

左手法,拡張左手法
左手法ハーフサイズマウスのプログラムの続き,左手法を作りました.
マップ作成はまだです.
一区画ごとに止まって左手法で走らせるのなら,
左手法のプログラムと走行プログラムを別に作れるので簡単ですが,
区画ごとに止まらずに直線は高速のまま走らせるようにプログラムしました.
その分,判断が入り組んでます.
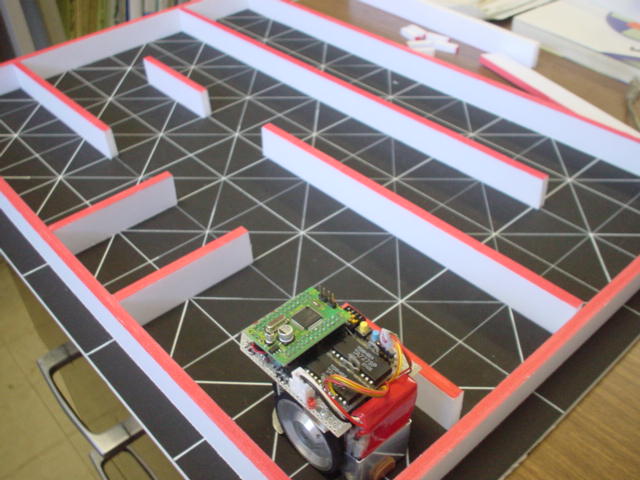
加減速,旋回を繰り返すと誤差が大きくなってしまい,壁にぶつかってしまいます.
もう少し細かな位置制御が必要なようです.
調整途中の動画,途中で壁にぶつかります.
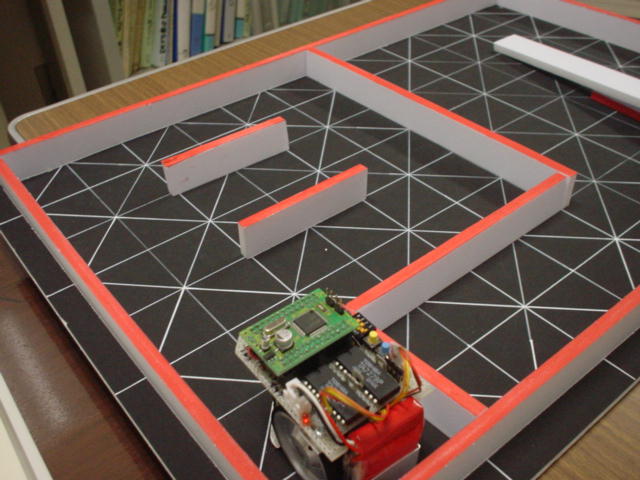
少し調整を加えて,直線の多い迷路にしてみた動画.
----------------------------------
拡張左手法
ハーフサイズマウスのプログラムの続き,マップ作成有りのいわゆる拡張左手法を作りました.
走行動画を見ると分かりますが,ぐるっと1周したあと,未探索部分を探索し,
スタート位置に帰って停止します.
拡張左手法の動画はこちら.
さて,次はいよいよ最短走行!
----------------------------------
ジャンル別一覧
人気のクチコミテーマ
-
-

- 楽天アフィリエイト♪
- lilizzhoumax リアルなミツバチのぬ…
- (2024-11-30 08:24:15)
-
-
-

- iPad
- iPadって中古で良くない?
- (2024-09-10 12:00:19)
-
-
-

- パソコンを楽しむ♪
- PC用オーディオラックの棚増設
- (2024-11-20 23:27:15)
-
© Rakuten Group, Inc.