

KHR-1♪
----------
2月5日 逆運動学2.1 実装中♪
逆運動学2.1を実装中です。(^-^)v
一つ前の逆運動学2.0は、前回大会や、onPCでJOE2に使っていたのですが、
今回は、それを2軸直行じゃなくて、ピッチ軸とロール軸がオフセットしててもOKなものに拡張中。
2.0作成中から、拡張はかなり簡単だろうと思っていたのですが、
やっぱり簡単でした。(^^;;; だから、3.0じゃなくて2.1なのです。
で、実装した結果をチェックする実験台が、そう、KHR-1♪
共同開発者の斉藤さん(機体担当)からお借りしたのですが、
こいつの背中に共同開発のボードを載せて実験する予定です。

----------
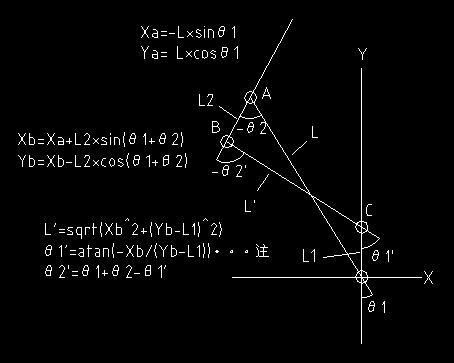
2月8日 逆運動学2.1 エクセルでの検証完了♪
逆運動学2.1の「.1」の部分が、下の図です。(^-^)v
図を描いて式を立てるまで、小一時間・・・。
エクセルでの検算では、θ1’の計算部分で領域がちょっと引っかかったけど、
問題はそれだけで、あっさり検証も完了です♪
これで2軸直行にこだわる必要もなくなるのかな?
ちなみに、この図はonPC2で頂いたインベンタ9に付属のAutoCADメカニカルで書いたのですが、
いつも使っているAutoCADとかなり勝手が違って・・・。(^^;;;
感覚的にはインベンタの色が濃いですねぇ。ごまかしが効かないというか。
そうそう、あと、通勤電車の中で、C#の入門書も一通りナナメ読みが完了。
思想というか、どんなものかはなんとなく理解・・・。(^^;;;ホントカ?
あとは、実践あるのみですっ!
でも、まずは、7046をKHR-1の背中に積むべく、拡張ボードを設計しないと。
メモ:KHR-1のマニュアルの中に赤ラベル(サーボ)について、
位置パルス取得後は100μs以内にマイコン側を出力に戻せと書いてあった・・・。
うむ~。やっぱり念のため御尻を拭いて回るか。
----------
2月14日 3連休の成果は・・・。
なんだか、ずっと、KHR-1用のボード作ってました。
なかなかナットクできなかった。しかも2箇所ミスが残っているし。
動作には関係ないから、このままいこう。(--;
タイムリミットがあったのですが、動作確認中にテスターで回路をショート、
ブースター7が燃えて、パルス分配用のICも壊れた・・・。で、心も折れた・・・。
共同開発者の方に迷惑かけてしまった。ごめんなさい。
予備の部品に取り替えて、どうにか完成。
火曜日の夜、受け渡し予定です。

-----------
2月16日 スクリプト
昨日は、夕方の7時から打合せなんてヘビーなお仕事だったのですが、
帰りの電車や家のお風呂の中で、MTSや、スクリプトや、コマンドについて、いろいろ考えてました。
共同開発のベース機体がKHR-1になって、7046用I/O拡張ボードの設計も終わったので、
次は、PCとの連携を考えないといけない。
お手本となるのは、KHR-1に搭載されているRCB-1のコマンド類なのですが、
なにから作れば良いのかな? やっぱり、ホームポジションからでしょ~。
あと、MTSはなかなか便利な機能なのですが、モーションのコーディングやメモリ効率、
PCとの連携を考えると色々問題があるのも事実。
一方、RCB-1を見た感じだと、PCとの連携はコマンド形式以外ありえない。
とすると、やはり、モーションはスクリプト形式で作成して、コマンドを使ってマイコンへ転送、
実行時はスクリプトをMTSへ展開して実行って感じかなぁ。
スクリプトって形にすると、一気にモーションの自由度が上がる気がします。
あと、それとは別に、スクリプトなら複合命令なんて感じで動作も作れるかな?
例えば、メインアクションが前進で、サブアクションが上体をひねって腕を振るとか・・・。
Visionが搭載している動作の合成とは、ちょっと違う感じだけど、ま、そんな感じ。(^^;;;
----------
2月17日 2-Wire Serial EEPROM♪
本当なら、マイコンとPC間通信のコマンドリストを作成しているハズなのですが・・・。
なぜか、シリアルEEPROMのお勉強してます。(^^;;;
昨日の夜にふと、以前秋月で購入したEEPROMが出てきて、
付いてきた1枚っきりのデータシートはなんだこれ~? って感じで、
う~ん。やっぱり、KHR-1みたく、ホームポジションくらいは記録できると良いかな~って。
じゃ、テストして見ますか~って。(^^;;;
で、さっそくネット検索。
とりあえず、なにも考えず(知らず)に掴んだのがATMEL(アトメル社)製の24C256だったから、
まずは、秋月のHPからデータシートをDL♪ もちろん英語だけど、中学生レベルでOK。
そういえば、ルネサスのHPのR8C/15のアプリケーションノートにも
標準入出力端子を使ったI2Cのソフトウェアドライブのサンプルがあったなぁ~って感じで、こっちもDL。
では、まずは基本から。
「Electrically(電気的に) Erasable(消去可能) and Programmable(プログラム可能) Read(読み込み) Only(専用) Memory(メモリ)」とは、そのまんま。(^^;;
あと、256kって、256kBits = 256/8 = 32kByteなのね・・・。(--;;;
アトメルのデータシートには、2線シリアルって書いてあるけど、
それって、ルネサスで言うところのI2C(アイ・スクウェア・シー)バスと同じですね。
2線とは、1本のクロック線(データを送受信するタイミングを示すパルス)と
1本の双方向データ線を使うってことらしい。
双方向ってことは、赤ラベルと一緒で、クロック線、データ線、共にプルアップが必要となっています。
あと、完全同期なので、普通のシリアル通信のように通信周期に追い掛け回されることもないのかな?
通信を一時停止したければ、クロック止めればOK?
だから、気軽にソフトウェアドライブもできちゃうのかな。
標準ポートが2本余ってたら使えるってのは魅了ですよね。
----------
2月20日 面白いこと。
ここ最近HPを巡回して面白いって思ったこと。
1.足裏センサ
Jinさんが足裏センサを使っているみたいですね。
私も第8回大会には投入したいのですが、この所のジャイロの標準化を考えると、
第7回大会でも差別化の意味で複数の方々が搭載して来ると思っています。
ZMPさえ理解していれば、使うのは難しくないとは思っていますが・・・。
2.音声
R-Buleの吉村さんが音声を搭載しようとしていますね。
あれはRioだと思うのですが、レコーダ機能が付いているので、
エンコーダが必要ない点でベストですね。
価格も生産が終わっているのでかなり落ちています。
ロボットに搭載するなら今が購入のチャンスかな。
う~ん。第7回大会はパスすることになりました。
ワールドレコーズの影響を考えると、この大会はいろんな意味でターニングポイントになりそうですね。
是非とも経験した方が良いと思います。参加者の皆さん、頑張って下さいね。(*^-^*)
----------------------
追記:
ちなみに、ちょっと気になって調べてみたら、
声優の声にも、効果音にも、当然、著作権があります。
ただ、音楽はJASRACによって厳しく管理されていますが、
その他は、それほどではないと言える・・・かも知れません。
ちなみに世の中には著作権フリーと呼ばれるソースがいっぱいあります。
音楽から、声、効果音まで、検索すると山盛りです。
著作権を気にしたくない方は、こちらを使われることをオススメします。
----------------------
追記2:
老婆心かも知れませんが、大会でリポ電池を使われる方は、
くれぐれも爆発など無いように・・・。(^^;;;するらしいから
(もっとも公開されている爆発に関する情報は殆んどが、過充電と、墜落によるもの)
少なくとも外から剥き出しの電池が見えないようにはして下さいね。
リポ禁止になるばかりか、大会そのものが危なくなるかも!?
----------
3月1日 う~ん。
で、週末の進捗はと言うと、
1.共同開発者の方から送られてきた、C#のシリアル通信関係のプログラムをお勉強。
バイナリ形式でコマンドを送れるように、ちょびっと改造。
2.RCB-1(KHR-1の標準ボード)を参考に教示に必要な基本コマンドの仕様を決定。
やっぱりホームポジションは1箇所ずつ設定できる方が良いでしょう。
3.赤ラベル対策(7046のインプットキャプチャにハマル・・・(--;)
----------
3月2日 ハードか? ソフトか?
ここ数日ハマってた赤ラベルと言うか、7046について書きますかね。
まず、症状としては、MTU0のインプットキャプチャがまったく動作しないというものでした。
最初は、プログラムの間違いにも気づかず、しかも、MTU4と勘違いしていて、変な知らないレジスタでもあるのか~?
なんてハードウェアマニュアルを検索しまくって、次にパルス分配用ICの不具合か? と思ったのですが、
マイコンの端子から直接取っても不具合は変わらず、IC壊しちゃった説は消えて、
う~ん。と悩んだ末に、自作ボードを眺めていると、あっ、動いてないのはMTU0だって気づいて、
そこからはわりと早く、TIORに設定するのは、0xffじゃなくて、0xaaだってことに気づいて、
(MTU3やMTU4は0xffでもOKだったのだ。MTU0が微妙に違った・・・)
その後は、もしかしてとTMDRも設定するように変えたら、すんなり動いた・・・。
(TMDRは通常動作に設定するのだけど、初期値のままだからあえて設定する必要もないと思ってた)
解決に要した時間は、ざっと6時間・・・。(--;;;ふがいなひ
で、やっと24チャンネル全てのポジションキャプチャが可能となったのだけど、なんか変・・・。
なにが変かと言うと、サーボに入力したパルス幅に対して、戻ってくるパルス幅が約100μs程長いのだ。
角度にすると11度程度。これはちょっと変です。(ーー;;;
う~ん。回路か? ソフトか? 普通は負荷がかかってなければ全く同じパルスが戻ってくるハズ。
まぁ、理由がなんにせよ、どうも一律100μs長いなら、ソフト側で調整すればOKかな。
あっ、でも、入力が2300μsの場合のみ、戻り値がちょっと変・・・。調整しても20μs(2度)程度ずれてる。
う~ん。奥が深いぜ赤ラベル。間違ってるのは、ハードか? ソフトか?
----------
3月4日 エラー処理
さてと、KHR-1の方は、マイコン側にコマンド対応機能を追加中。
PCと連携して教示でモーション作成できるくらいの基本コマンドは搭載できました。
あと、それに加えて、通信エラー処理も簡単なものを載せて、もうちょっとで一段落です。
そしたら、共同開発者の方にPC側のソフトをビシバシ作りこんでもらって、
その間に、私はスクリプトのフォーマットを作ると。
----------
以上
ジャンル別一覧
人気のクチコミテーマ
-
-

- ニュース関連 (Journal)
- 「プラチナバンド」 携帯電話の電波…
- (2024-11-30 06:57:10)
-
-
-

- お買い物マラソンでほしい!買った!…
- 楽天お買い物マラソンで複数ショップ…
- (2024-11-30 20:30:09)
-
-
-

- 楽天市場
- SS_ \10%OFF+ポイント2倍+送料無料…
- (2024-12-01 15:17:02)
-
© Rakuten Group, Inc.