

マイクロシリアルサーボjコントローラ
を使ってみました.
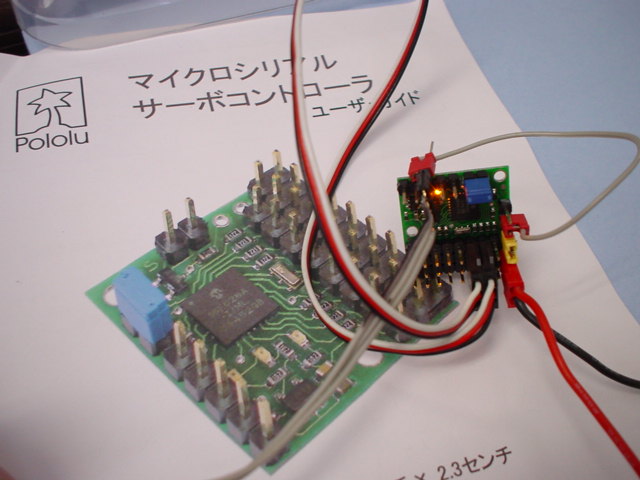
秋月のUSB-シリアル変換を使ってロジックレベルシリアル信号をPCから供給.
電源は,ボードにVCC-Vsjumperを追加して,サーボ用電源から供給して単電源動作.
プロトコル選択はジャンパーをつけたままにして,ミニSSC2モード.
サーボ1とサーボ2にサーボを2つ接続しました.
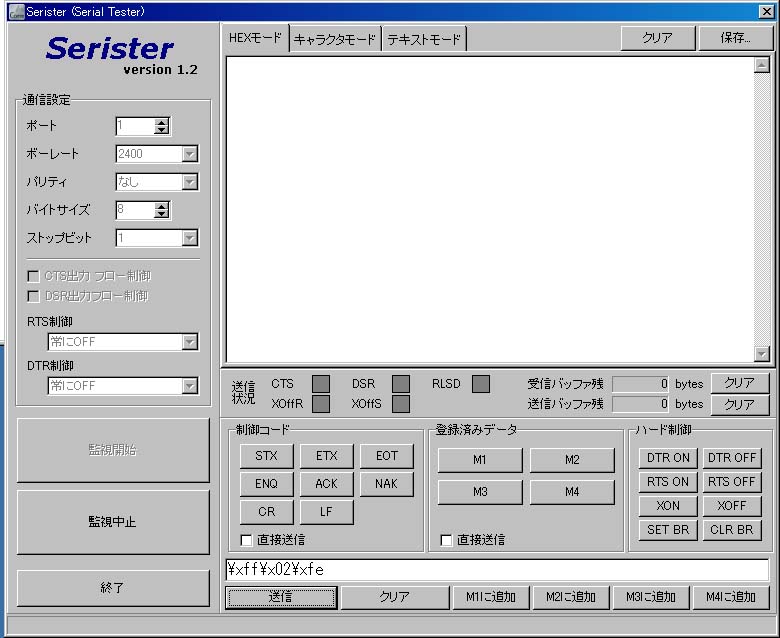
この状態で,PCからシリアルで3バイトデータを送るとサーボが動きます.
1バイト目はFFで固定,2バイト目はチャンネル数,3バイト目はサーボ位置.
通信にはVectorでダウンロードしたシリアル通信テスタ,Seristerを使いました↓
http://www.vector.co.jp/soft/win95/hardware/se423507.html
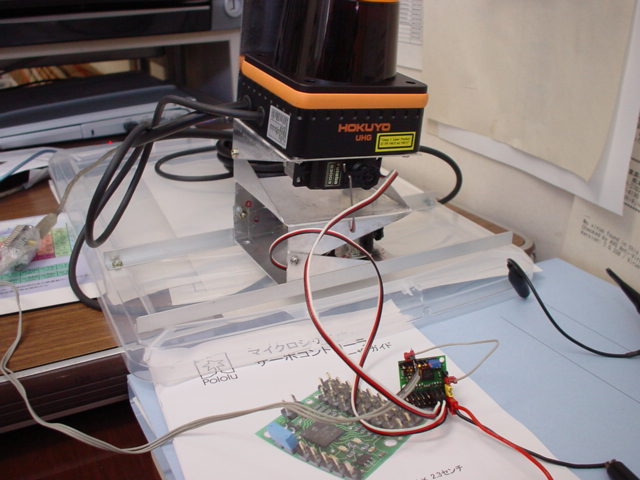
先日作ったレーザレンジファインダの傾き制御に接続したところ↓
2つのサーボがそれぞれ制御できました.
注意しないといけないのは,サーボが動くときに電圧が下がってコントローラが
誤動作することがあります.電源には十分な電流能力のあるものを使うか,
コントローラとサーボは別電源にしたほうが安全です.
ジャンル別一覧
人気のクチコミテーマ
-
-

- 楽天ラッキーくじ
- 楽天ラッキーくじ更新情報(2026/5/1…
- (2026-05-11 15:34:01)
-
-
-

- 楽天市場のおすすめ商品
- CAWAIIのシアーロングカーディガン2…
- (2026-05-14 22:56:43)
-
-
-

- パソコンサポーターがすすめるパソコ…
- ◎中古 デスクトップパソコン PC HP E…
- (2026-03-05 22:41:16)
-
© Rakuten Group, Inc.