

KHR-1HVの自律化
KHR-1HVの自律化
KHR-1HVをH8を使って自律で動かしてみます.
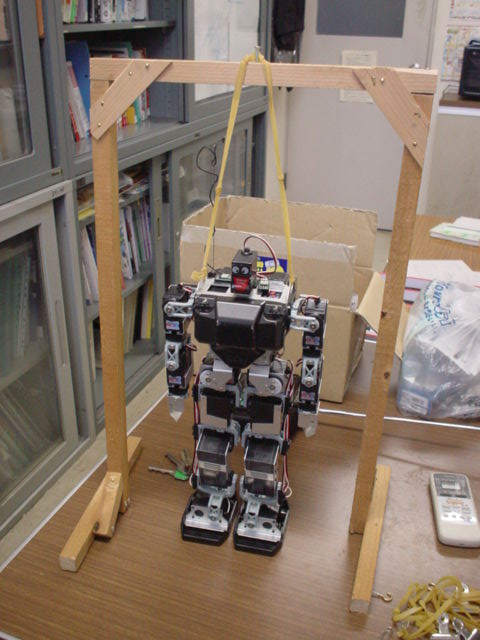
ちゃんとモーションを作るためには,吊り下げる必要がありそうなので,
急ごしらえで(やっぱり適当に)作りました.

吊り下げるとこんな感じ.強度も高さも十分.
ゴムの長さを変えれば,適当に荷重を与えることもできます.
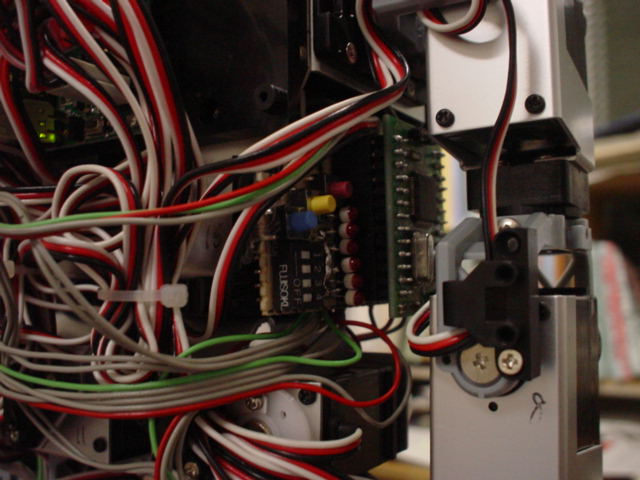
こんな感じで基板を加工しました.

拡大すると↓
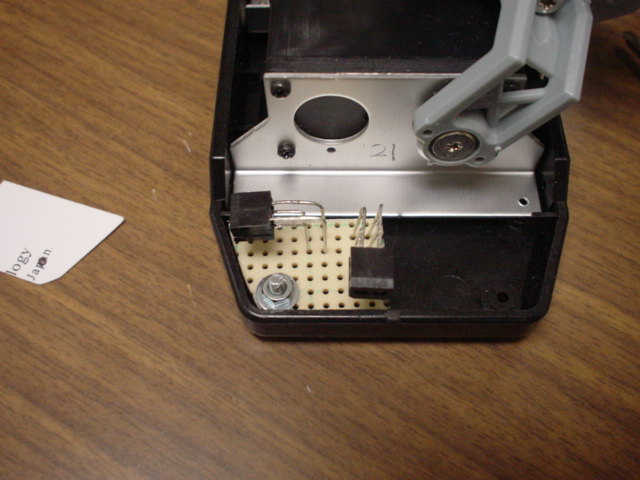
魚の目の治療? ではなく,ネジ穴がちょっと小さいので足裏からドリルで穴を広げてます.

こんな感じで部品を配置します.
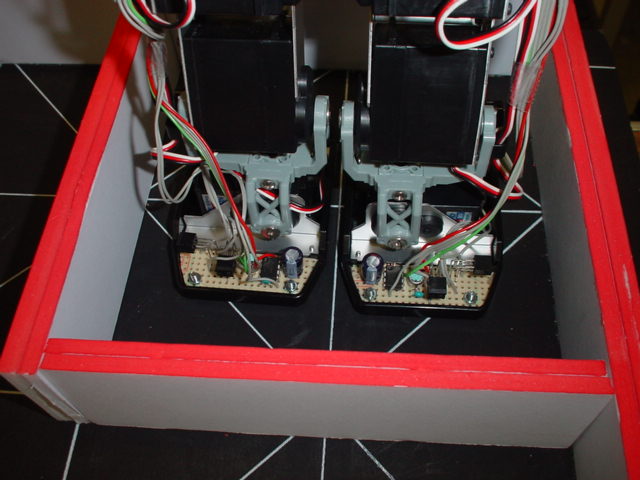
前後左右2個づつで8方向の光センサを取り付ける予定です.

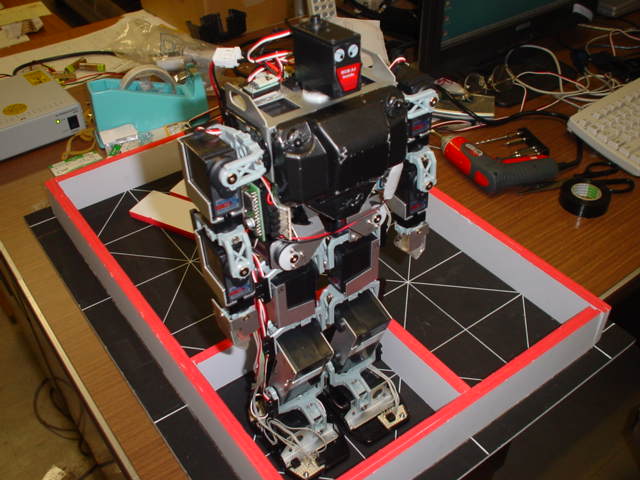
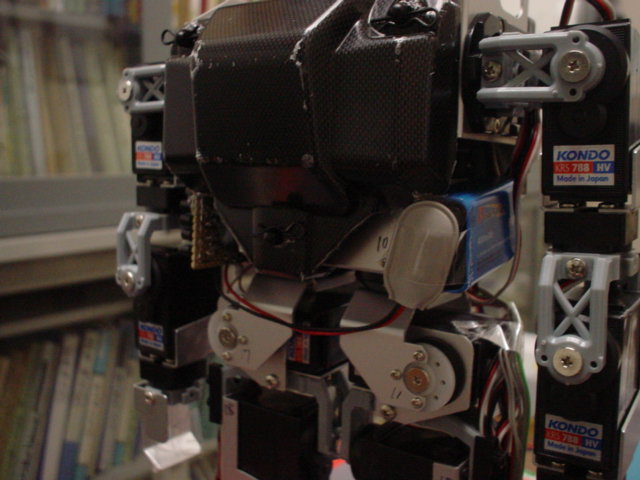
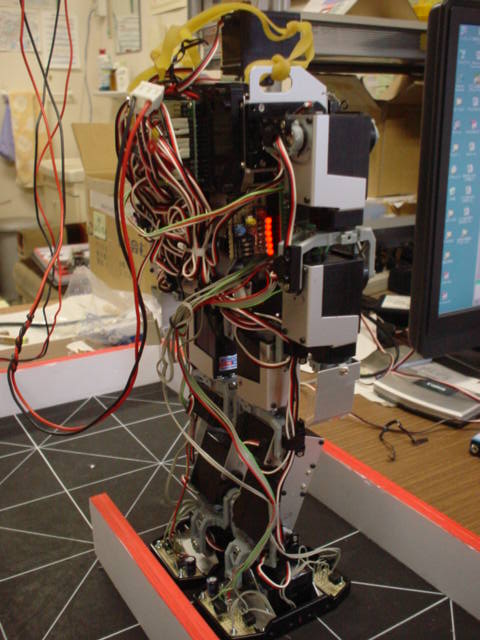
KHR-1HVに自律回路を装着しました.
爪先部分にセンサ.

かかと部分にもセンサ.
右脇のH8Tiny基板.
左脇の電池.
前後に壁を置いて電源ON! 怪しくLEDが光ってます.
細かく前進しながら前の壁を感知し,近づきすぎたら細かく後退するプログラムで動いている動画.

KHR-1HVパーフェクトセット
ジャンル別一覧
人気のクチコミテーマ
-
-

- アイフォン・アイポッドの必需品
- iPhone16pro 購入
- (2024-10-20 21:02:57)
-
-
-

- 楽天ラッキーくじ
- 楽天ラッキーくじ更新情報(2024/11/…
- (2024-11-26 14:12:27)
-
-
-

- 大好き!デジカメ!
- LEICA DG ELMARIT 200mm/F2.8/POWER …
- (2024-11-15 12:30:08)
-
© Rakuten Group, Inc.