

試走会・大会参加まで
今,アキバのホテル.がんばってソフト書きます.
室内で個別に動作確認してたのですが,外ではいろいろと不具合発生.
できる範囲でプログラムの確認をして,バッテリーが切れた後はGPSのログ取り.
課題はいろいろ分かったのですが,あと3日でどれだけできるか.
----------------------------------
つくばチャレンジ,ロボット運搬
メーリングリストで遠方より参加する際のロボット運搬の話が出てますが,
私どもの場合・・・
まず分解↓
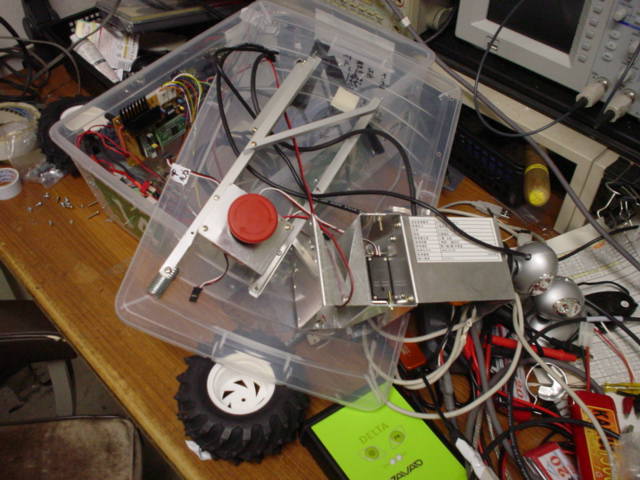
箱(ボディ)詰め↓

機内持ち込み可能な大きさのスーツケースに入れて,機内持ち込み.
前日,ホテルで組み立てて,
当日の朝,脇に抱えてつくばエクスプレスに乗車.
----------------------------------
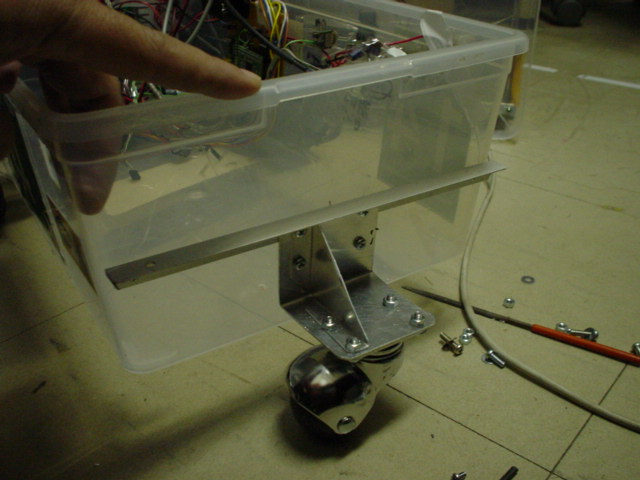
キャスター周りの補強
キャスターを付けていた後従輪の強度がなくてたわんでいたために,直進の走りはじめに
角度がずれる問題があったので,写真のように補強しました.
3倍くらい強度が増したようでわずかな重量増で結構効果がありました.
試作のまま本番を迎えますが,軽くて持ち運びも便利だし,必要なものは積んであるし,
来年もこのボディでいこうかと考えています.
----------------------------------
修復不可能なトラブル発生
つくばチャレンジのロボット運搬の際,大切な部分が破損.
面倒がって不安をほっといたのがまずかったです.
工具も,交換するICもなし,棄権か・・・?
----------------------------------
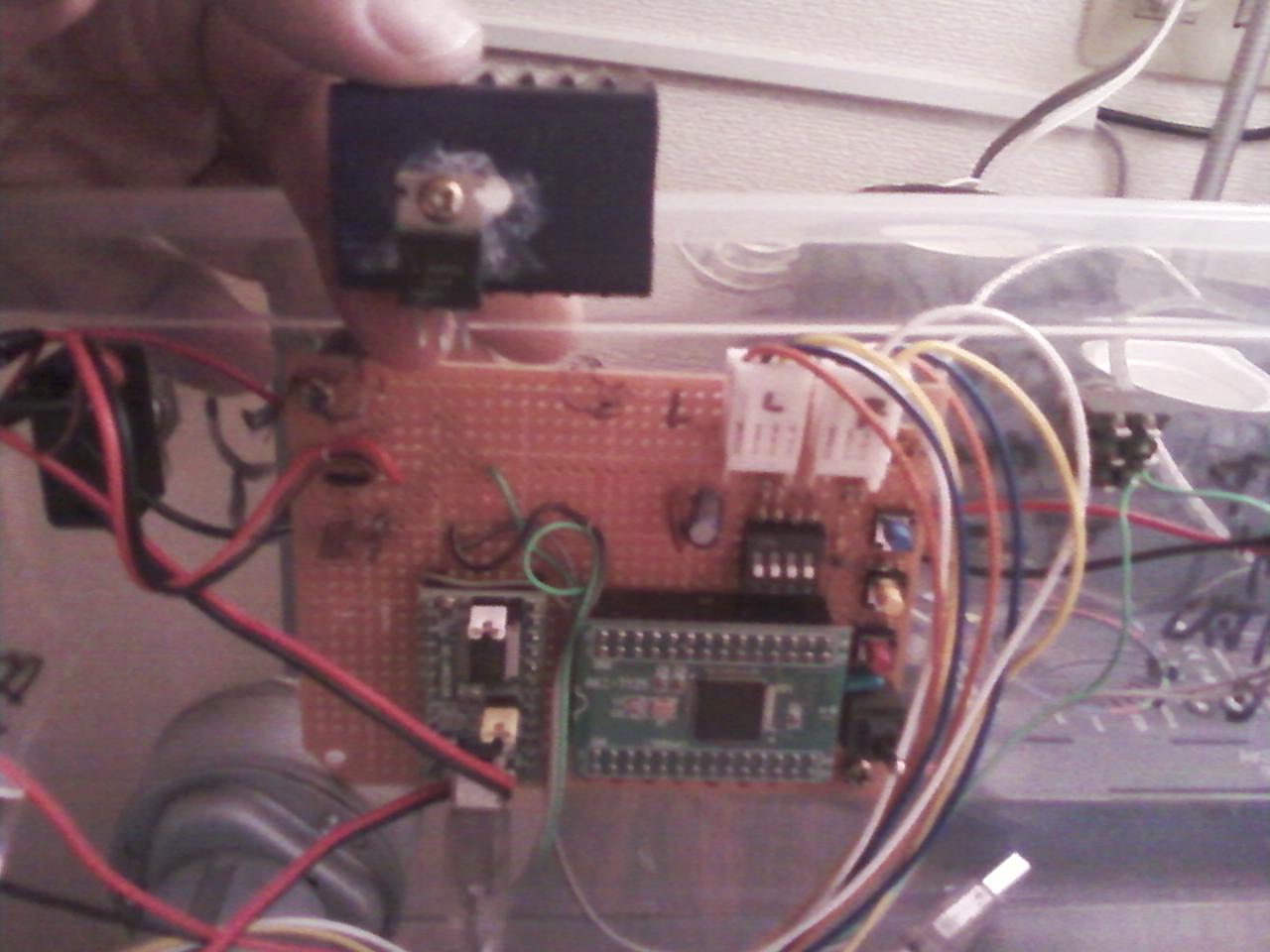
電源はちゃんと作りましょう
荷物を開いて,落ちていたのは3端子レギュレータ.
根元からポキンと折れていました.
大きな放熱板をつけていたので繰り返しストレスがかかって折れてしまいました.
気にはなっていたのでワイヤーで2箇所結んで動かないようにしていたのですが,
移動の時の内部に積んだ荷物の衝撃でしょうか.
交換部品もないし,半田ごても持ってきていないし,どこに売っているかも分からないし,
買いにいく時間もないし,途方にくれましたが,
いろいろ考えたらモータドライバユニットから5V100mA電源が出ているのを思い出しました.
サーボなどいろいろ動かすつもりで5V1Aのレギュレータをつけていたわけですが,
この際しょうがない,ということでサーボへの電源線ぶち切りました.
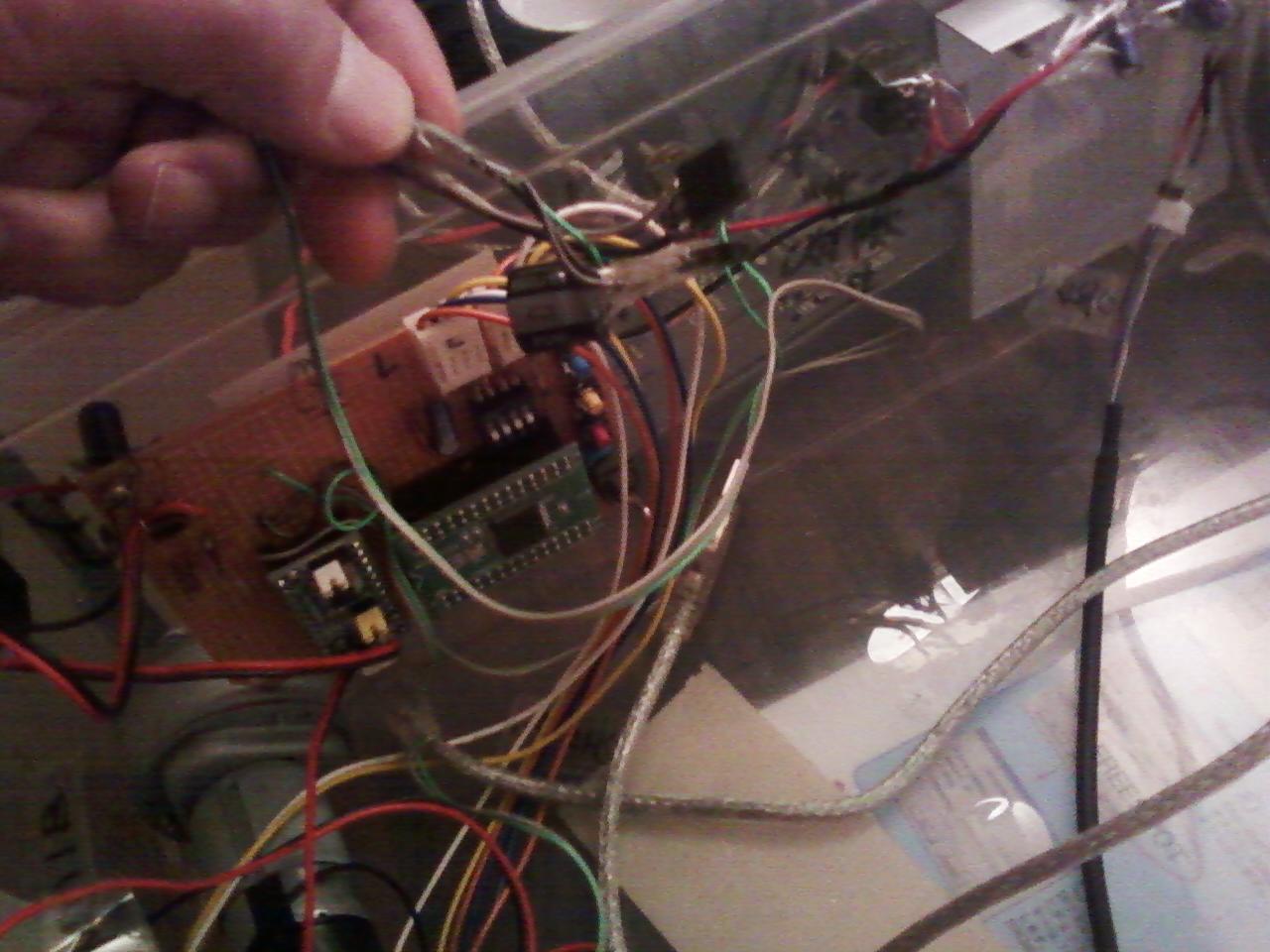
マイナスドライバーを持ってきていなかったので(機内持ち込みできないので),
針金で細工.小さなラジオペンチで先をつぶしてマイナスドライバーの代わり.

こんな感じでモータドライバユニットから電源を取りました.
サーボは使えなくなりましたが,なんとか代替措置ができました.
おかげでプログラムを見直す時間がなくなり,お疲れモードで就寝.
放熱板との機械的なストレスで電源ICの足が折れることがあるのちゃんと作らないといけない,よく聞く話ですがまさか大会本番で自分のロボットでそんなことが起こるとは思いませんでした.
----------------------------------
つくばチャレンジ,参加のまとめ
トライアル走行は通過できずにリタイヤでした.
あれこれトラブって結局まともな調整ができないまま1回目のトライヤル走行.
1回目はスタート直後に旋回と前進,障害物回避を繰り返し,
ゴール地点から1メートルくらいの範囲できょろきょろしてリタイヤ.
プログラムを見直すと大きなバグあり,角度の計算値を書き込む変数を間違っていて,
それを参照して角度を読み間違い,正しいルートに乗ろうとしても角度と場所が
合わずに迷っていました.
ほかにも,一定距離以上に進んだときに方位を更新するところで,方位の誤差を
少なくするために必要以上に距離をとっていて方位がうまくよめなかったり,
直進のエンコーダの左右の補正値がお直進のつもりがわずかに曲がったり,
プログラムをいろいろ作り直したところの動作確認ができていなかったので,
プログラム上のバグを3つくらい含んだまま走ろうとしていました.
2走行目はそれらを修正して臨もうとしたわけですが途中でノートPCのバッテリー切れ.
電源がないので最小限の時間で既知のバグをつぶして調整をやめて2回目の走行に臨みました.
2回目はそれなりにプログラムどおりに走り,障害物を回避しながらウェイポイントをたどりながら走行しました.高性能なGPSを使っていたので位置精度は高かったのですが,
しかしなぜだか補正の間隔が短く,ちょっと進んでは補正を繰り返してしまいます.
どこかの補正を加えるしきい値(たぶんGPSにより計算した方位の誤差のしきい値)が
狭すぎたようです.
トライアルゴールには向かっていくも時間が厳しい状態でした.
途中でGPSの電波がおかしくなったようなところがあり,そこでいったん角度を失い,
その後後ろから来たロボットと干渉しようとし,袋小路に頭を突っ込んで抜けなくなり,
障害物を回避するため細かい動作を繰り返していたためGPSによる方位の補正ができずに
方位を見失い,そのままリタイヤとなってしまいました.
結論,GPSの精度がよければGPSとLRFだけでそこそこいけるまではできましたが,
走りこみでパラメータ調整しないとだめ.
仮にトライアルクリアしたとしてもGPSだけではキープレフトで先を進むのは難しい.
そのほかの方法を組み入れないといけない.
個別の状況に対応したルーチンとして,
指定角度強制回転
指定距離前進
前の障害物(壁など)に指定距離まで接近停止.
前±25度以内で最小幅の孤立障害物に接近停止.
正面近傍の孤立障害物から指定角度に向けるで回転
壁に対して垂線が指定距離(m)になるまで直進で近づく
壁に対して垂直に向く
右回転で左壁に平行に向く
左回転で右壁に平行に向く
左壁に平行に指定距離前進
右壁に平行に指定距離前進
直進して左右壁切れを検出して停止
など作っていたわけですが,動作が完全に確認できていなかったのでトライアルでは
使わず,使われないまま終了.
そのほかにも,
USBカメラ画像を用いた画像処理による位置補正,角度補正
3D加速度センサ,磁気センサ,ジャイロを使った補正や角度の補正など考えていたわけですが,
時間がなくなり終わりでした.

----------------------------------
本走行観戦と技術交流会と技術交流会その2
完走したチームの皆様,おめでとうございます.
参加した皆様,お疲れ様でした.
技術交流会ではいろいろと勉強させていただきました.
こうやればできるというのは教えて頂きましたが真似しても面白くないので,自分達なりの方向性で来年もチャレンジしようと思いました.
さて,明日からマイクロマウス全国大会,
今夜ははしごして事前の技術交流会に参加して今ホテルに帰ったところです.
----------------------------------
その後,
つくばチャレンジのロボットも細かな改造
ボールキャスタをダブルにしました↓

ジャンル別一覧
人気のクチコミテーマ
-
-

- パソコンの調子が悪い
- iPod classic修理/大容量化 下関市…
- (2024-11-22 05:30:10)
-
-
-

- 【楽天市場】☆☆楽天おかいどくお買い…
- 32,450円 ポータブル電源 リン酸鉄 …
- (2024-12-03 20:06:19)
-
-
-

- iPhone
- 2024 全面保護 360度 フルカバー 耐…
- (2024-12-03 09:53:26)
-
© Rakuten Group, Inc.