

設計例 その3
4ビットCPUの設計 その3
ここでは,8ビットCPUのK-COMを元に,4ビットCPU設計を行う.命令長は8ビットのままとし,図1に示すように4ビットのデータを命令レジスタに2回に分けて読み込むことにする. 機械語の構成は8ビットK-COMと同じである.4ビット版K-COMの全体の構成を図2に示す.
図1 4ビットCPUの命令構成
図2 4ビットCPUの構成
命令の読み出し方法が変わったため,フェッチおよび実行サイクルは図3に示すように変更した.
図3 コントローラの動作
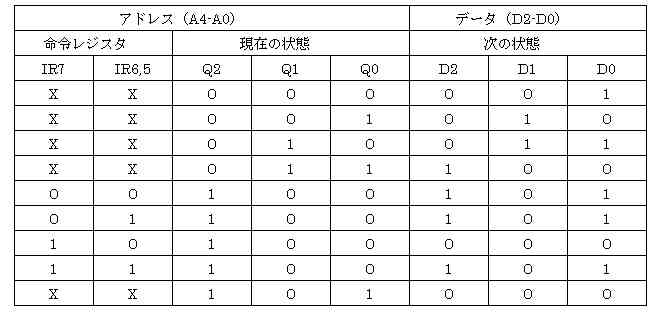
この場合,コントローラの回路も変更が必要となる.全部でS0からS5までの6サイクルあるので,3ビットの記憶素子が必要となる.K-COMの状態遷移回路はPROMとD-FFにより作成されていたが,PROMのアドレスは5ビットしかなく,命令コード3ビットと記憶素子3ビットを入力することはできない.そこで,命令コードの冗長性から2ビットにエンコードして状態遷移ROMの設計を行った.具体的には,命令の種類によって実行サイクルが1サイクルと2サイクルに分岐する部分のみの検出を行えばよい.IR7が0なら演算命令で実行サイクルは2サイクル,IR7が1でIR6の否定とIR5のANDが1の時にST命令実行で2サイクル,それ以外では1サイクルとなる.以上から状態遷移ROMの真理値表を表1のように設計した.
表1 状態遷移ROMの設計
そのほか,制御信号にも若干の変更がある.命令レジスタを2回に分けて読み込む際,2個のレジスタを4ビットずつ用い,それぞれのCE信号を制御したが,制御信号出力用のROMのデータバスにも余りがない.そこで,K-COMの命令レジスタのCE制御信号と状態遷移回路のD-FFの出力を組み合わせて2個のレジスタをそれぞれ制御するようにした.
フェッチサイクル制御用ROMの回路も変更した.フェッチにはS0からS3までの4サイクルの出力が必要なため,ROMのアドレス信号を変更し,アドレス0,1,2,3までを有効とし,8ビット版K-COMのS0,S1,S0,S1状態の制御信号を順に出力するようにROMデータを追加した.
以上の変更を加えて作成した4ビットCPUの全回路は図4である.
図4 4ビットCPUの全回路
CircuitMaker用回路データのダウンロード
ジャンル別一覧
人気のクチコミテーマ
-
-

- デジタル一眼レフカメラ
- 今ならまだ買える!Nikon 一眼レフカ…
- (2024-11-10 10:56:12)
-
-
-

- パソコンサポーターがすすめるパソコ…
- ◎新品 デスクトップパソコン HP 液晶…
- (2024-10-04 11:38:18)
-
-
-

- パソコンを楽しむ♪
- PC用オーディオラックの棚増設
- (2024-11-20 23:27:15)
-
© Rakuten Group, Inc.