Face mesh detection conceptsStay organized with collectionsSave and categorize content based on your preferences.
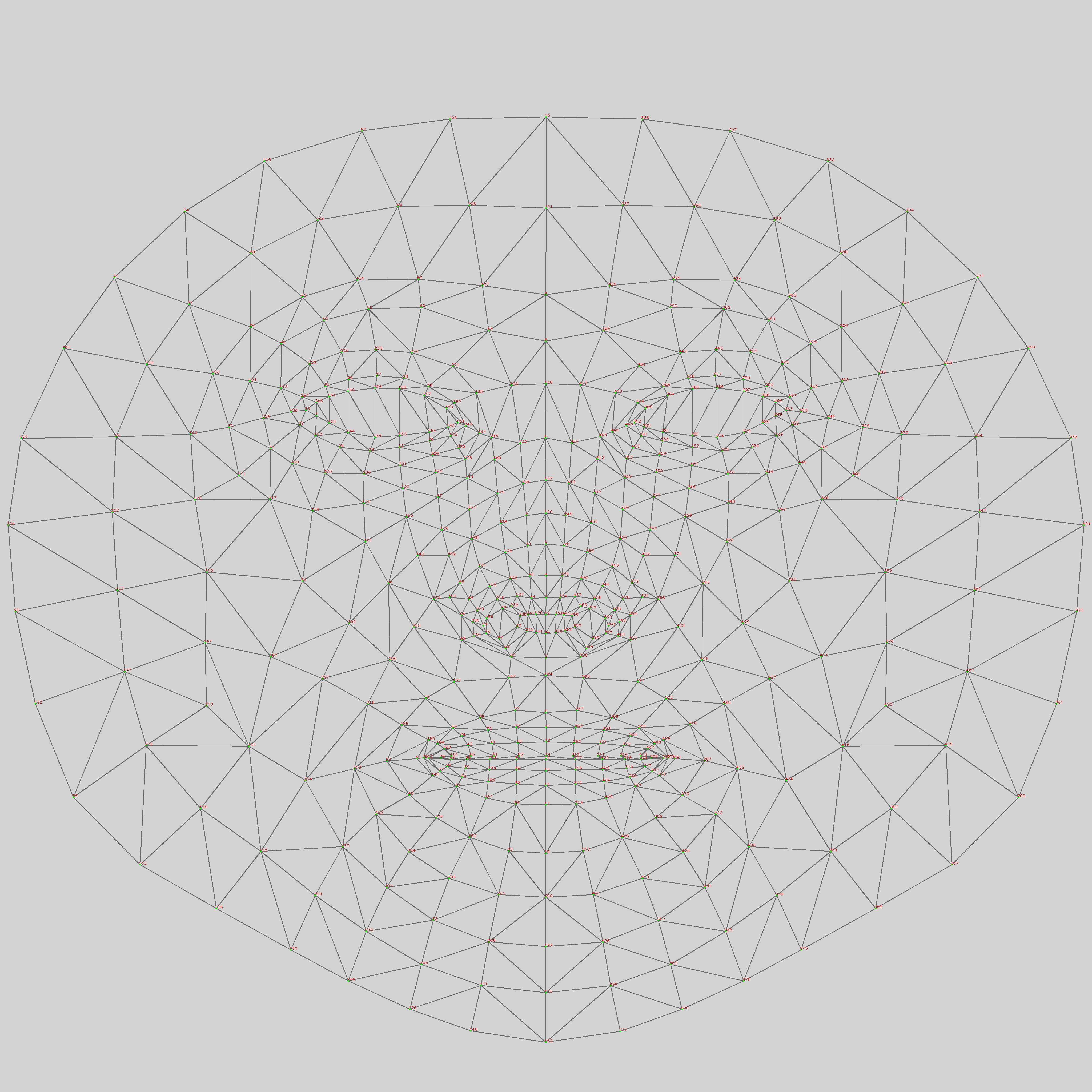
Face mesh info contains two parts:
468 3D points:Each point has a unique ID, ranging from 0 to 467,
associated with a fixed position on the detected face. For each point:
x and y are pixel coordinates of the detected face.
z is the depth info scaled to image size, such that z-values are more
negative when the face is closer to the camera. The origin is the average
depth of all 468 points.
Triangle info:This is used to represent a logical triangle surface in the
detected face. Each triangle contains three 3D points. For example, Points
#0, #37, and #164 construct a small triangle area between the nose and
lips.
[[["Easy to understand","easyToUnderstand","thumb-up"],["Solved my problem","solvedMyProblem","thumb-up"],["Other","otherUp","thumb-up"]],[["Missing the information I need","missingTheInformationINeed","thumb-down"],["Too complicated / too many steps","tooComplicatedTooManySteps","thumb-down"],["Out of date","outOfDate","thumb-down"],["Samples / code issue","samplesCodeIssue","thumb-down"],["Other","otherDown","thumb-down"]],["Last updated 2026-06-11 UTC."],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]