

ボール&ビーム制御実験
ボール&ビームというのは制御分野ではメジャーな例題らしいですが,自分は専門外なので知りませんでした.
作ったのはこれ↓
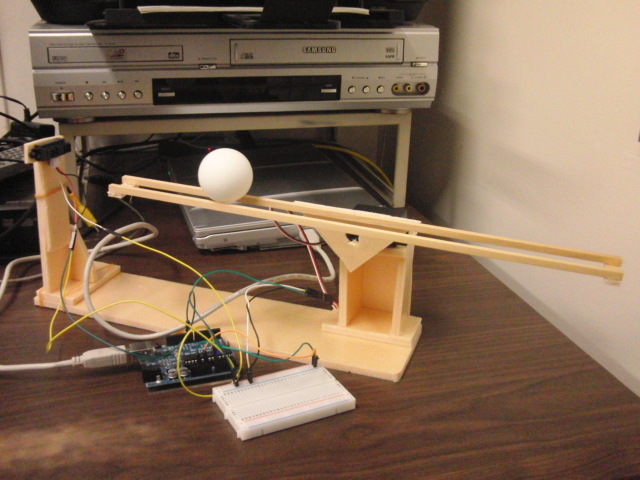
Arduinoでサーボを制御,測距センサでピンポン玉との距離を計測,身近にあったスチロール板を適当にホットボンドでくっつけて工作.センサの高さと距離は輪ゴムで固定しているので可変できます.
本体製作時間は1時間半くらい,以下の動画のプログラムも含めて3-4時間で出来ました.
動画その1(ON-OFF制御)
動画その2(比例制御)
動画その3(比例と微分制御)
完全に安定しないのは,測距センサの値がふらつくためです.
完全に安定するとボールが止まってしまって面白く無いので,あえてそのままにしています.
測距センサの計測周期に合わせて別周期で計測とスムージングした値を使うと多分もっと安定すると思います.
----------途中だけど,スケッチはこんな感じ----------
#include < Servo.h>
const int analogInPin = A0;
int servoCenter = 85;
int sensorValue = 0;
int posCenter=256;
float p=0, pp=0, i=0, d=0, pid=0;
Servo myservo;
void setup()
{
myservo.attach(9);
myservo.write(servoCenter);
delay(1000);
}
void loop()
{
sensorValue = analogRead(analogInPin;
pp=p;
p=-(sensorValue-posCenter);
i+=p; // I制御は使ってません
d=p-pp;
pid=p*0.04+i*0+d*0.04; // I制御は使ってません(係数0)
myservo.write(servoCenter+pid);
delay(200);
}
更に改良
昨日の続き.ピタっと止まるようにプログラム組みました.
やったのは,
タイマー割り込みを使ってPSDセンサの計測周期を制御周期と独立にしてスムージングによるノイズ除去.
センサ値の線形化
パラメータの最適化.
ピタっと止まってしまって面白く無いので,2通りの位置で10秒毎に切り替えるようにして動きを出しました.
その動画→ その4(2点の交互移動)
-------------- 改良したスケッチ --------------
#include < Servo.h>
#include < MsTimer2.h>
#define CENTERVAL 256 // センサ読みの線形化に使う
#define POS1 0.75 // 距離を2通り定義,
#define POS2 1.3 // 中心が1なので,左右で少し離れた2点
const int analogInPin = A0; // PSDセンサの出力をアナログポートにより計測
volatile int sensorValue = 0; // PSDセンサの読み
int servoCenter = 86; // サーボが水平になる値.
float posTarget=POS1; // 目標位置
float posCenter=POS1; // 制御対象を目標位置にゆっくり近づかせるための変数
int cnt=0; // 繰り返しの数のカウント
float p=0, pp=0, i=0, d=0, pid=0; // 制御パラメータ
Servo myservo;
// --------- スムージング関数定義 --------------------
float smooth(float cData, float pData, float factor){
return(cData*factor + pData*(1-factor));
}
// --------- PSDセンサ計測関数,タイマー割り込みで呼び出す -------------
void measPSD(){
sensorValue = smooth(analogRead(analogInPin),sensorValue,0.5); // 計測値はスムージングして使う
}
// ----------------------- セットアップ -------------------------------
void setup()
{
myservo.attach(9);
myservo.write(servoCenter); // サーボを水平に
// Serial.begin(9600); // 制御係数の確認のためにシリアル出力
MsTimer2::set(25, measPSD); // 25ms 周期でタイマー割込みをかけてPSD計測
MsTimer2::start();
delay(5000); // 最初5秒サーボを水平に保つ
}
// ----------------------- メインループ ----------------------------------
void loop()
{
cnt++; if (cnt>50){ // 200ms×50回で10秒毎に位置を切り替えるためのカウント処理
cnt=0;
if (posTarget==POS1) posTarget=POS2; else posTarget=POS1; // 目標位置を切り替える
}
posCenter+=(posTarget-posCenter)*0.15; // 目標位置が急に変化するとバタツクのでなめらか処理
pp=p;
p=(float)CENTERVAL/(float)sensorValue - posCenter; // 比例値
i+=p; // 積分値,今は未使用
d=p-pp; // 微分(差分)値
pid=p*6+i*0+d*20;
myservo.write(servoCenter+pid);
// Serial.println(p);
delay(200); // 制御周期は200ms,早くするとバタついて球が跳ねる
}
ジャンル別一覧
人気のクチコミテーマ
-
-

- 楽天ラッキーくじ
- 楽天ラッキーくじ更新情報(2026/5/1…
- (2026-05-11 15:34:01)
-
-
-

- 携帯電話のこと
- Open RANの現在地と未来:楽天モバイ…
- (2026-05-11 08:00:06)
-
-
-

- Amazonマケプレ
- #タイムセール ロッテ コアラのマー…
- (2026-04-30 12:18:55)
-
© Rakuten Group, Inc.