

4輪板トレーサの製作
マウスの調整をすればするほど、自分には向いてないことがわかってきた。
たくさんのパラメータをしっかり取るか、ソフトを作り混んでパラメータを減らすか、あるいはその両方をやらないと走りは良くならない。
自分は忘れっぽくて飽きっぽい人間なので、ソフトは改良してるうちに何をやろうと考えてたのか忘れてしまうし、パラメータをしっかり取ろうと思っても途中で飽きて嫌になるし。
パラメータの少ないロボトレーサの方が自分には合ってるかもしれない。
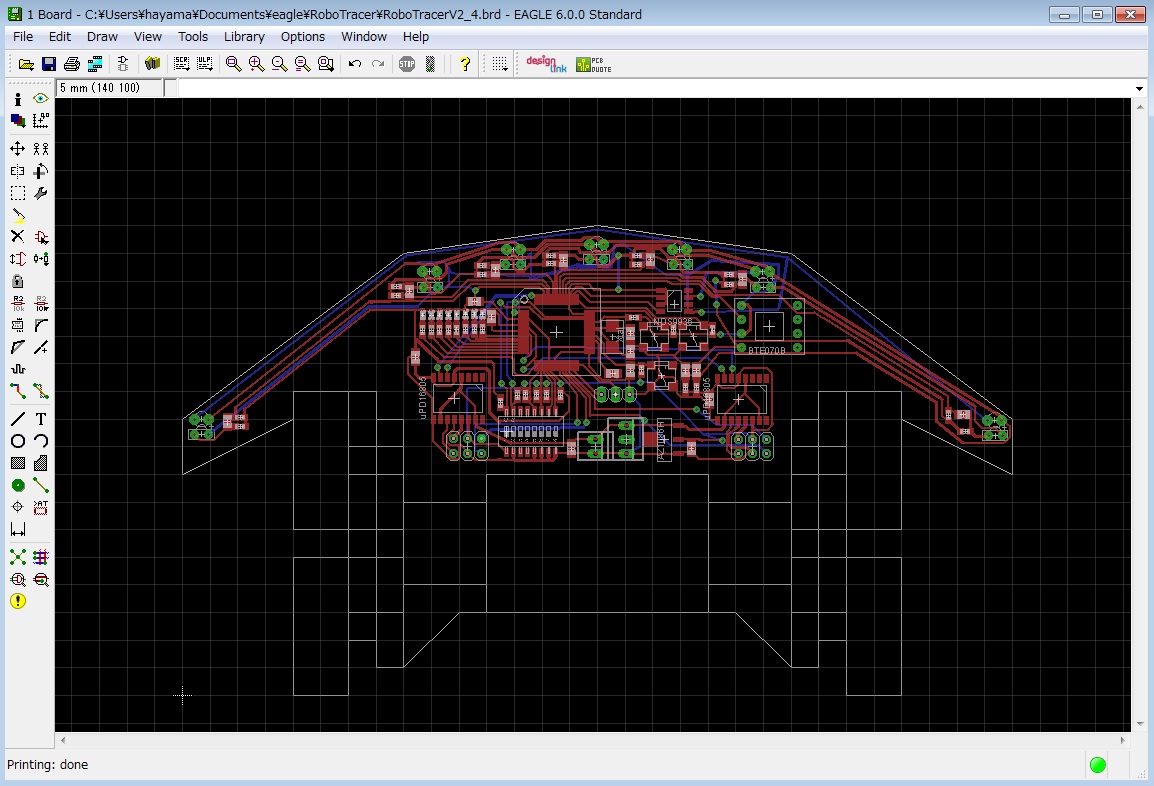
というわけで、1枚基板のロボトレーサを考え始めた。連休は、子守しながらEagle作業。
連休成果↓
前に作ったマウスのセンサ部分を直して、部品配置を横長に変えて作りました。CPUは時代遅れのSH2-7125のまま。小型、軽量、低重心、幅広、4輪の高グリップでロボトレーサ1号機とほぼ同じソフトで走るはずです。実働5日確保できれば動くものが作れそうだけど、いろいろと行事と締め切りが続くので間に合うかどうか・・・?
-----------------------------------------
4輪ロボトレーサその2、基板作製
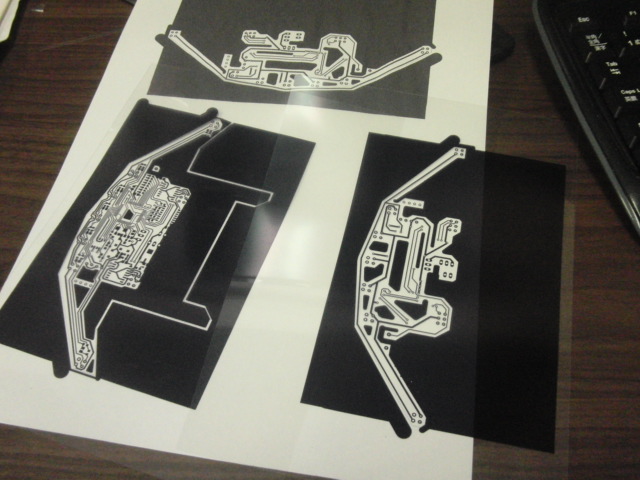
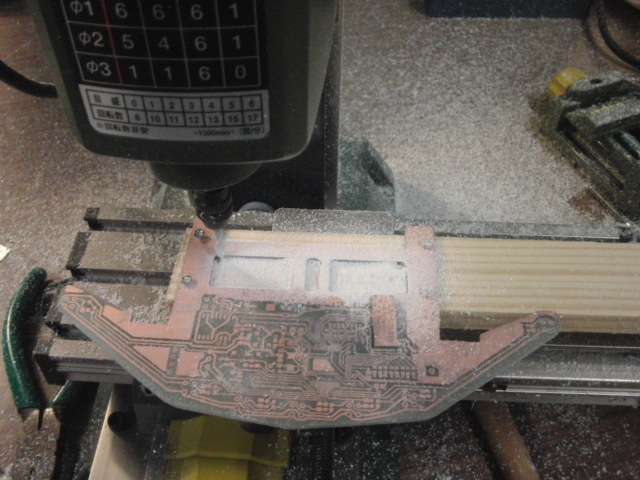
基板の図面を白黒で両面別々にプリントアウト。
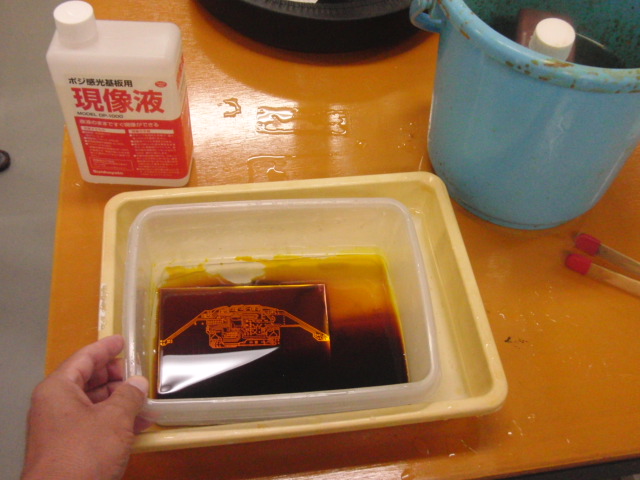
こんな感じでエッチング。2回失敗して3度めで上手くいきました。失敗の原因は、古い基板を使ったので露光時間が合わなかったためと、OHPシートの光の透過が高く、かなり短めに時間を決めないといけなかったこと。
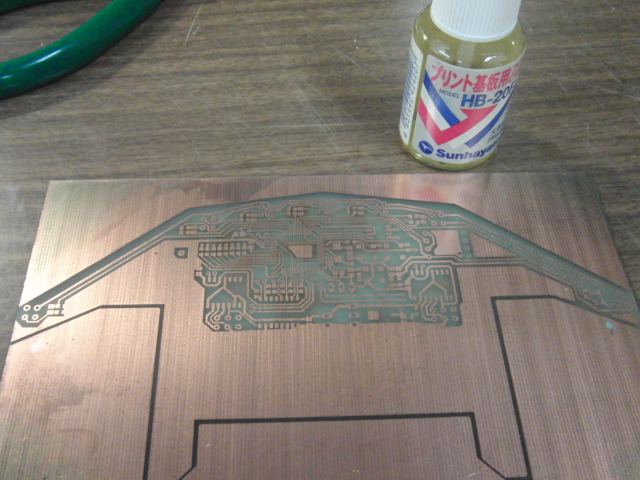
出来上がった基板。透かしてみて、両面が合っててよかったです。
レジストを有機溶剤で剥がして、フラックスを塗布。
その後、基板を切り出し。この時点で21g。モータの配置を決めたら肉抜きします。

横着して失敗しました。こぼさなきゃいいや、って感じで指でつまんで現像やエッチングの具合を見て、指先だけ手を洗ってたら、手のひらにどっちかの液がついてて、皮がちょっと剥けてしまいました。現像とエッチングのどっちの仕業かな…
->調べたらアルカリ性の現像液のせいでした。
-----------------------------------------
4輪ロボトレーサその2、基板の肉抜きと足回りを少し作製
今日も夕方から作業。
基板の肉抜き、4gほど軽量化。
基板と足回りと電池で94g。もっと削ってもいいかなぁ?
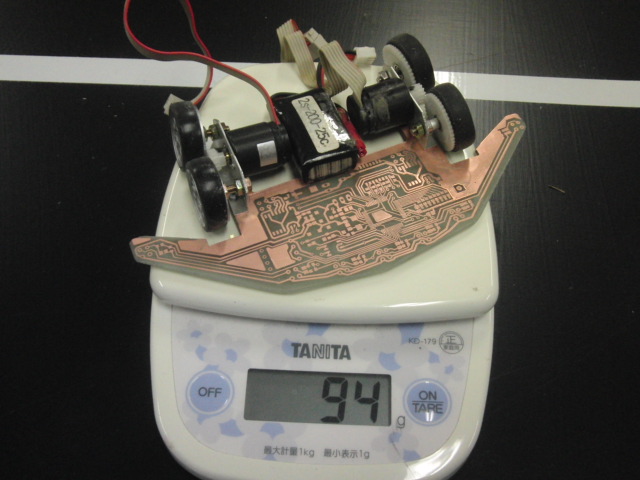
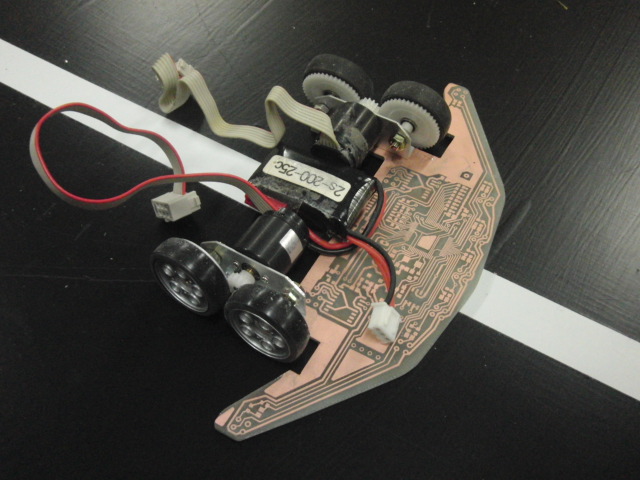
できたところまででコースに置いて眺めてみる。
-----------------------------------------
4輪ロボトレーサその3、基板ハンダ付け完了。
基板のハンダ付け完了しました。26gです。
部品を全部乗っけると103gでした。
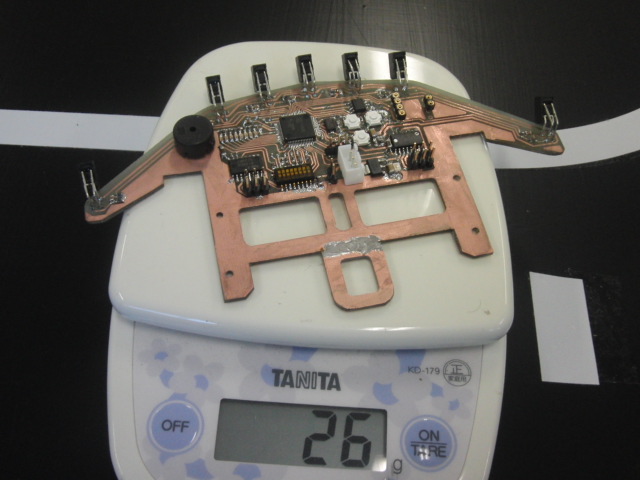
あとは、導通を再チェックして火入れ。マイコンが動けば足回りの組み付け。
不具合がなければいいですが。
動くことを願って(というより何が何でも動かして)中部地区と全国大会のエントリーのテクニカルデータを修正。これを持って行きます。
--追記--
失敗した。
フォトインタラプタは簡単にLED,Photo-Trが入れ替えられるので、基板の配線を優先して入れ替えて使うことにして設計してたのをすっかり忘れてた。結果、赤外LEDが左右逆につけて、部品の予備はなし、地道に外して入れ替えるとしても、時間的にどんどん厳しくなる。
あと、スルーホールがかなり失敗してる。ハンダ付け後に残ったピンをギリギリの長さでニッパーで切って行ったら、面積が小さい上にストレスがかなりかかったようで、何箇所も断線してた。要注意。
あと、ブザーがならない。なんでだろう?
-----------------------------------------
4輪ロボトレーサその4、ハード完成
付け間違えたLEDの足を切って左右入れ替えてLEDを点灯させたらビンビン来て、
ブザーは接触不良だったのでハンダを付け直して、
右モータのコネクタが固定部品と干渉してしまってたのをピン延長してリカバリして、
エンコーダの動作チェックして、モータ回してみて、
ハードウェアの基本性能の確認を追えました。
後はソフト移植。
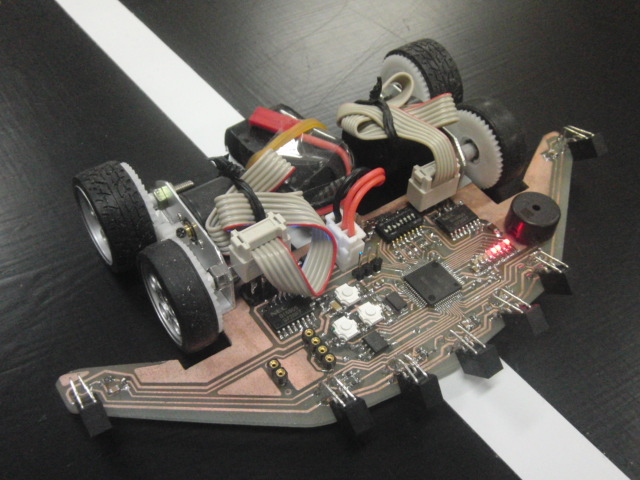
15cm✕10cmくらい、重さは104g。
モータのコネクタを短くしたり、ボディを切りこんだりすると100g切りそうですが、
まともに走りだすまでは冒険しません。
ハードの特徴は、半径10cmの円弧上にセンサが並ぶ配置にしてます。
半径10cmのターンがなんとなく早く回れそうな感じがするので。
幅広でヨー軸?の制御性をよくしました。
4輪なので直進安定性はいいはずです。
最大の特徴は・・・アニキの9.11のネタを真似ました。(パクリごめんなさい)
アニキに勝てる気はしませんが、ターン時の横Gに勝てる気がします。
まずは中部地区大会で無難に走れるように仕上げます。

-----------------------------------------
4輪ロボトレーサその5、走り始めました。
ソフトは移植中ですが、センサの部分と、モータを回す部分が直せたので走らせてみました。
タイヤ1回転当たりのカウント数が大きいので最初はすごくのろのろと動きました。
単純に速度と旋回の比例係数だけあげたら、試作機の最高速度を越えるスピードでも余裕で走り始めました。
これはソフトを頑張れば、頑張りに応えてくれるだけのポテンシャルはありそうです。
ロボトレーサの探索走行の動画
ロボトレーサの2回目走行の動画
-----------------------------------------
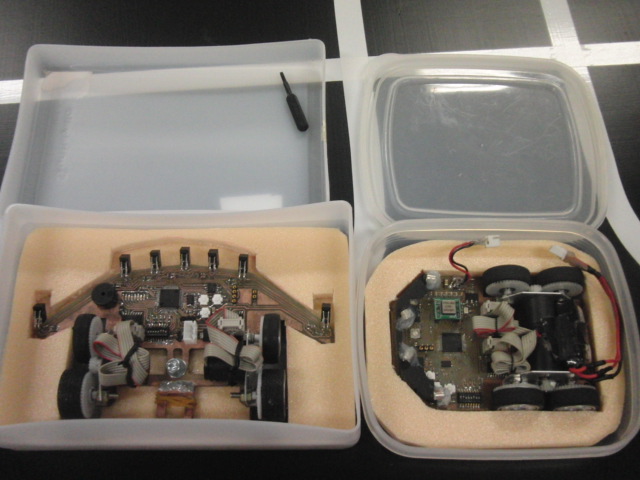
4輪ロボトレーサその6、ケース作りました。
センサをちょっと曲げると感度が大きく変わるので、ケース作りました。
最終的には、センサはホットボンドか何かで固定しようとおもうのですが、まだ調整を変えるかもしれないので、とりあえずこのまま収納。
ロボトレーサとマイクロマウスともにざっと作ってみたもの↓
-----------------------------------------
ちょっとソフトを改良しました。
バグ修正を数カ所。
走行の安定性を高めるように改良数カ所。センサ感度の初期調整ルーチン追加とか。
先日の動画より更に速くなりましたが、例外的な処理をほとんど入れずに、最小コーナーから直線までを限界速度をなめらかに変化させて加減速を適当に入れてPID制御で走るだけでは期待した程は早くなりませんでした。
これ以上速くするには、いろいろ工夫する必要がありそうです。
例えば、曲率の変化の具合に応じた速度処理を工夫する、
急なコーナーからの直線への立ち上がりの加速度をちょっと下げるとか・・・
ロボトレーサーの方が調整するパラメータが少なさそうで、飽きっぽい自分には向いてるかと思ったら、全然そんなことなさそうです。
-----------------------------------------
マイクロマウス中部地区大会2012の結果
クラッシックとロボトレースに出場.
ロボトレースは,大きなコースを走ったのは初めてで,走ってみてわかったプログラムの不具合数カ所を現地で修正,なんとか走るようになって本番.
1回めは段差で前が跳ねてコースを見失い途中停止.
2回めは運良く段差をクリアして探索完了.
3回めは弱気の速度で直線だけ加減速走行でタイムを縮めて完走.
最終的には準優勝のなりましたが,トップに大きく引き離された2倍以上のタイムですので,まだまだでした.


ヴイストン ライントレースロボット



© Rakuten Group, Inc.