

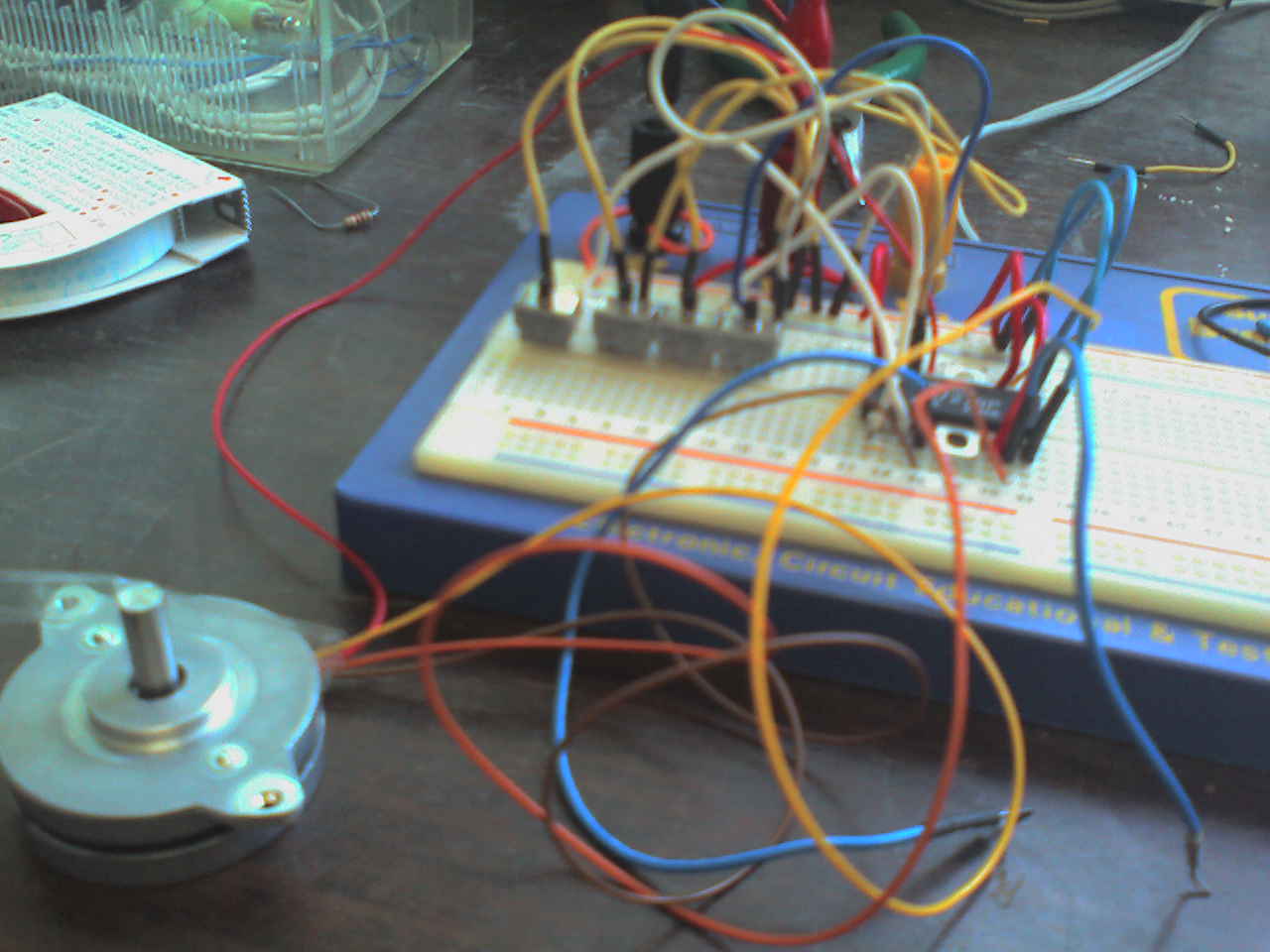
回路試作
バイポーラ型のステッピングモータは使ったことなかったので,
ブレッドボードで簡単なテスト回路を作って回してみました.
モータドライバはTA7291Pです.
ステップモータは,シナノケンシのSST36C0030です.
静止トルクは,マイクロマウスを作るのには十分なようですが,
回転数をどこまで上げられるかは,PICかH8で次に実験してみます.
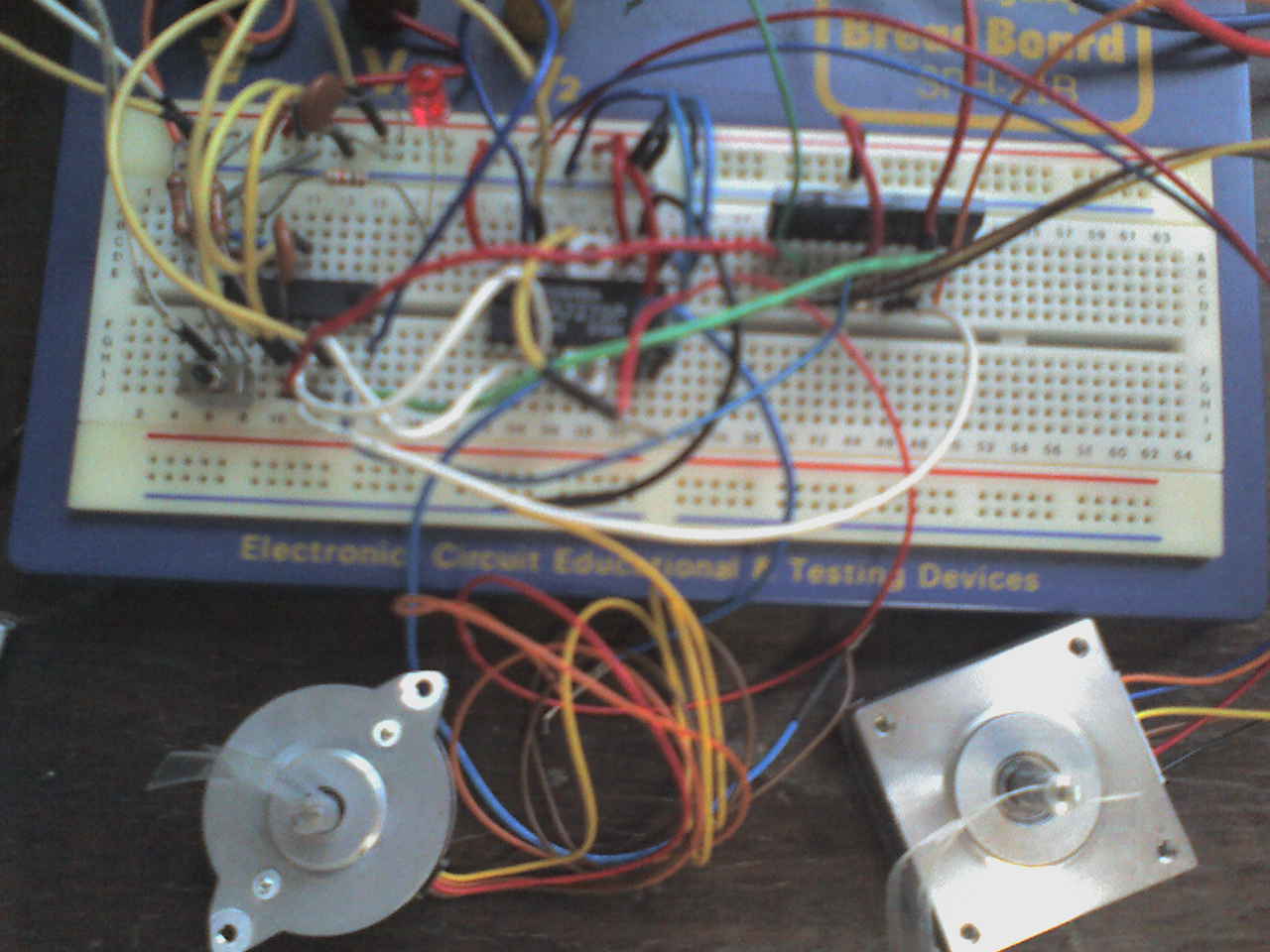
あと,浅草技研のAA-ATM15も回してみました.
動画は こちら.
-----------------------------------
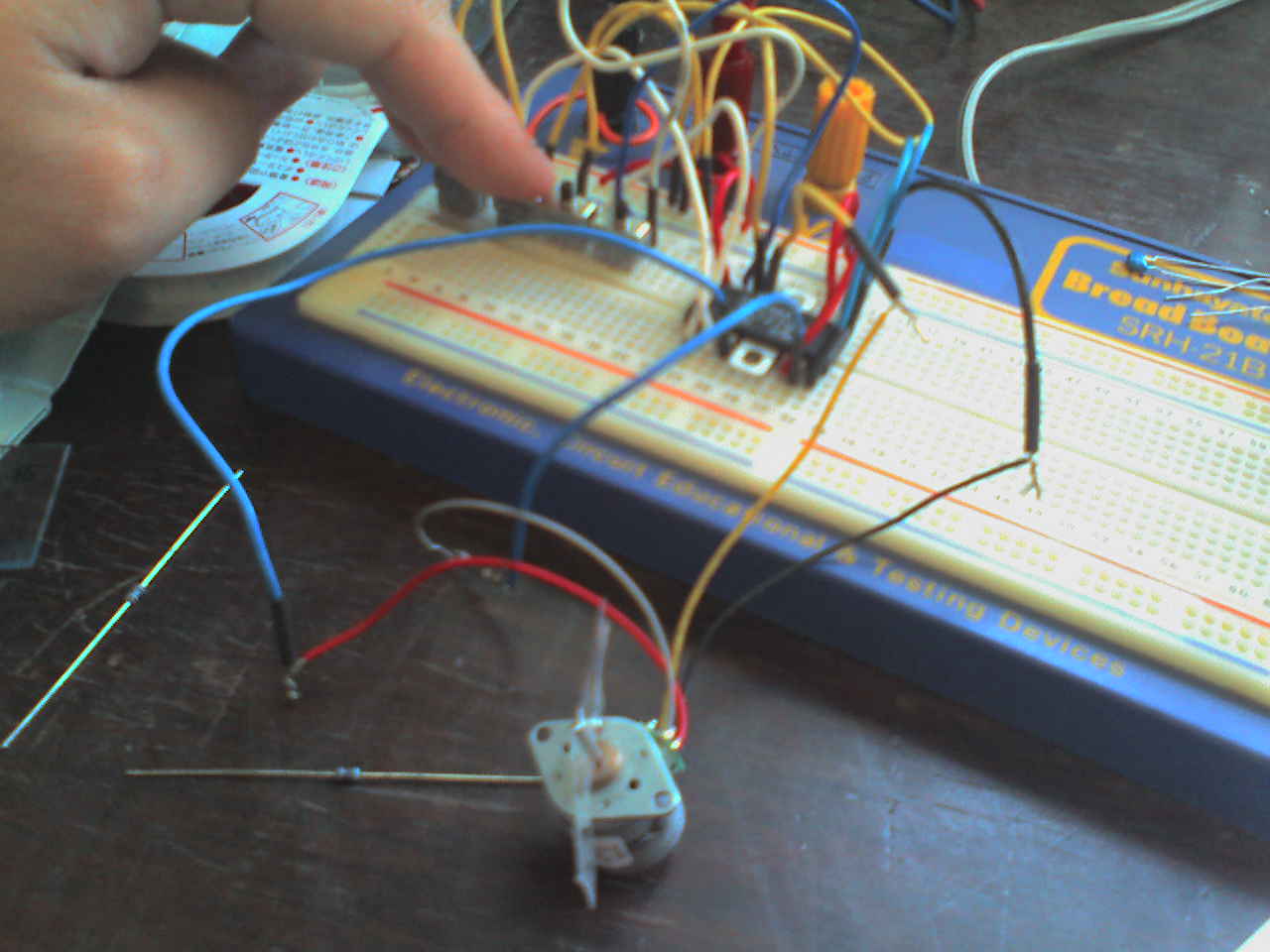
PICでバイポーラ型のステッピングモータを回してみました.
昨日の続き.
PICでプログラムを組んで,バイポーラ型のステッピングモータを回してみました.
1相,2相励磁の切り替えと,ステップ動作と,スピードの加減速ができるようにしました.
動画は こちら.
プログラムは こちら.
-----------------------------------
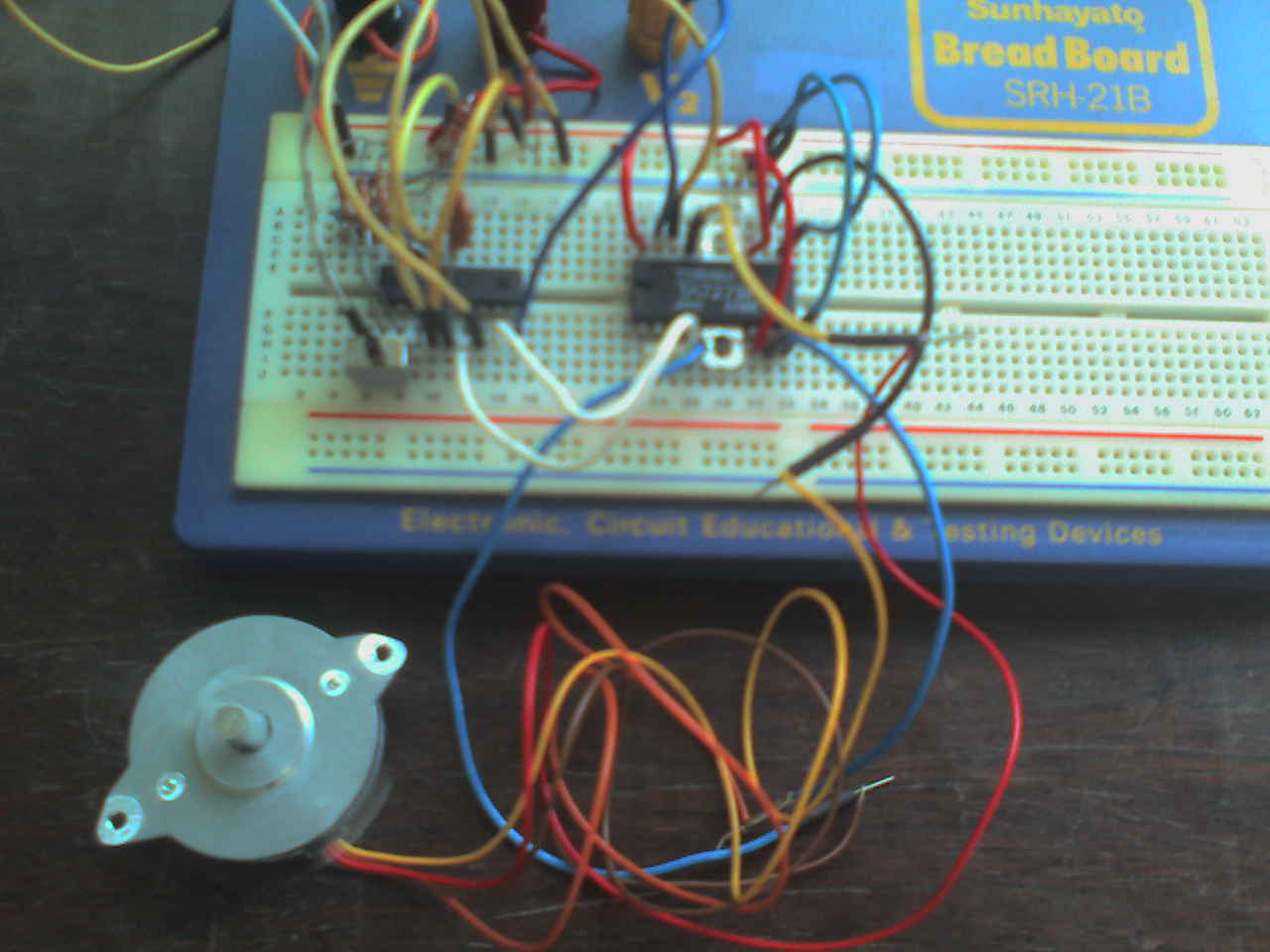
ユニポーラ型のステップモータ
ユニポーラ型のステップモータも一緒に回してみました.
単純なMOSFETスイッチ4回路(MP4401)を使いました.
この回路も前のバイポーラの回路も,スピードを上げるにはこれらじゃだめですね.
といっても今年は参加することが目標なので,無難なこれらの回路で次に進みたいと思います.
-----------------------------------
光センサの実験
学生といっしょに,光センサの予備実験を始めました.
赤のLEDを連続点灯して,フォトトランジスタで受光し,
単電源OPAMPで増幅して,適当な検出距離と感度がでるように考えます.
できたら次は,パルス駆動で応答速度まで考慮して回路を作ってみます.
LEDとフォトトランジスタは何通りか買ったので,それぞれ試してみます.
なにせ,マウスは20年前に一度作ったっきりなので,一から実験やってます.
-----------------------------------
結局,行き着くところは同じ.
マイクロマウス用の光センサの実験をしました.
1)最初,単純にLEDと,フォトトランジスタと抵抗の直列回路とで反射光の検出.
2)オペアンプによる信号増幅の実験.
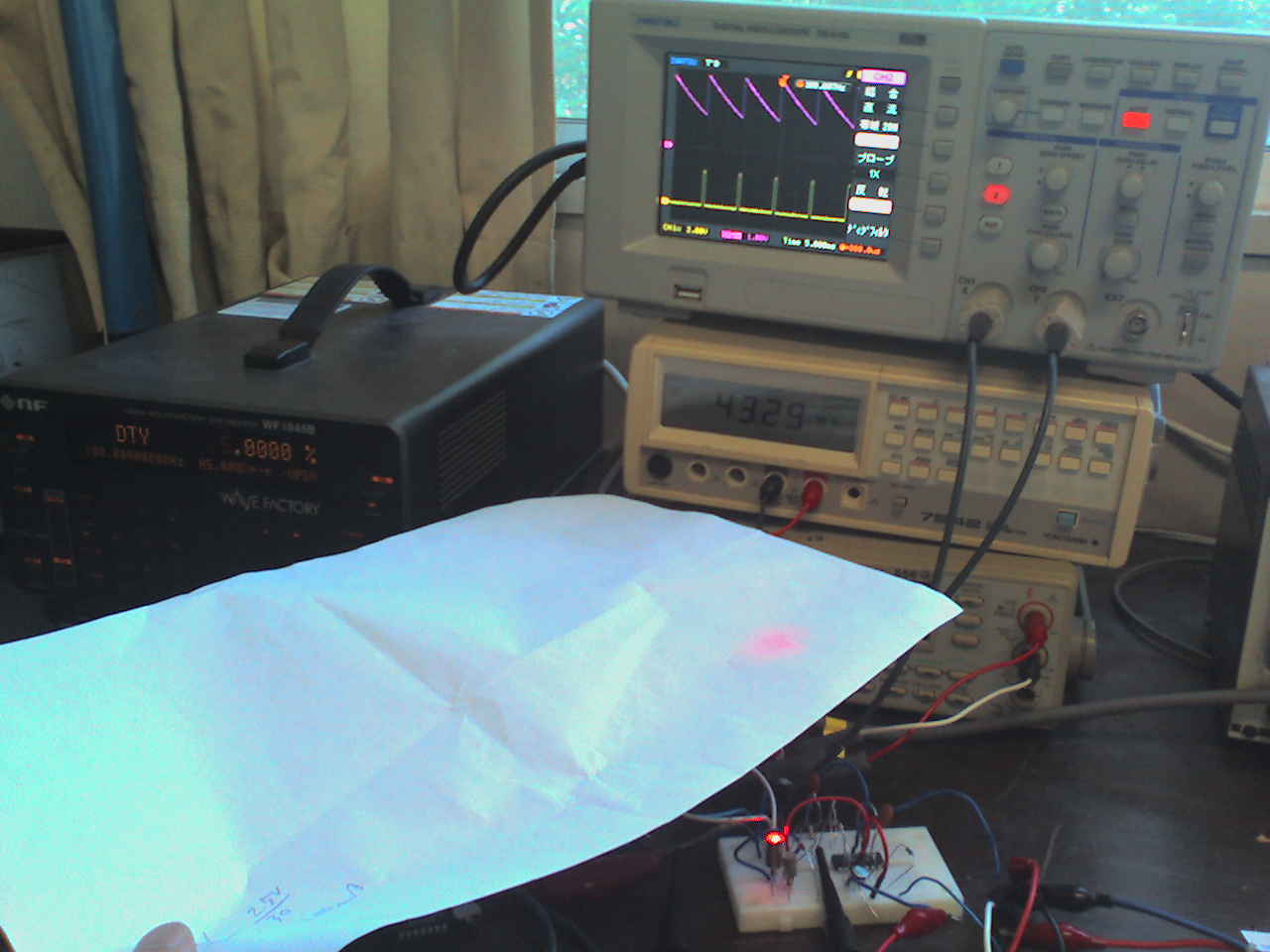
3)バックグラウンドの影響が大きいようなので,光りをパルス化してバックグラウンドの影響を確認する実験.
4)可視,赤外,LED,フォトダイオードペア,反射型フォトセンサなどで同様の実験.
4)長距離検出するには,光パワーをあげなければならない,ということで,光源をパルス駆動で定格以上の電流を流して応答を見る実験.
5)パルスの大電流が電源へのノイズ源になってしまうので,電解コンデンサと抵抗(チョーク?)でLEDの駆動電源をわける.
6)電解コンデンサによるパルス駆動なので電圧レベルの変動を考慮して,オペアンプの出力をホールド.
7)A/Dコンバータの変換時間を考慮して,センサの応答速度とパルス幅,デューティ比の検討.
と実用性を上げるために順に回路素子を追加していったら,いわゆる(森永様の)Basicmouseと似たような回路になりました.
結局,行き着くところは同じでした...
でも実験したおかげで,少し手を抜ける場所や,工夫すべき点などは見えてきました.
-----------------------------------
6.2Vのツェナーダイオード.
手元にあった単電源OPAMPの出力がVCC-1.5V=3.5Vまでしか振れないので,
光センサで距離計測するときダイナミックレンジが取れません.
なので,OPAMP注文するかと思ったのですが,手元のパーツをいろいろ探してたら,
ちょうど6.2Vのツェナーがありました.
これでOPAMPの電源をとれば出力も5V近くでるし,マイコンと電源が分離されるので,
ノイズ対策にも一石二鳥!という,行き当たりばったりで次へ進んでいいのでしょうか・・・?
ジャンル別一覧
人気のクチコミテーマ
-
-

- 新製品発売情報・予約情報
- 急いで!!本ズワイガニがWクーポン…
- (2024-11-28 01:21:10)
-
-
-

- パソコンニュース&情報
- 【Copilot+ PC】ノートPC「LAVIE NEX…
- (2024-11-29 12:35:14)
-
-
-

- いいもの見つけたよ
- 【宝福一】健康酢でアレンジレシピ
- (2024-11-27 00:00:27)
-
© Rakuten Group, Inc.