半田付け.9端子をギリギリつけられるサイズでした.両端は使わないけどせっかくなので全ピン半田付けしました.写真を見て左から9,1,2,3,4,5,6,7,8番の並びらしいです.ArduinoはProMiniを使いました.書き込み時は,クロックは16MHz,電源5Vを選択.でもUSBシリアル変換はSDカードの電源電圧に合わせて3.3V仕様のものを使います.配線は,SD:4 ー> VCCSD:3,6 ー> GND (追記:3-6は内部でつながってるので外部配線は不要)SD:1 ー> GND(プルダウン)SD:2 ー> Arduino:11SD:5 ー> Arduino:13SD:7 ー> Arduino:12信号線には安全のため1kΩの抵抗を入れました.サンプルは,まず SDー> CardInfoを書込み.2GBのmicroSDカードを入れて実行すると以下の通り情報が読み出せます.次に,ArduinoにサンプルのDataloggerを書込み.実行すると,ランプがチカチカしてます.シリアルモニタで確認すると,アナログ入力A0,A1,A2の3本の値をコンマ区切りで出力してます.端子は開放状態なので値はバラバラ.しばらく待ってからVCCを外してmicroSDカードを取り出してPCで読み取ってみると,DATALOG.TXTというファイルがありました.開くとシリアルモニタに表示されたままの文字列が記録されてます.再度microSDカードを挿入して次はGND端子をA0に接続してみます.するとA0だけは値が0でその他はバラバラの値が出力されます.PCで確認すると,その前に記録されたDATALOG.TXTにログが追記されていました.プログラムを見たら読み取りと出力の文字列はFor文で回しながら作成し,毎回ファイルオープンして書込み,クローズしてるだけだったので,自分の好きなようにデータを書込みのは簡単なようです.
2023.01.10
コメント(0)
-
ブログタイトル戻しました
某親族にネット上に名前を出したら危険!っていわれて今さら危険もないですが面倒なので戻しました.これで特定は2km四方位の範囲に広がって難しくなったと思います...?
2022.12.24
コメント(0)
-
タイトル名変えました
youtubeと楽天ブログのタイトル名変えました.住所の地名から「おびやまロボット研究所」としたんですが,どこにあるのか?とか,知人に動画やブログ見てねって言っても見つけられないとかあるので,ベタに名前で「はやまロボット研究所」にしました.別に匿名じゃないんで.
2022.12.19
コメント(0)
-
開発履歴まとめてみた
研究室見学とか人が来るときに何をいつ頃作ったか自分でも分からなくなるので,主だったものとかちょっと特徴のある物を年代順にピックアップしてみた.2023 ○○〇傾斜○○○ローター垂直離着陸機(製作中)2022 ○○〇傾斜○○○ローター垂直離着陸機(非公開)2022 マグヌス効果を使った省電力ドローン(垂直軸風車付き省電力クワッドコプター)2022 傾斜トライローター付き全翼垂直離着陸機2022 傾斜クワッドローター付き全翼垂直離着陸機,大型機2021 傾斜クワッドローター付き全翼垂直離着陸機,小型試作機の飛行艇オプション2022 ラージボール用卓球ロボット2021 傾斜クワッドローター付き全翼垂直離着陸機,小型試作機2021 のり面点検装置,大型機2021 ティルトテールローターVTOL2021 DJI-N3を用いたクワッドコプター2021 カイトコントロールユニット,製作協力2021 橋梁下面検査用レールカメラ大型機試作2020 可変ピッチ翼付きクワッドHコプター2020 LTEボタン,LINE通知2020 wifiボタン,LINE通知2020 空中風力発電用可変カイト,改良版2020 橋梁下面検査用レールカメラ制御ソフト開発用卓上機2019 橋梁下面検査用レールカメラ小型機試作2019 教育用Arduinoロボトレーサ2019 空中風力発電用可変カイト2019 可変ピッチ翼付きトライコプター,エレボン追加機2019 カイト翼ティルトローター垂直離着陸機,尾翼追加改造2019 8x8LEDマトリクス電光掲示板,漢字バージョン2018 16ビットLEDバーサライト(フリフリLED)2018 8ビットLEDバーサライト(フリフリLED)2018 中学校連携センサボード用,湿度センサ2018 マイクロマウス,吸引機構2018 360度ケーブルカメラ,2機種2018 卓球の多球練習用の防球ネット2018 先尾翼チルトローターVTOL2018 カイト翼ティルトローター垂直離着陸機2017 自動開閉カイト翼付きトライコプター2017 可変ピッチ翼付きY6ヘキサコプター,大型機2017 可変ピッチ翼付きトライコプター,大型機2017 チルト二重反転ローター式VTOL2016 固定翼付きチルトテールローターVTOL2016 可変ピッチ翼付きトライコプター,小型機2016 ティルトローター付きトライコプター2016 AIミニ四駆2015 係留ライン有線制御クワッドコプター2015 固定翼付きクワッドコプター2015 竹スピーカー2015 竹コプター2015 マルチコプターの制御を学習する教材2014 トライコプターをベースにしたテールシッターVTOL2014 GPSロボットカー,mbed制御版2014 有線給電ドローン2014 エンジン+電動ハイブリッドヘプタコプター2014 エンジン+電動ハイブリッドクワッドコプター2014 mbed音声合成,音声変調,ボイスチェンジャー2014 自転式自律飛行体,気圧センサによる高度制御2014 固定翼ラジコン空撮機2014 RCグライダーのArduplane2013 センサステアリング方式のロボトレーサ試作2013 Arduinoによる4脚ロボット2013 教育用GPSロボットカーキット2013 Arducopterによるヘキサコプター2013 反射速度を計測機(LEDが光ってジャンプ)2013 中学校の理科の教材,センスボード本体2013 教育用mbedのロボトレーサー2013 空撮用トライコプター2013 全翼機Arduplane2013 ボール&ビーム制御実験装置2013 トライブレ―ドコプター2012 競技用DC4輪ロボトレーサ2012 スマートLCD,抵抗体で位置検出2012 ピンポン球ロボット,球体プリンタ2012 2重反転による球形飛行体2012 自作フライトコントローラによるクワッドコプター2012 FC未使用のトライコプター2012 自作フライトコントローラによるデルタ翼機2012 mbedマイクロマウス2011 LED digital clock,残像ディスプレイ2011 卓球マシン用の球送りマシン2011 DCロボトレーサ試作機2011 Solar boat2011 自転式の球形飛行体,自転制御開発2011 Android制御 R/C Car2011 FeliCaリーダー・ライタ2011 ArduinoでRFID2011 音声認識移動ロボット2011 V-USB HID Mouse,キーボード2011 さいもじ2011 2指またはアーム文字入力システム2010 8x8LED display attachment2010 ArduinoMicromouse2010 半導体カーブトレーサー2010 自作金属探知機2010 8x8 LED DISPLAY2010 AVR oscilloscope, 2ch, X-Y2010 H8マイクロマウス2010 GPSロボットカー,コンテスト用2009 DC4輪マイクロマウス2009 DC half size micromouse2009 つくばチャレンジ出走機2008 IJE Robocon 2008出走機2008 マイクロマウス大会の時間計測システムの自作2008 ステッパーマイクロマウス2008 二足歩行マイクロマウス2008 ハーフサイズマイクロマウス2007 作って学ぶCPU設計入門,出版2007 Verilogによる教育用8ビットCPU設計,16ビットCPU設計2007 AHDLによる教育用8ビットCPU設計,16ビットCPU設計2006 楽天ブログ開設2004 半導体デバイス工学,出版2002 K-COM v2 公開2001 KNCT-COM 公開,K-COM v1改称公開
2022.12.19
コメント(0)
-
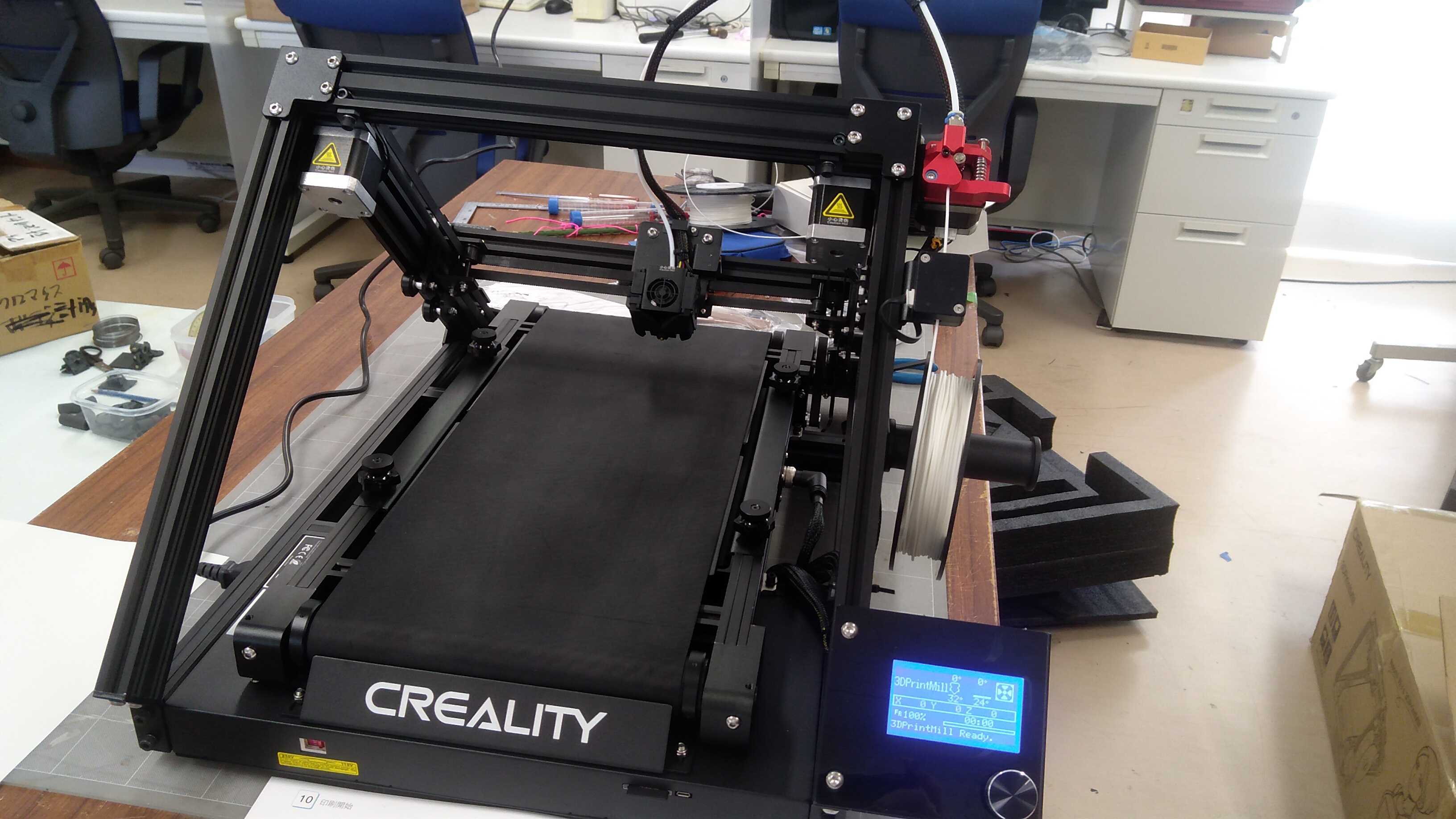
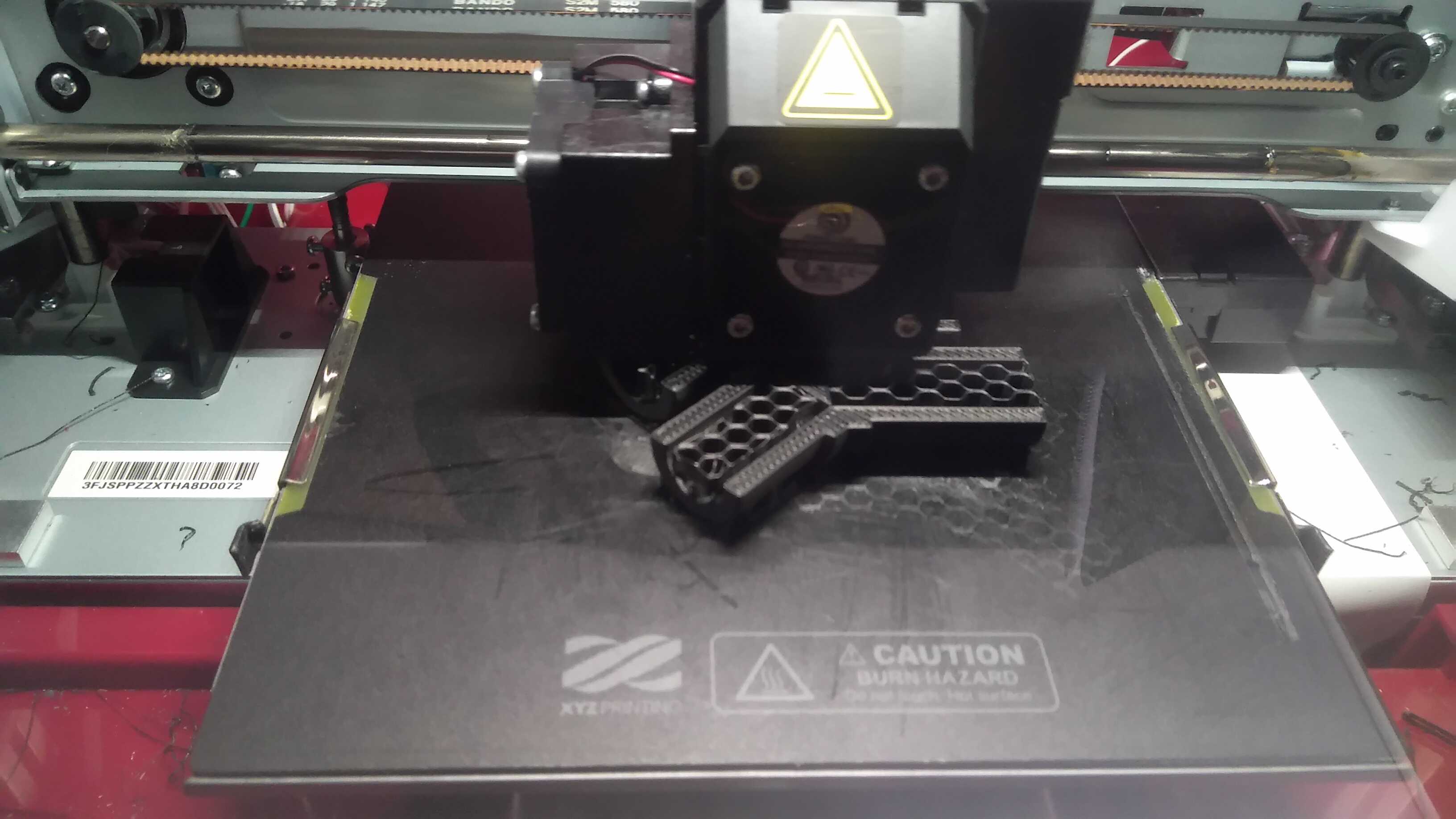
ベルト式3Dプリンタ,Creality 3D CR-30,感想,レビュー?
長尺の物が必要になって購入しました.ベルト式3Dプリンタ,Creality 3D CR-30です.ベルトで送れるのでZ方向が無限に出力できます.といっても作るものは30-50㎝くらいですが.取りあえずデフォルト設定で小さなものを出力してみます.付属のフィラメントですが結構失敗します.2回に1回は失敗.なので高さなど再調整して,ベルトにテープ貼ったりしてみました.ベルトとフィラメントの付きが悪く大問題です.一部にテープ貼ってスタートよくても後で剥がれたりとかします.全面にテープを貼ってみたら,ローラーの回転で剥げます.結構ベルトにテンションがかかってるので,伸び縮みのせいです.そりゃそうだ,って感じです.精度や仕上がりは良いです.なので大きな物の出力にはかなり時間がかかります.30cmくらいのものでも一晩では終わらないです.前日スタート一夜明けて朝に失敗してるとがっかりです.ベルトとの接着の問題なので,フィラメントをいろいろ変えて試してみました.xyzプリンティングのフィラメントが多種類あったので,いろいろ試すと,カーボンPLAがかなり付きが良いです.失敗の頻度が激減しました.高価なのが難点.でも,大きなものでもこの通り.出来上がったものにモータプロペラ等,メカ積みしてみました.良い感じです.3Dプリンター 正規品 世界初卓上無限Z軸プリント ベルトコンベア式 Creality社 CR-30 FDM 3D プリンター コスパ最強量産機 フルメタルボーデン式エクストルーダー 静音 フィラメントセンサー 停電自動復帰 高精度デュアルZ軸 低ノイズ 200x170x∞mm 3D Printer PLA/TPU/PETGカーボンPLAフィラメント ダヴィンチmini&Jr&super&color専用 XYZプリンティングジャパン 公式ストア メーカー保証 メーカーサポート RFCABXJP00B
2022.11.11
コメント(0)
-

芝刈りロボット導入
ある企業様の社会貢献活動として芝刈りロボットを学校に寄付して頂きました.早速試運転.地中に張ったワイヤーで境界を検知して範囲外に暴走しないように制御されています.充電が切れてきたら自動で充電ステーションへ.かなり昔からこの手の芝刈りロボットは商品化されているそうです.今風にAIで制御しなくてもランダムに刈り続ければ綺麗に整備されるそうです.【オートモア105】設置キット付き!ハスクバーナ ロボット芝刈り機(家庭用)販売終了ラスト2台!全自動芝刈り作業可能 芝刈り機、草刈機、草刈り機、不動産管理物件管理や果樹園下草刈り等、雑草刈にも最適。常時芝地や雑草地を綺麗な状態に保てます。
2022.11.03
コメント(0)
-

3Dプリンタのプレートの貼り替え
XYZプリンティングの ダヴィンチJr Pro Xを持ってるんですが,プレートの上のプラスチックのシートが傷んでしまったので貼り替えました.最初に,スクライバーで剥がすのは,結構強力に張り付いてるので大変でしたがまあできました.ところがその後に残った接着剤が大変.そのまま貼ると凸凹になりそうなので剥がそうと思って,最初パーツクリーナーをかけてみたけど全然ダメ.そこで有機溶剤を借りて来てふやかしながらそぎ落として,30分かかって接着剤を落としました.新しいシートを張るのは簡単.皺になったり空気が入ったりもなく綺麗に貼れました.トータルでは結構な作業でした.有機溶剤がないとどうにもなりません.お金ある人は素直にプレート買い直した方がいいです.XYZプリンティングジャパン ダヴィンチ Jr.ProXシリーズ専用プラットフォーム用プレート(RSJSPXY103F) 取り寄せ商品ポイント10倍 【公式ストア】 3Dプリンター ダヴィンチJr.ProX+ XYZプリンティング ABS対応 造形17.5cm角 オープンフィラメント 自動水平調整 レーザー刻印拡張可 金属系PLA拡張可 メーカー保証 3FJSPXJP00G
2022.10.18
コメント(0)
-
傾斜トライローター付き全翼機,強風下での水平飛行テスト
表記の機体を屋外で飛ばしてきました.ここのところ,台風や雨ばかりで飛ばすチャンスがありませんでした.今日も強風.でも来週は学会発表なのでその前に一度は飛ばさないとと思って...危険なので風に正対して直線飛行のみ.
2022.10.05
コメント(0)
-

VL53L1X TOF レーザー測距センサモジュールのテスト
レーザー測距センサモジュールを動かしてみました.計測距離は4mの物です.まず,赤外線が本当に出てるかどうか,写真撮って見たら少し光ってました.Arduinoのサンプルについては,以下のサイトを参照.ちゃんと4m測れました.https://asyano.jp/vl53l1x/ただし,loop()の中がディレイ無しで回ってて計測に時間がかかってます.millis()関数を使って測ったら1回の計測に100ms近くかかってました.そこでサンプルプログラム中の計測時間に関係しそうな以下の2行の数値を減らしてみました.sensor.setMeasurementTimingBudget(50000);sensor.startContinuous(50);ensor.startContinuous(50); の 50 -> 30 にすると,1計測当たり約50msになりました. sensor.setMeasurementTimingBudget(50000); の 50000 -> 20000 にしてみると,1計測当り約25ms になりました.ただし,遠距離の計測に問題ありそうな感じ.(ライブラリの詳細をしらないのでかなり乱暴なことをやってるので嘘かも.)2mくらいの距離を25msで測れれば,自分の意図した用途での計測時間に問題なさそうなので,屋外に持って行ってテスト.すると全くノイズばかり,直射日光に当たらない場所の計測もできませんでした.日中の屋外では日影だろうと使えません.日なたはノイズのみ.以下は測定距離2mのもの.Rasbee 2個 GY-530 VL53L0X レーザー測距センサーモジュール ToF測距 飛行時間型測距センサー 2.8~5V IIC GY-VL53L0X 赤外線距離測定
2022.09.30
コメント(0)
-
傾斜クワッドローター付き全翼機の大型機,飛び始めました
大型の機体を作ってます.やっと飛び始めました.とりあえず離陸とホバリングと前後移動はできたので,水平飛行の調整はこれから.
2022.09.22
コメント(0)
-

先日注文したTシャツが届きました.
前の書込みはこちら.https://plaza.rakuten.co.jp/cpu4edu/diary/202209070000/注文画面で見たイメージ通りです.問題は,普段着て近所を歩けません.どこにそんな研究所あるの?って目で見られます.いいなと思った方は注文はこちらからどうぞ.https://apparel.raksul.com/
2022.09.22
コメント(0)
-

ロボトレーサ―調整中
明日土曜日に体験講座があるので,ロボトレーサを調整中.1年たって入れっぱなしの電池が液漏れして電池ボックスごと交換したのが2台.マイコン書込み不良1台.モーター破損が数台.センサカバー欠落も数台.頑張って23台動くようにしました.
2022.09.16
コメント(0)
-
2022年マイクロマウス九州地区大会
今年も熊本高専で開催されます.2022年マイクロマウス九州地区大会https://sites.google.com/site/mousekyushu/2022
2022.09.14
コメント(0)
-
ディープテックグランプリ2022で発表してきました
株式会社リバネス主催のディープテックグランプリ2022というので発表してきました.熊本のテックプランターで発表しませんかと言われて,作ったドローンの宣伝になるならと思って発表して,東京でディープテックグランプリというのがあるのでエントリーしませんかと言われて,エントリーしたら,ファイナリストに選ばれたので発表しませんかと言われて,新型ドローンの学会発表の感覚で行ってしまいました.この発表会の趣旨は,”技術シーズと起業家の発掘育成を目的としたプログラム”で起業家という感じじゃないので申し訳なかったですが,自分が起業しなくても技術相談や技術公開はしてドローンの起業支援はしますし,自分の職場が結構ガチガチ融通利かないので,制度上起業しないとできないことを頼まれらそのために起業しても良いというスタンスです.ディープテックグランプリ2022|TECH PLANTER by リバネス|未解決の課題を科学技術の集合体“ディープテック“で解決する、アジア最大級のリアルテックベンチャーエコシステム応募件数は数百件あったそうで他のファイナリストの方々の発表と情熱は素晴らしかったです.とても勉強になりました.自分がおなじ舞台立っても良かったんでしょうか...
2022.09.12
コメント(0)
-

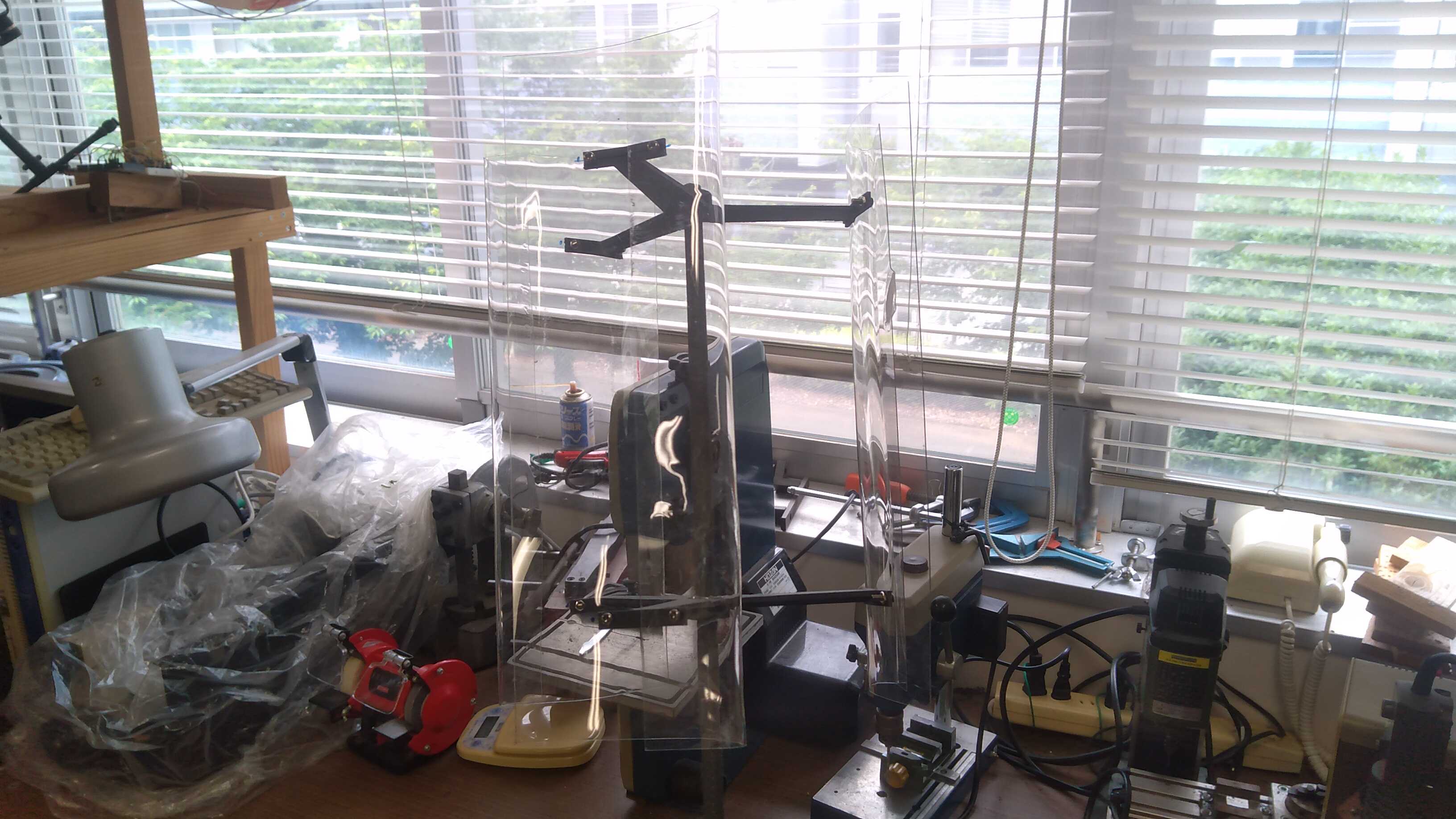
今日の実験は,ラインの張力によるモーターの推力制御
以前から取り組んでる件です.ラインの張力をロードセルで計測するところまでは作ってたので,今日はモータの制御プログラムを書いてます.最初は,単純にモーターの推力に対して,張力の上下で推力を変化することを確認し.次に,モータの推力に対して張力の下限を定めて推力のリミットをかけてみました.これで良ければ簡単なのですが,実はこれでは危険で,いったん張力が下がる方向に推力かけてしまうとそのまま上昇していくことになり,いちおう想定して安全策を組み込んでいて無事でしたが不連続で扱いづらいことになりました.その後,比例制御だけを組み込んだら,案の定,上下に発振を始め振幅増大していきました.もうちょっと凝って張力で推力をPID制御してみます.
2022.09.07
コメント(0)
-

オリジナルTシャツ作成で安いサイト
Maker Faire Tokyo2022に行った時,結構オリジナルTシャツなど服装揃えて来てる団体があって,なんかカッコいいなぁと思ったので調べてみたら,手軽に低価格でできるサイトがありました.ラクスルさんでトップページはhttps://raksul.com/なんですが,ここで左のメニューの下の方に行って販促ノベルティグッズのTシャツ選ぶと製版して大量に印刷できるサイトに行きます.数が多ければこちらが良いんでしょうけど自分の場合は数枚あれば良いので,左メニューのすぐ下にある,アパレル,ユニフォーム「プリント,名入れ」を選びます.https://apparel.raksul.com/ここで,トップスのTシャツに行って一番値段の安いのを探すと,3.5オンス AIT インターロックドライTシャツ 590円です.https://apparel.raksul.com/tops/t-shirts/products/1965?psi=36184ここで色とサイズを選び,印刷方法を選ぶところで刺繍を選ぶと単品から低価格で作れます.刺繍を文字だけで入れると,左胸に8x8cmの寸法で390円Tシャツと合計で1着の注文でも981円,送料無料です.試しに1着だけ注文.新しいブログタイトルの「おびやまロボット研究所」と左胸に蛍光黄色で刺繍をいれました.でも,着る場面はほぼないですね.来年もメイカーフェアに出すことになったら,「熊本高専Makers」で複数枚作ります.それか,普通に仕事で外に出る時用に「熊本高専」だけでポロシャツ作っとくとか.
2022.09.07
コメント(0)
-

ブログタイトル変えました.
変更前:CPUを作ろう ~計算機教材とマイコンと電子工作~変更後:おびやまロボット研究所 ~CPU・マイコン電子工作と自作ドローン~”CPUを作ろう”で検索すると以下の本がヒットして,自分のサイトがヒットしなくなってきたのでここは負けを認めてサイト名を変えることにしました.作ろう!CPU [ 上原周 ]Youtubeのチャンネルに名前がついていなかったので,住んでる地名「帯山」から「おびやまロボット研究所」とチャンネル名を付けたら,他に競合するサイトがなかったようなのですぐ検索にかかるようになりました.なので,楽天ブログも同じタイトルにして,サブタイトルに「CPU」というキーワードは残しておきます.中身はこれまでと同じ,思いついた電子工作関係をいろいろ作っているサイトです.
2022.09.06
コメント(0)
-
ブログの画面のトップに著書3冊貼り付けてみました.
楽天ブログが勝手につける広告がどんどん増えて来て,上も下も左も広告いっぱい.記事の間にも.それで記事がとても見づらくなってるので,トップ画面に以前貼ってたお勧め本は消してたのですが,最近ブログのタイトルと中身が合致してないのもあって,初心に返って?もともとCPUを作ってみるブログだったのを知ってもらうために著書3冊貼ってみました.
2022.09.05
コメント(0)
-
Maker Faire Tokyo 2022の出展タグ来ました.
Maker Faire Tokyo 2022の出展タグ来ました.もうすぐですね.
2022.08.22
コメント(0)
-

ロードセルの実験
ちょっと機器に組み込んで荷重を測りたいところがあるので,ロードセルの実験.秋月に売ってあるロードセル シングルポイント(ビーム型) 2kgとHX711使用 ロードセル用ADコンバータ モジュール基板 との組合わせて使ったことなかったので実験.基板にはネジ止め式のターミナルブロックがついてますが,ロードセルの線は細いので直接半田付け.ロードセルの説明書で色のついた配線が何かを調べて,基板の4ヵ所に半田付け.力を加える時は,片方を机に押し当て,もう片方にまっすく下向きに荷重をかけます.手で持ってぎゅっと曲げるとダメです.片方が伸びて片方が縮むように荷重をかけないといけません.Arduinoで読み取り,サンプルは秋月の基板の方のページにあります.グラフ表示してみたら,指示は割と正確,誤差も少なそう.ただし,レスポンスが遅い感じ.プログラムをみたら5回計って平均取ってるみたいです.1回の測定もディレイを入れながらクロックをH,L切り替えながら1ビットづつ信号読み取って数値化してる感じなのでちょっと時間がかかります.何回平均取るかは測定関数呼び出しの時の引数で指定できるので減らして1回とか2回で読み取ってみるとまあまあじれったくない速度にはなりました.広告↓ロードセル 重量センサー モジュール - 20KG AND HX711【在庫品】
2022.07.23
コメント(0)
-
マグヌス効果を応用した省電力ドローン
機体中央に垂直軸風車を積んで風車の回転によるマグヌス効果を利用して省電力飛行を狙ったドローン.先日作った翼3枚を取り付けました.まだ飛ばしてないですが,持って走った感じはスムーズに回って振動もないです.ただし,揚力もあまり感じない.取付角を調整したりして,うまく狙った効果がでるようにしてみます.
2022.07.18
コメント(0)
-

垂直軸風車の翼が3枚できた.
見ての通りできました.重さは14-15gで誤差1g.
2022.07.13
コメント(0)
-

垂直軸風車の回転翼作成,その2
垂直軸風車の回転翼作った.形状はまあまあ設計通り.フィルムはまた黒.カーボンロッドのフレームバルサは合わない感じがしたので透けない黒にしたけどやっぱり夏の暑さが心配.適当にプラ板切って作ったのと比べると,重さは半分.小さな垂直軸風力タービン発電機20W、DC12Vの風力発電機5枚のブレード【領収発行可】
2022.07.05
コメント(0)
-
傾斜トライコプター型VTOL,試験飛行
こちらも試験飛行しましたが,動画リンクをあげてなかったで.体育館の中なので大きな動きはできませんが,ゆったり直進に入ったりホバリングに戻ったり,左右の操作性を確かめた後に旋回飛行します.屋外で飛ばしたいところですが,航空法が変わったために外では飛ばせません.機体登録待ちの状態です.
2022.07.01
コメント(0)
-

マグヌス効果による省電力ドローン,体育館で試験飛行
マグヌス効果による省電力ドローンを体育館で試験飛行してみました.あくまで操縦した感覚ですが,前に飛ぶときに浮き上がる感じで,後ろに戻ってくるときに沈む感じです.取りあえず,手元にあって設定が簡単なCC3Dを使って飛ばしましたが,次はフライトコントローラを電流電圧のログ機能があるものに替えて電力を測ってみようと思います.広告↓小さな垂直軸風力タービン発電機20W、DC12Vの風力発電機5枚のブレード【領収発行可】
2022.07.01
コメント(0)
-

航空法改正されました
個人的には改悪だと思ってますが.せっかく買ったMavic min がもう気軽に飛ばせなくなりました.広告↓【翌日発送可】DJI ディージェイアイ Mavic Mini マビックミニ
2022.06.20
コメント(0)
-
Maker Faire Tokyo 2022 出展
Maker Faire Tokyo 2022の出展承認がきました.今度は学校関係でも,机椅子とかレンタル費用がかかるのでお金の工面がたいへん.
2022.06.15
コメント(0)
-
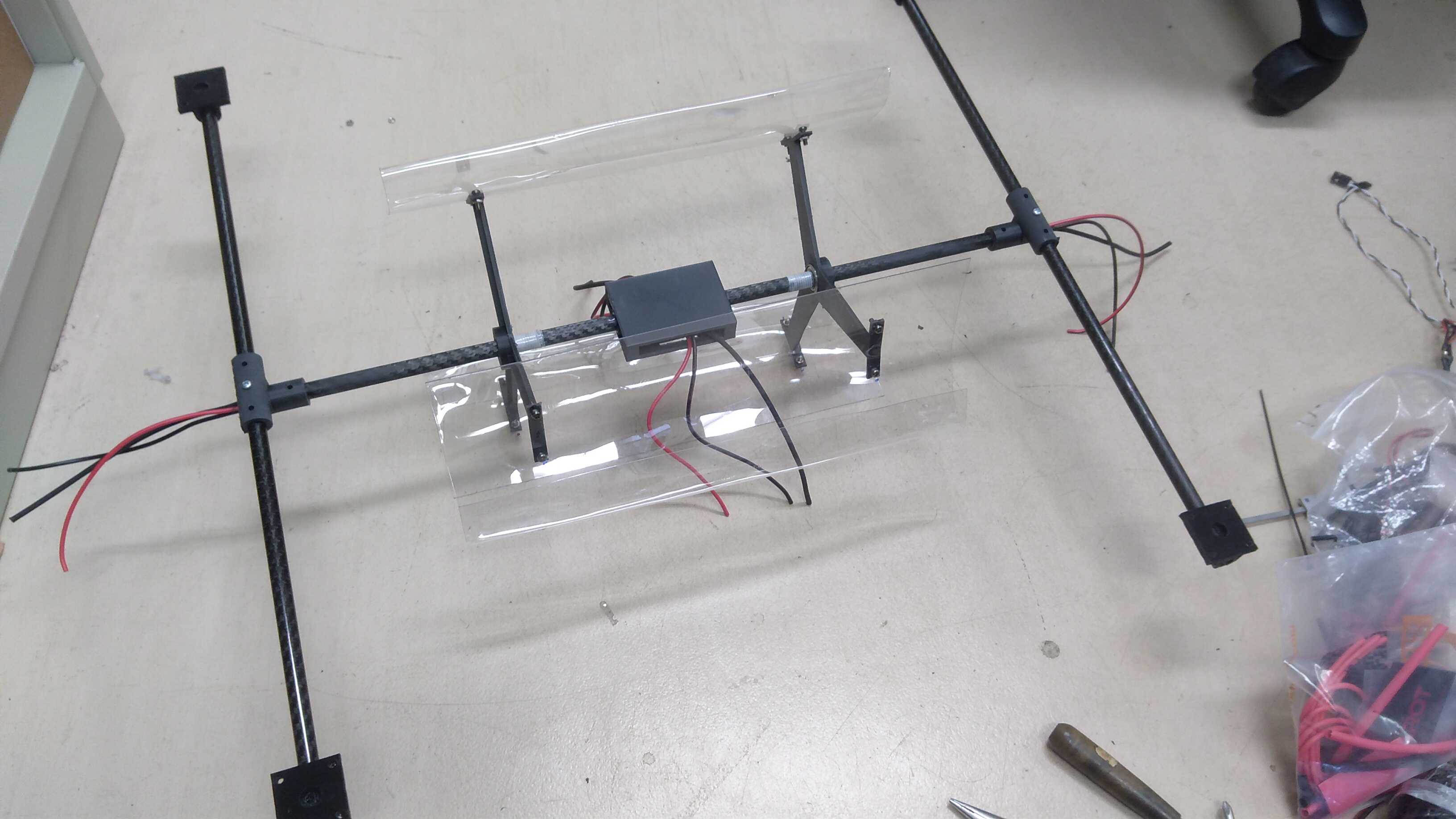
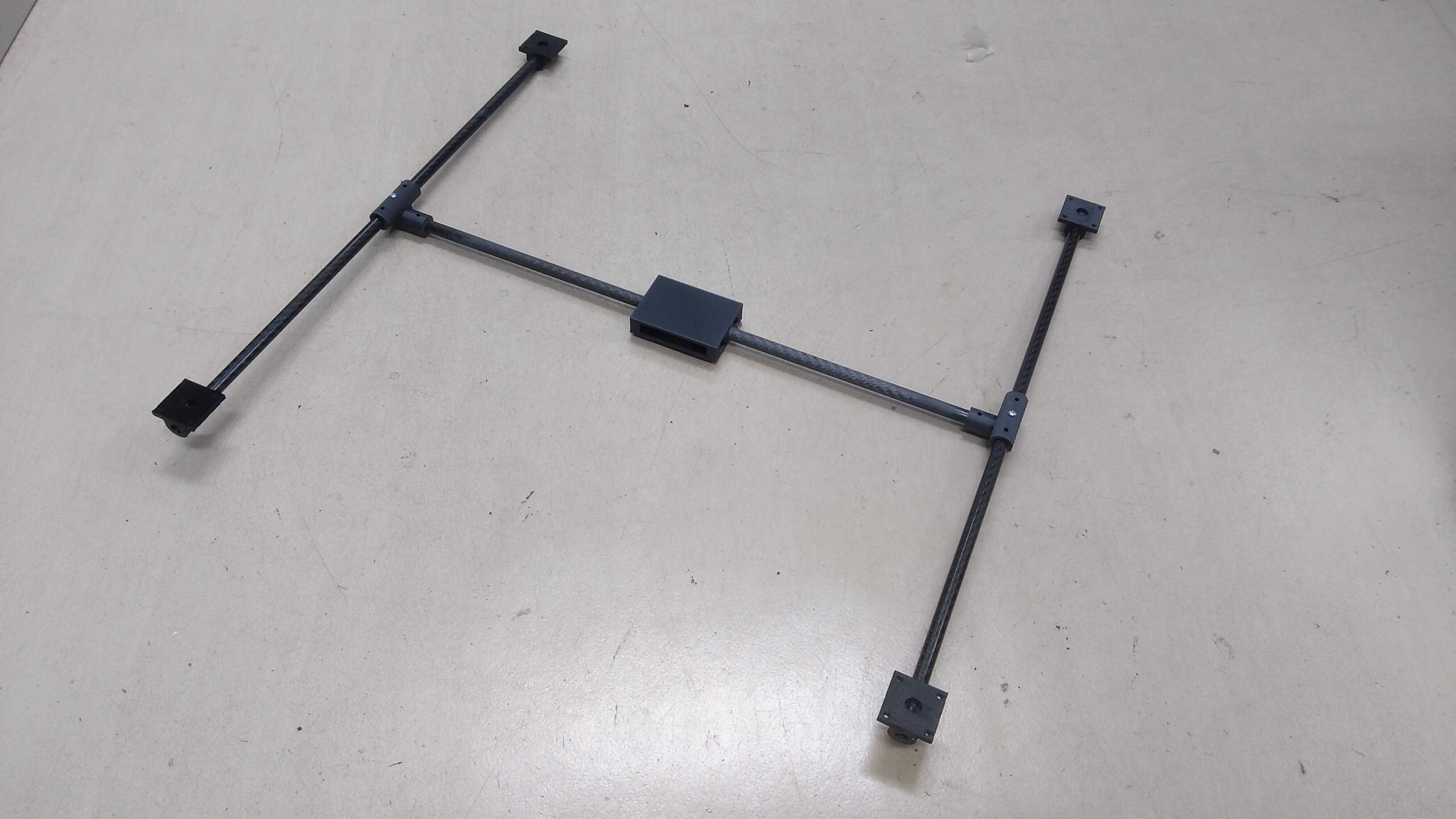
傾斜クワッドローターを付加した全翼機の大型機製作.
航空法改正(自分にとっては改悪)のために急ピッチで機体製作.以前作った傾斜クワッドローターを付加した全翼機がなかなかいい感じに飛ばせるので,ずいぶん前に作った大型の後退翼をベースにして,同じ構造の機体を作ってみました.まずは部品出力.ベースのフレームは,14㎜のカーボンパイプにしました.フレームを組みながら長さ調整しているところ.大きさを決めて主翼を載せたところ,となりは昨年度作った小型試作機体.エレボンを切って,垂直尾翼を取り付けたところ.裏面から電装系の配線.サーボホーンも手持ちがなかったのでちょっと大きめに設計して3Dプリンタで出力.機体完成しました.前面から.斜めから,床面に置いたのが1mの定規なので大きさが良く分かります.機体重量はバッテリー込みで2.4kg.モーター1基あたりカタログ値で約1.5kgの推力が出る(プロペラはカーボンに替えて)ので,合計6kgの推力になります.最大2kgくらいは搭載できるでしょう.
2022.06.10
コメント(0)
-
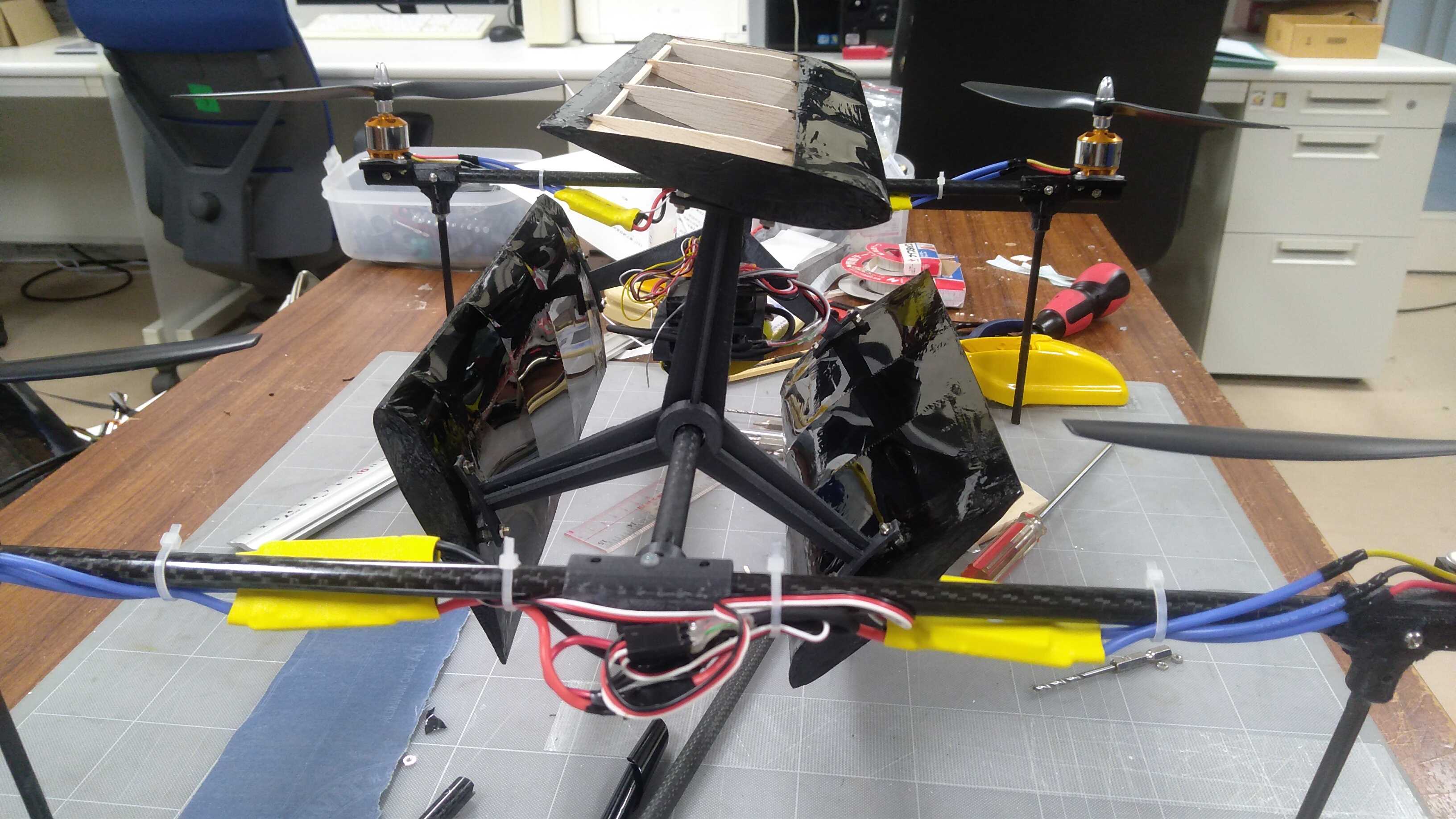
マグナス効果による省電力ドローン
これまで作ってた直線翼垂直軸型風車をフレームに組み込みました.モーター積んで機体完成!どいうことかというと,ドローンが前進する時に垂直軸風車が回転し,風車の揚力とマグナス効果による揚力が機体を持ち上げる方向に働くので,省電力で飛べるという仕組みです.従来,取付角度を自動調整して最適な迎え角になる主翼を持ったドローンを作ってましたが,この風車は,機体の前傾角度がどうであろうと常に揚力を生んでくれるというものです.取りあえずはホバリングまで確認.ホバリング時でも,プロペラの起こす気流で中央の垂直軸風車が回転しています.前進するとこれが加速して回転します.
2022.06.10
コメント(0)
-
今日の進捗
みなさん進捗どうですか?
2022.06.06
コメント(0)
-
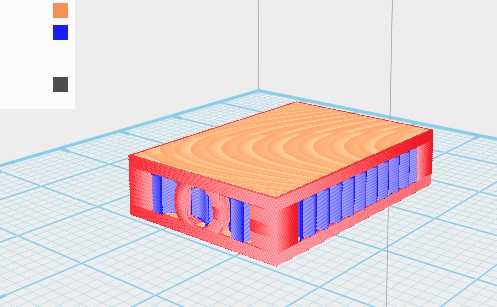
昨日に続いて作ったもの.
昨日作った垂直軸風車に続いた作った部品.棒をつないで固定するボックス上の物とモータプレート.さて何ができるのでしょうか?小さな垂直軸風力タービン発電機20W、DC12Vの風力発電機5枚のブレード【領収発行可】
2022.06.02
コメント(0)
-
垂直軸型風車,透明なプラバンで製作
透明なプラバンなのでちょっと見づらいですが翼型に曲げて揚力翼として,垂直軸型風車を作ってみました.ちょっとずつ加熱しながらの手曲げなので,形はバラバラで思った通りにできませんでした.回ることは回りますが,抵抗が大きくて回転数が低いです.高速に回転して欲しいので,翼は作り直してみた方が良さそうです.垂直軸風車製作ガイドブック (自然エネルギー・ガイド) [ 松本文雄 ]
2022.06.01
コメント(0)
-

垂直軸風車を作ってみました.
ちょっと次の工作の予備実験で,垂直軸風車を作ってみました.まずはいろんな形のものを製作.一番よく回りそうなものにベアリングを追加.手に持って渡り廊下を速足で歩いて回してみました.いったん回りだすと後は弱い風でも回ります.風力発電機を楽天で売ってます↓小さな垂直軸風力タービン発電機20W、DC12Vの風力発電機5枚のブレード【領収発行可】
2022.05.24
コメント(0)
-

ラージボール用卓球マシンの自作,ダブルローラーになってナックルボールが出せるようになりました.
ダブルローラーになってナックルボールが出せるようになりました.ラージボールでナックルの連打は大事です.ニッタク 卓球マシン ラージボール専用ロボット ロボッチャ44 初心者から上級者まで対応 NT-3021NB-1072 ニッタク 卓球ボール ラージ44ミリ 練習球(オレンジ)2ダース(24個入り) Nittaku プラトップラージボール
2022.05.18
コメント(0)
-
ラージボール用自作卓球マシンの試打
試打しました.まあまあですが,回転かかりすぎです.回転を弱くすると飛ばないので近くに持って来てます.買うなら...ニッタク 卓球マシン ラージボール専用ロボット ロボッチャ44 初心者から上級者まで対応 NT-3021
2022.05.10
コメント(0)
-

ラージボール用卓球マシンを作りました,その3
前回までで無事1球ずつ球を送って打ちだすことができました.そうなると次は欲が出て来て,ヘッドを左右に振ってコースを変えたいと思いました.最初からそういう想定ではなかったのですが,一番簡単なのは土台ごとヘッドを方法です.サーボにより10ー20度くらいは首を来るようになりました.ただし,片側ネジで緩く止めて,もう片側をサーボで無理やり前後させて摩擦が大きいので,ふり幅は大きくできません.ラージボールの卓球マシンの首振り機構高級機種↓Nittaku ニッタク 卓球マシン 卓球ロボット ラージロボ ラージボール専用 卓球ロボット NT-3020
2022.05.02
コメント(0)
全2189件 (2189件中 51-100件目)
-
-

- 【楽天市場】新製品の激安 価格比較…
- Có nên mua máy lọc nước ion kiềm
- (2022-12-29 13:40:56)
-
-
-

- デジタル一眼レフカメラ
- 運動会をとびっきり素敵に残しましょ…
- (2024-09-26 16:15:11)
-




