

全1253件 (1253件中 1-50件目)
-
パソコン関連 ラズパイ内向けサーバにつながらない
最近、定点カメラを動かしているラズパイがターミナルから接続できないことが続いた。本体にkeyboardとDisplayを接続するとちゃんと動いている。でも、SSHしても見えない。有線LANで接続しても、設定したIPアドレスでは接続できない。その状態で、本体に接続したDisplayの起動画面を見てみると、IPアドレスが違う! なんで?と思って設定方法を確認したら、HomeGateway側でMACアドレスを使って指定していたことを思い出した。ラズパイ側に設定はない。wlan0とeth0でアドレスは変わるんだ(まぬけ)。ということで、動いていないwlan0を使うように、raspi-configで設定したら動くようになった。これで多分大丈夫だろう。しばらく様子見。
2025.11.15
コメント(0)
-
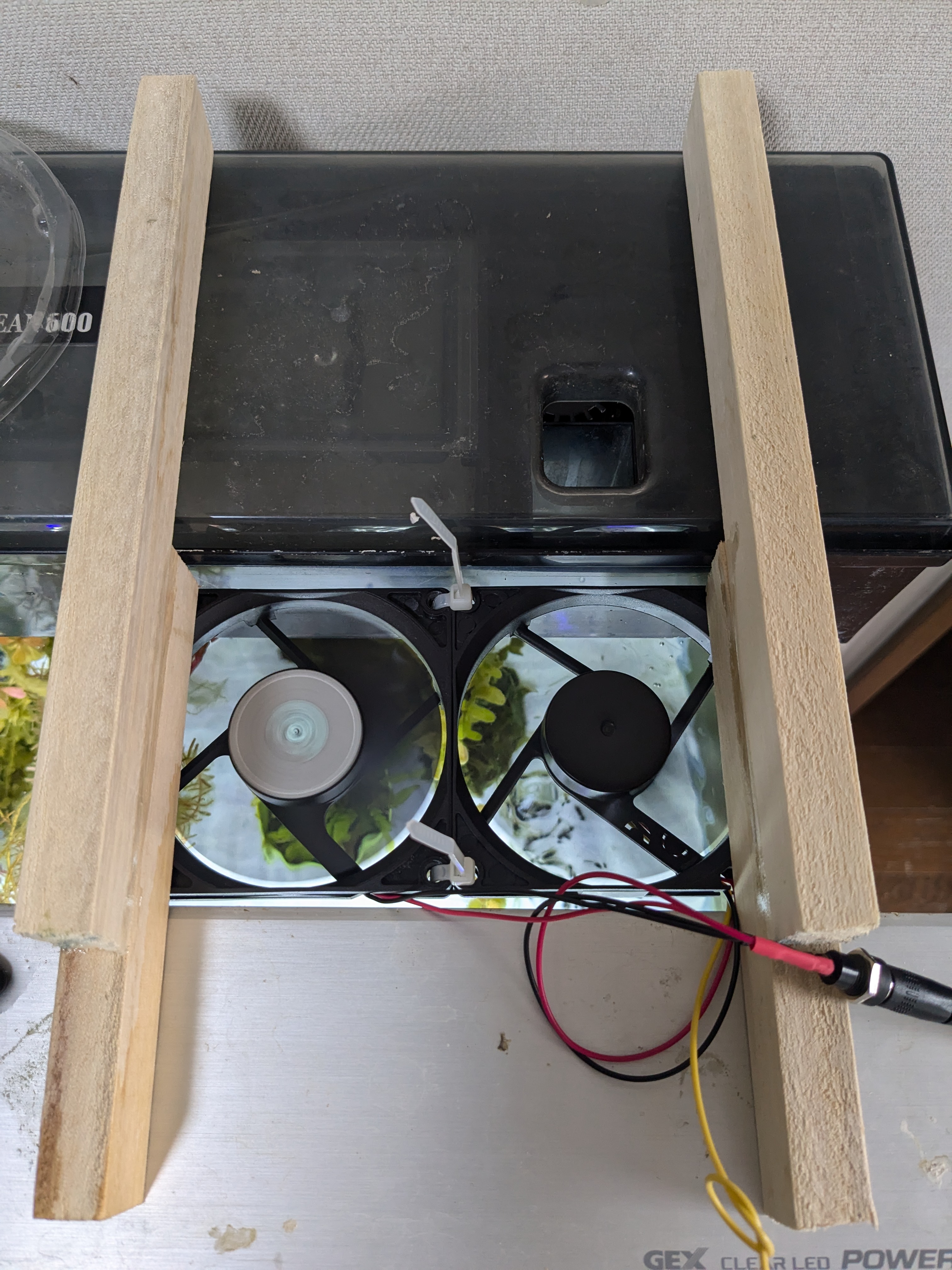
熱帯魚 最近の作業
自作2連ファンの片方が壊れたので買い直し。多分、軸受けが何らかの理由で固まってしまったみたいなので、厚みが増えるけれどボールベアリングタイプにした。ちょっと風、音ともに大きいので、1個だけにして運用中。コネクタがXHだったのでドローンの部品を使ってファン付のコネクタはそのままにした。ばっちり。薬剤が切れたので、CO2作り直し。2025/9/20更新、多分1か月は持っているはず。葉っぱを手入れしないとだめだなぁ、やっぱり赤いのは育たない。1階に小さい水槽を作って、小さいテトラさんを移した。これは大事かも、今度から小さいテトラさんを迎え入れるときにはこの方法で。小さい水槽のためのネットも買い足した、ストッキングタイプの深型、30cmx30cm程度の大きさが必要。
2025.09.21
コメント(0)
-
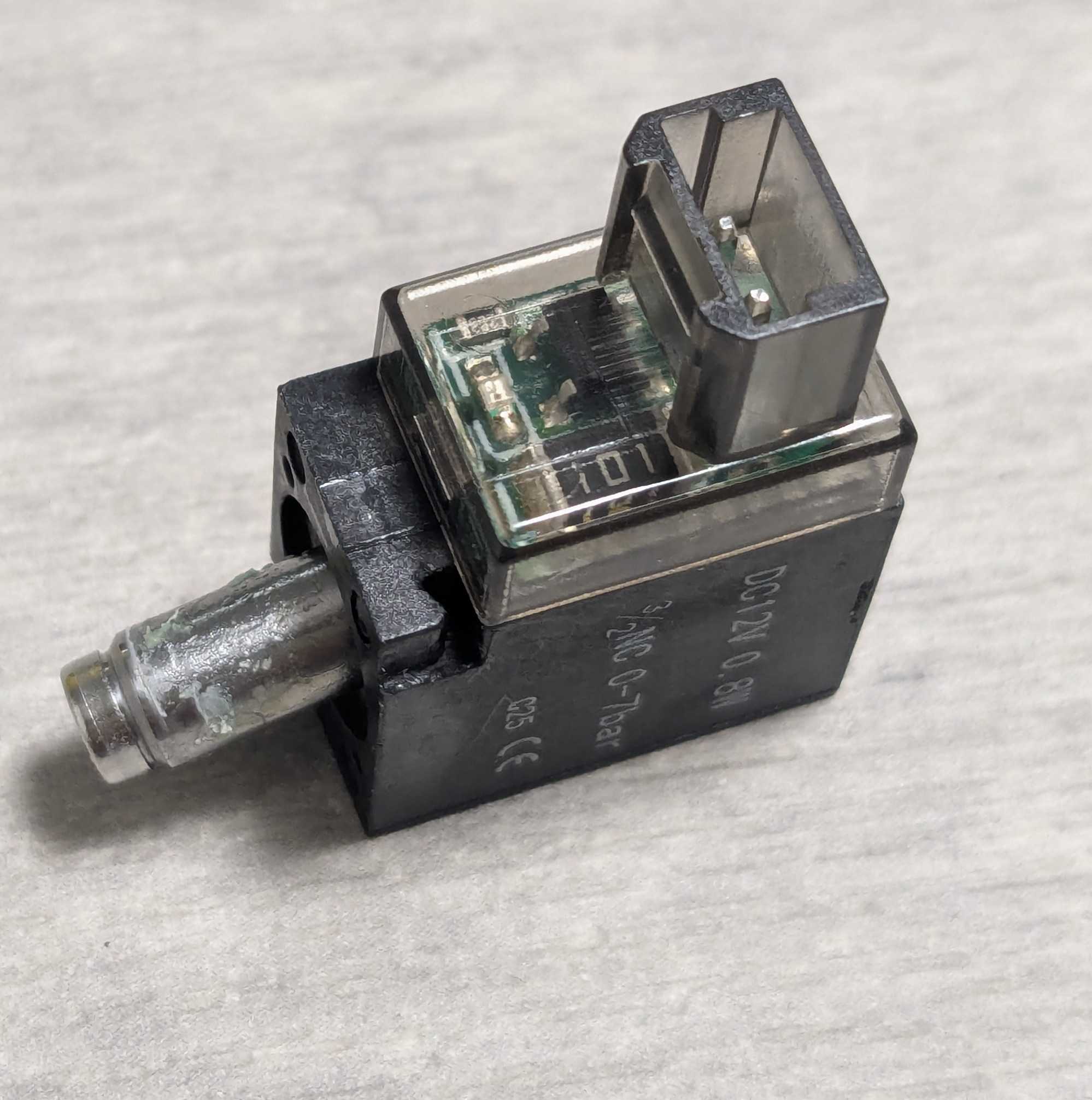
帯魚 CO2電磁弁は3か月に1度メンテナンス
6月頭に交換した電磁弁だけど、昨日から動作がおかしい。ということで交換して、分解してみた。すると写真のとおり、なんかが付着して動かなくなっていた。3か月に一度掃除しましょう、という結論になりました、ちゃんちゃん。
2025.09.12
コメント(0)
-

熱帯魚 新しい仲間
最近、ミッキーマウスプラティさん、相次いで☆彡になってしまったので探しに行ったのだけれど、店頭に赤い人(魚)がいなかったので、グローライトテトラさん5匹、ネオンテトラさん5匹に加わってもらった。写真に一杯写っているので、整理してみた。ラスボラ・エスベイ 2020/09/14 3匹⇒2匹 長生き!ネオンテトラ 2022/01/16 ?匹⇒3匹ラミーノーズテトラ 2022/05/15 3匹⇒2匹アフリカンランプアイ 2022/09/24 6匹⇒たくさん生まれて⇒4匹ミッキーマウスプラティ 2024/01/21 3匹⇒1匹ヤマトヌマエビ ? ?匹⇒3匹ちなみに写真後方のコンセント4口には、ポンプ、ヒーター、タイマー(照明)、ファンが刺さっている
2025.08.11
コメント(0)
-
SmartBand Tips
Xiaomi SmartBand 10 を買ったのだけれど、結構、使い方がわからないのでメモ書き。ネットの情報は、古かったり、アプリのバージョンが違ったりで、当てはまらないこともある。役に立った動画https://www.youtube.com/watch?v=dH20T5xC7dMアプリ名:Mi Fitnessバージョン:3.43.01(日本語)デバイス:Xiaomi SmartBand 10カロリー、歩数などの目標設定の変更アプリで、デバイス-フィットネスと健康-統計 と進めば設定できる。Xiaomi の電池の時間が長いのは、初期値で機能を絞っているからだと思う。Huaway と同程度の機能にしようと思ったら、電池を消費する設定をONにする必要がある。睡眠とか、血中酸素とか、、、2025/8/31Pixel6a のカメラをコントロールする方法カメラの設定-その他の設定ーボタンのショートカットで、音量操作ボタンを選ぶ音量操作ボタンがシャッターボタンになる設定で、これをしておけばSmartBandからシャッターを操作することができる。
2025.08.08
コメント(0)
-
熱帯魚 CO2再設定
薬剤が切れたので再設定。クエン酸120gで1か月少しという感じ。7月21日に仕込みなおしたので次は9月頭かな。電磁弁は、中身を空けずにそのまま様子見。次回入れ替えて分解してみようと思う。生体の方で、カージナルテトラさん☆、ミッキーさん弱ってる。みんな長生きしてお歳だしなぁ。という覚書でした。
2025.07.22
コメント(0)
-
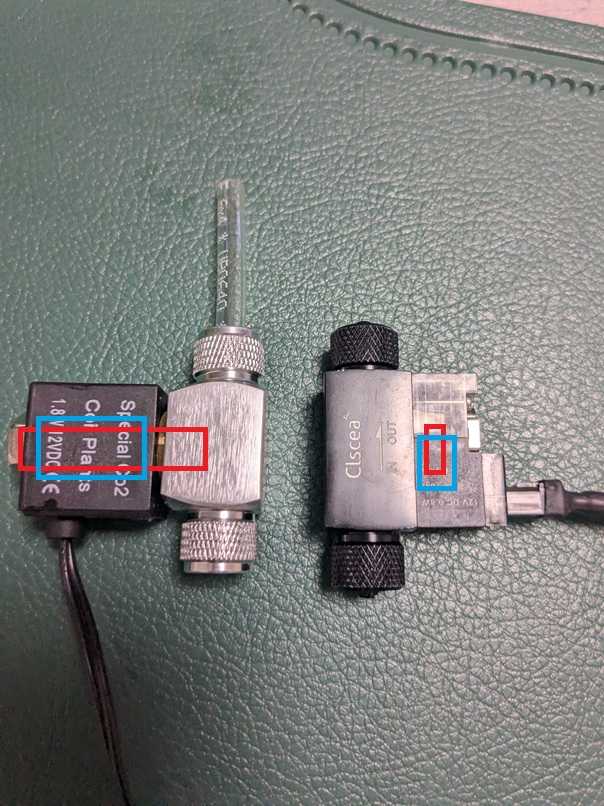
熱帯魚 CO2電磁弁はメンテナンスが必要
タイトルのとおり、電磁弁にはメンテナンスが必要、というお話し。元々の電磁弁(OEMではなくオリジナル(多分))を注文して、説明書を読んでみたら、しっかり書かれていた。「発酵式、フィルター無しの化学反応式でのご使用はお控えください。」要するに、いろんなものが固着するからしっかり掃除しろよ! ということらしい。なので、壊れたのではなく、壊したということ。確かに、分解掃除したときに「これで直前までよく動作していたな」と思うくらいひどかった。なので、今後は分解掃除してみて、頻度を確かめよう、と思った。ちなみに、凄く発熱する電磁弁と、この電磁弁では構造が違う、電磁弁部分の大きさが違う。ネットで調べた限りの情報を絵柄にすると、この図のような感じ。赤い枠が可動部分、青い枠がコイル。どちらも分解掃除しやすい、特に左の熱くなる方はネジを緩めれば容易に分解できるし、扱いやすいサイズ感。可動部分が大きいので熱を持つのだと思う。アルミの部分がしっかり放熱しているはず。思うところがあって、交換部品も追加で注文してみた。電源の取り出し方向が違うし、回路も明らかに違う。なので、今現在稼働可能な電磁弁が3つある。このあと、熱い奴は分解掃除のために新しく買ったやつと交換の予定。その後1か月、2か月、3か月と分解掃除の間隔を延ばしていって、様子を見る。勉強代が高くついた、という感じ。HaruDesign CO2用電磁弁 SV120-BLK
2025.06.08
コメント(0)
-
熱帯魚 電磁弁 一瞬不調
一昨日、帰宅してみたら泡が出ていない。スピコンを緩めたけれど、変化しなかったので壊れたと判断した。とにかく熱を持つので、これは耐久性に難があると思っていたので、さっさともともと使っていた製品を注文した。合わせて、ダメ元で壊れたと判断した電磁弁を分解してみると、ものの見事に固着している。掃除してみたら可動部が動くところまでは回復した。これは早まったかも。昨日、帰宅してみたら泡が出ている、ちゃんと動いたみたい。あーぁ、本当に早まったかも。ということで、分解の仕方はわかったので、新しい電磁弁が届いたら分解して正常な状態を確認して、しばらく保管。また壊れたと思ったら交換。さらに、分解を試みてみようと思うが、なんとなくロックタイトが塗られていてネジが回らないだろう、という予感。1年放置は無理みたいなので、半年ごとに掃除かなぁ。自動給餌器の電池交換のタイミングで掃除していよう、と思った。
2025.06.06
コメント(0)
-
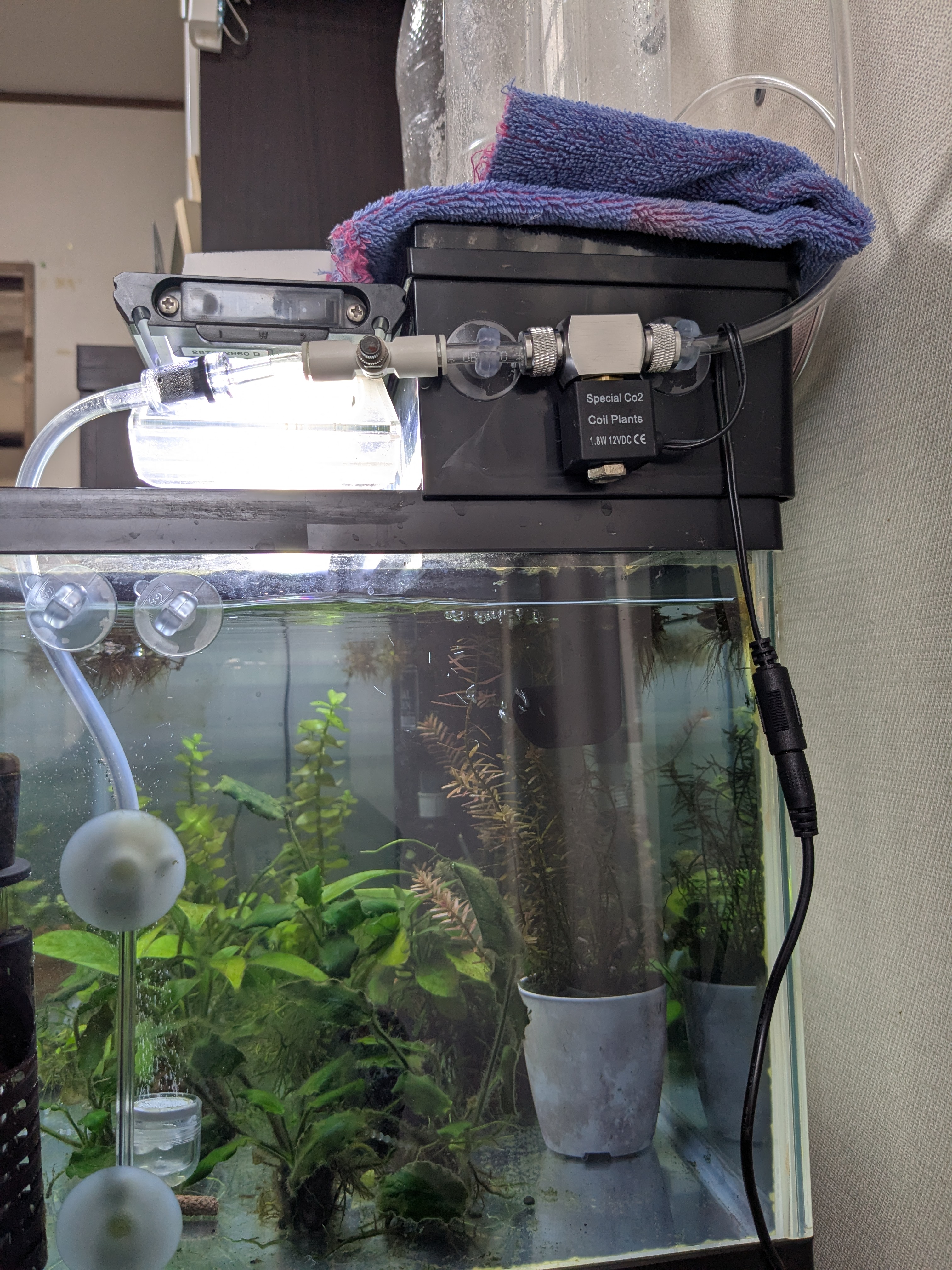
熱帯魚 CO2の覚え書
年末から苦労していた化学式CO2が、やっと復旧したので、その顛末の覚え書き。年末から調子が悪かったのだけれど、薬液の減りが早くて、すぐに圧力が低下して、水槽の水が逆流してくる、というものだった。逆流するので逆止弁や配管の漏れを疑ったのだけれど、電磁弁が壊れて電源OFFになって閉じなくなったのが原因みたい。普段の3倍の量のCO2が生成されて、クエン酸足りなくなって圧力低下して水を吸い上げた? これに配管が水槽よりも下に伸びていたので水の吸い上げを助長したのではないかと想像。現在は、電磁弁を交換したので以前のように安定して稼働している。ということで、自分なりの注意事項1)毎日確認する。確認するのは圧力。下がっていたら重曹のボトルを振って化学反応しきれていない分を促す。次に、クエン酸の先端の位置を確認する。丸いボールがぎりぎり水面に顔を出すくらいが良いと思う。それより深いとクエン酸が重曹側に流れ過ぎると思う。ボトルを振る、クエン酸の吸い込み口を調整する。これくらい毎日やろう。2)セラミックプレートは苔が付いたら交換細かい泡が出にくくなったら交換。こすると目詰まりするみたいなので、掃除の仕方を勉強しよう。3)ボトルは上部式フィルターの上に置くことにした。下の写真参照。4)何かトラブったらよく考える。今回、もっと考えていたら早く結論に達したかもしれないCO2のおかげで水草は元気、維持費は2か月で330円。初期費用は1万円弱かなぁ、ボンベ買うことを考えたら維持費激安。
2025.05.12
コメント(0)
-
ドローン EdgeTX バージョンアップ
2.10.5 から 2.11.0 にバージョンアップした。新しいコードネームは「JollyMon」となっているけれど検索しても見つからない。方針変更かなあ、elrsv4というのも気になる。T123FのPCで、Buddyを使ってアップデート。SDCardの中身も変更できて洗練されている感じ。elrs.lua がいなくなっていたので、再インストールして出力を見直してみる。T141FのPCで試してみたけれど、Buddyで上手く認識しない。Firmwareをダウンロードして送信機単独でUpdateした。T12と同じ様に3FのPCでやり直してみよう。5/10 追記送信機の接続の仕方がサイトの記述と違う。正しくはこの日記に書かれている通り、DFUモードのスイッチを押しながらUSBケーブルを接続するで無事認識。
2025.05.09
コメント(0)
-
パソコン関連 ラズパイで定点観測カメラ
ラズパイの外向けサーバの調子が良いので、他に何かできないかを考えてみた。Webカメラがすぐそばにあったので、こいつをつなげてみてはと試したら簡単に画像が取得できた。でもサーバの置き場所の周りには何も観測するものが無いのであきらめたけれど、もう一台ラズパイがあることとこのラズパイはWifiで接続できることを思いだした。じゃぁ、有線LANの制約が無くなるので比較的自由に置き場所を選べるということから、再度チャレンジ。1.ipアドレスの固定ルータの設定で、MACアドレスからipv4のアドレスを固定する。200番にした。2.カメラの接続これは簡単。参考にしたのはここ。https://qiita.com/suo-takefumi/items/355479f46bf3957ffd8f静止画で十分なので、アプリもfswebcamでOK。「-r 640x480」で解像度指定。3.ファイルの転送今回設置のラズパイから外向きサーバにscpで送る。パスワードの入力を回避するためにここの情報を利用。https://www.eyes-software.co.jp/2020/04/14/ssh-scp%E3%81%A7%E3%83%91%E3%82%B9%E3%83%AF%E3%83%BC%E3%83%89%E7%84%A1%E3%81%97%E3%81%A7%E6%8E%A5%E7%B6%9A%E3%81%99%E3%82%8B%E6%96%B9%E6%B3%95/4.cronで画像取得、転送5.外向けサーバで表示現在作業中。9,12,15,18に画像取得して転送。最新のファイルを表示という流れで。多分、問題なくできるでしょう。
2025.04.30
コメント(0)
-
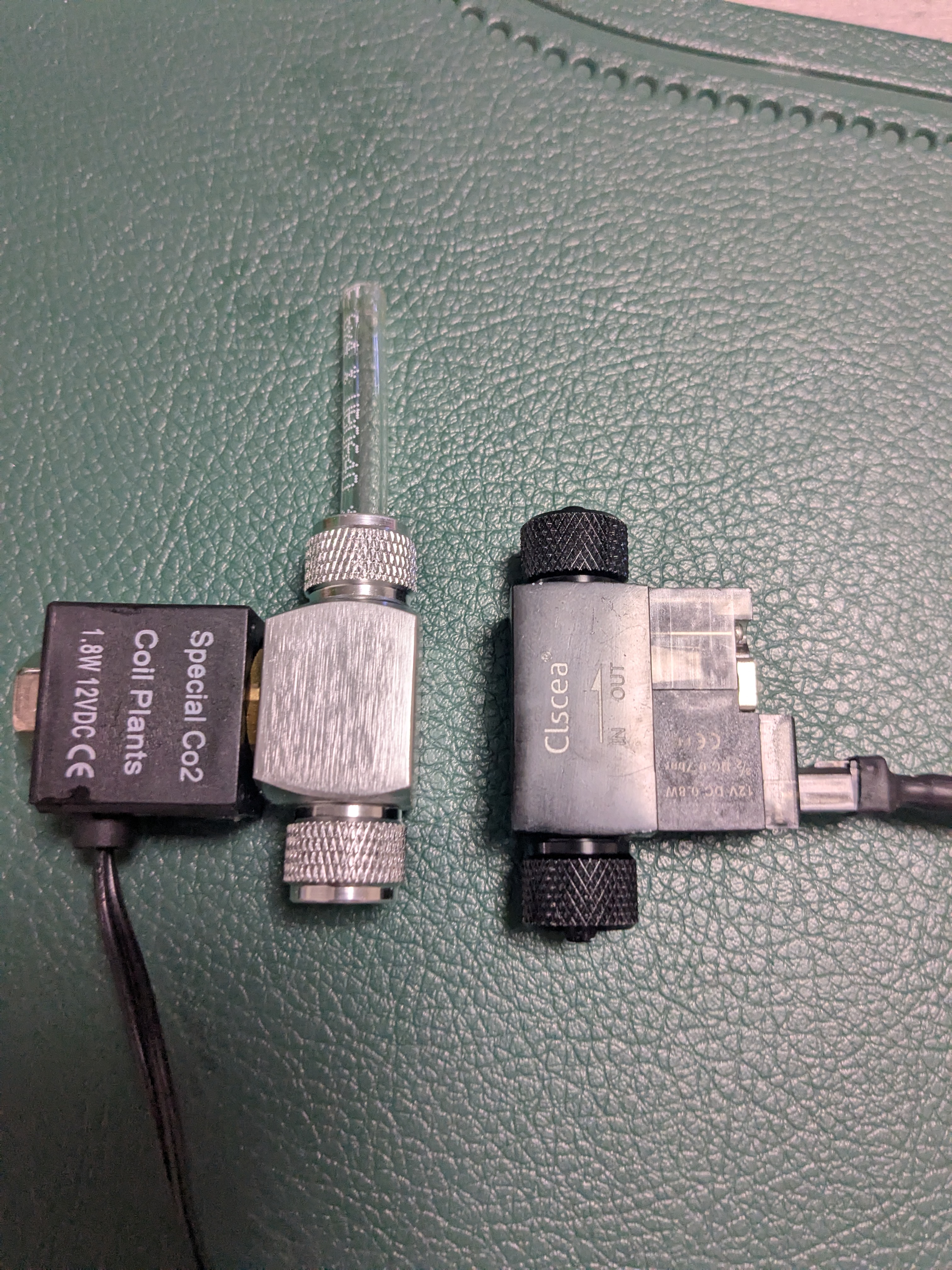
熱帯魚 電磁弁到着、3か月の苦労はこれで決着か?!?
電磁弁が郡山から届きました。なんか住所の記載に不手際があったらしく、2往復して到着。左が新しい方、値段は半分以下。右が壊れた古い方、結構有名な評判の良さそうな品。取り付けた様子。今回は水圧で逆流しないように、水面より高い位置に設定してみた。でもCO2が水に溶けて圧力が下がった分は吸いあがってくるんだろうなぁ、と思ったり。新しい電磁弁はしっかりした作りに見えて、電圧高くて、動作中は熱を持つ。触り続けられない訳ではないが、「熱ッつ!」と思うくらいの熱を持つ。ということで、無事に稼働します様に(南無)
2025.04.27
コメント(0)
-

熱帯魚 CO2の不具合は電磁弁だったようだ
年末からゴソゴソ触っていたけれど、原因は電磁弁の故障みたい。症状は、やたら薬剤の減りが早い、圧力が低下して出ない、というものだった。配管や逆流弁を疑ったけれど、電磁弁の電源を外してチューブを抜いても、ブワーッとCO2が出てきたので、これが原因と気が付いた。一晩中CO2出っ放しだし、そのうち出尽くして圧力低下というものだと思う。2年間持ったけれど寿命なのか? 今回は格安の物を頼んでみた。これで直ります様に、、、南無CO2用電磁弁 外付けタイプ 小型 発熱が少ない 高性能 水草水槽 メール便可
2025.04.18
コメント(0)
-
ドローン ジンバル遊び(その2)
FollowModeが動くようになったので、実用的に使うにはJoystickでのコントロールが必要ということで、試してみた。接続は、ネットにある情報の通り。ボタンのスイッチは単線しか出ていなかったけれど、GRD共通で動作するみたい。下がGRD、上がSWで動いた。設定で役に立つ動画はこれ。https://www.youtube.com/watch?v=y_-kQxFqcpkまず接続したら、Caribrationして、中立と左右の動きを調整する。中立位置のOFFsetが出来ていないと、ジワーッと左右に動いてしまう。次に、Modeはspeed、SpeedとLPFの値で動きを調整する。最初、LPFに50位の値が入っていたものだから、動き出しが極端に遅かった。小さい数字にすることで、動画のような動きになった。フレームに付けたら、残るはSWの設定とFollowModeの数値の絞り込み。その後は動画の取得かな。
2025.04.18
コメント(0)
-
ドローン ジンバル遊びが見通せてきた
引退したドローンの部品で遊んでいるけれど、やっとモノになりそうな気がしてきた。問題はFollowMode(YAW軸)が確実に上手く機能しない、というものだったけれど、マニュアルや参考になるサイトのおかげで、機能するようになった。役に立ったサイトはここ。https://zenn.dev/aeronext_dev/articles/df1b5fafb8dd54マニュアルの日本語訳は以下のとおり。=====9. フォローモード設定フォローモードは、カメラを外枠の動きに追従させる特別な制御モードです。同時に、フレームの小さな揺れを抑えます。この動作にはいくつかのモードがあります。•無効 – カメラは地面に固定され、RCまたはジョイスティックでのみ回転できます。•フライトコントローラー追従 – カメラは、外部フライトコントローラー(FC)からのミックス信号とRCから制御されます。ほとんどすべてのFCには、ジンバルを駆動するためのサーボ出力があります。機体の角度に関する情報は、サーボが使用するPWM形式でこれらの出力に送られます。SimpleBGCはこの情報を取得し、機体の傾きに追従するようにカメラを制御します。外部フライトコントローラーを接続してキャリブレーションする必要があります(EXT.FC GAIN設定を参照)。キャリブレーション後、カメラがフレームの傾きに追従するロールとピッチのパーセンテージ値を設定できます。•フォローピッチ、ロール - このモードはハンドヘルドシステム専用です。FC接続は不要です。このモードでは、ピッチとロールによる外枠の位置はモーターの磁場から推定されます。つまり、モーターがステップをスキップした場合、位置の推定が誤っているため、オペレーターはカメラを手動で修正し、正しい位置に戻す必要があります。警告:FPV飛行では、カメラが最初の方向を見失った場合、自動的に元の位置に戻すことができないため、このモードは慎重に使用してください。ただし、エンコーダーを使用している場合は、これは問題になりません。◦フォローロール開始、度 - ロール軸がフォローモードに入るカメラのピッチアップまたはピッチダウンの角度(度)を設定します。この角度を下回ると、ロールはロックモードになります。◦フォローロールミックス、度- カメラのピッチング範囲(度)を設定します。この範囲では、ロール軸が「ロック」モードから「フォロー」モードへと徐々に切り替わります(画像参照)。ヒント:ロール軸のフォローを完全に無効にするには、これらの値を(90, 0)に設定します。ロール軸のフォローを永続的に有効にするには(カメラのピッチングに関係なく)、値を(0, 0)に設定します。•ヨー追従 – 上記と同じですが、ヨー軸のみ有効にできます。例えば、「無効」オプションを選択すると、ロール軸とピッチ軸でカメラをロックできますが、「ヨー追従」オプションを有効にすると、ヨー軸でカメラを制御できます。フォローモードを調整するための追加設定があります。•デッドバンド:アウターフレームの回転がカメラに影響を与えない範囲を設定できます。ジンバルを手動で操作する際の小さな揺れを抑えるのに役立ちます。値は標準の60度のフォロー範囲を基準に角度で表し、範囲が変化すると比例して伸縮します。•露出カーブ:露出カーブのパラメータが0より大きい場合、アウターフレームをニュートラルから小または中程度の偏角にすると、非常に細かい制御しかできなくなります。しかし、偏角が大きくなると(最大±45度)、制御の強度は飛躍的に増大します。この機能により、細かくスムーズな制御から非常に速い動きまで、カメラ操作の自由度が大幅に向上します。•SPEED - カメラの回転速度を調整します。モーターが対応できないほど大きな値を設定しないでください(モーターがカメラを動かすのに十分なトルクを生成できない場合、ステップスキップが発生し、同期が失われます)。この場合、加速リミッターを使用すると、ステップスキップを防ぎながら高速化を実現できます。重要事項:SPEEDの値が高い場合(50~100以上)、LPFパラメータを2~3以上、「Expo Curve」パラメータを50以上、「Dead-band」パラメータを3~5度以上に設定することを強くお勧めします。それ以外の場合、追従制御中に振動やジャークが発生したり、ターゲットのオーバーシュートが発生したりするなど、システムの誤動作が発生する可能性があります。•LPF – 「Follow」モード時の速度制御に適用されるローパスフィルターを調整します。この値を高く設定すると、ハンドルの素早い動きが滑らかになります。ただし、カメラの不要な振動を防ぐには、慎重な操作と多少の練習が必要です。2未満に設定しないことを推奨します。•RANGE (バージョン 2.62b6 以降):このパラメーターは、最大強度の制御信号を生成する外側のフレームの偏向角度(度)を定義します。この範囲外では、制御信号はクリップされます。デフォルト値は60度です。•デッドバンド内のフォローレート – カメラを常にデッドバンドの中央に保つための非常にソフトな制御です。この機能を無効にするには、0に設定します。•ホームポジションオフセット◦エンコーダー使用時:ホームポジションを調整できます。ホームポジションは通常、モーターのゼロ角度に設定されますが、このパラメータでシフトできます。◦エンコーダーなし:カメラが「フォロー」モードでモーターの極に「スナップ」されている場合、カメラの初期位置を微調整できます。ピッチモーターとロールモーターには、オフセットを自動調整するオプションがあります。これを行うには、システムの電源を入れ、フレームを水平に保ち、ジョイスティックまたはRCでカメラをフレームに対して目的の位置に移動させ、AUTOボタンを押します。•可能な場合はフレームIMUを使用する – 2台目のIMUが接続されている場合は、システムは電界推定に基づく方法の代わりに、それを使用してモーターの角度を検出できます。IMUベースの方法は、電界の場合のように同期が失われないため、より信頼性が高いです。•軸がフォローしていない場合にオフセット補正を適用する – いずれかの軸がフォローしていない場合、対応するモーターは、その軸と他の軸に対して制御信号を生成しません。ただし、軸がフォロー モードに入ると (たとえば、ピッチ角度に応じて ROLL が「ロック」モードから「フォロー」モードに切り替わる場合があります)、またはフレームが回転してモーターが別の軸を安定させ始めると、モーターは「通常」の位置にない場合でもゼロの制御信号を生成する必要があります。このオプションを有効にすることをお勧めします。•メニューボタン長押しでフォローモードを無効化 (バージョン 2.62 以降) - この機能を使用すると、メニューボタンを長押しすることで、プロファイル切り替えを必要とせずにフォローモードを一時的に無効にできます。ボタンを3秒以上押し続ける場合は、「長押し」メニューコマンドに割り当てられたアクションを無効にすることをお勧めします。•外部 FC ゲイン - フライトコントローラーからのジンバルデータに一致させるためのゲイン値 (オプション)。安定性を向上させ、いくつかの追加機能を活用するには、フレームの傾斜角度に関する情報が必要です。エンコーダーレスのシングル IMU 構成では、このような情報は取得できません。しかし、ほとんどのフライトコントローラーにはジンバル接続用のサーボ出力があり、これを使用して情報を取得できます。これらの出力は、EXT_ROLL および EXT_PITCH 入力を介して SimpleBGC コントローラーに接続し、以下の手順を実行してください。◦RC タブで、EXT_ROLL および EXT_PITCH 入力がどの機能にも割り当てられていないことを確認します。◦「モニタリング」タブで、EXT_FC_ROLL、EXT_FC_PITCH 信号の可用性を確認し、軸に正しく割り当てられていることを確認します。(フレームのロール角を傾けると、EXT_FC_ROLL が約 900 ~ 2100 の範囲で変化します。ピッチも同様です)。◦ジンバルをオンにします。適切に調整され、このステップで安定化が機能するはずです。◦外部FCゲイングループのAUTOボタンを押し、機体のフレームをすべての軸で10~30秒間、様々な方向に滑らかに傾けます。コントローラーは機体からの信号とIMUセンサーからの信号を照合し、それらの関係を検出します。フォローモードでの操作システム起動時にフォローモードでフレームを水平に保ち、カメラを手動で水平位置に調整し、向きを調整します。カメラは磁極間を簡単に「ジャンプ」します。カメラを手動で希望の水平位置に回転させると、最も近い磁極に吸着します。フレームをゆっくりと回転させ、傾けます。±45°以内の回転で、カメラの速度を0~100%の範囲で制御します。カメラは、フレームの角度とカメラの角度が等しくなくなるまで、または指定された制限に達するまで、SPEED設定に従って回転します。カメラが予期しない動きをする場合は、モーターの回転方向が間違っている可能性があります。「ハードウェア」タブでINVERTフラグを変更する必要があります。スムーズな動きを実現するには、LPFパラメータとExpoカーブの値を増やし、SPEEDと加速度の制限値を下げてください。よりダイナミックな制御を行うには、これらの設定を逆方向に変更してください。外部からの干渉により安定化が失敗した場合、カメラはフレームとの同期を完全に失う可能性があります。この場合、手動で適切な位置に戻す必要があります。異なるプロファイルをアクティブにすることで、モードをオンザフライで切り替えることができます。この間、カメラはモード間で同じ位置を維持します。=====ここまで
2025.04.10
コメント(0)
-
熱帯魚 CO2 復活!
まぁ、無知すぎた。https://www.youtube.com/watch?v=I3TDWMSxuZA調子が悪いなぁ、ちゃんと出ない、安定しない、すぐに無くなる、ということでペットボトルのパッキンからの空気漏れを疑ったが、違った。ちゃんと組み立てても、CO2が出ないので、出口に近い方から調整弁の接続を確かめたら、「スポッ」と抜けてしまった。ここかぁ~!ということで、改めて接続方法を確認。押し込めばいいだけなんだ。現在、流量調整ダイヤルの微調整中。これでうまくいくはず、、、果たして。
2025.04.05
コメント(0)
-
パソコン関連 ラズパイで外向けサーバ(その7)
sambaを設定した。参考にしたサイトを探したけれど見つからない(ドジ)普通にインストールして、パスワード設定して、samba.confいじった、という記憶。⇒ 見つけたhttps://lifelog.tokoton0ch.com/post-1259/#toc_id_2_2で、スマホにowlfilesを入れて確認、無事にドライブ全体とuserのhomeが見れた。会社から、スマホで(要するにキャリア回線で)アクセスしようとしたが、PORT開け忘れ。帰宅してからルーターの設定を修正する。SSH(22)とsamba(445)をサーバのアドレスに対して開けておく。翌日、無事開通を確認。さらにPCでも試してみる。参考にしたサイトはここ。https://qiita.com/charon/items/1ed11ed9dd6c7881213fで、GUIのインストールが完了しなかったので、エクスプローラーで直接入力\\sshfs\REMUSER@HOST[\PATH]パスワードを聞かれるのでsambaの方を入れてあげればOK。無事につながって、ファイルのコピーを双方向で確認して終わり。Userのhomeしか見えない。1TBの保存場所が増えた。さて、GoogleDriveさんとどちらが使いやすいだろう?
2025.03.04
コメント(0)
-
パソコン関連 ラズパイで外向けサーバ(その6)
ラズパイでサーバを構築するきっかけになった、NASによるサーバの故障だけれど、再構築を試みたけれどNASのハードウェア(Buffalo LS-VL)が壊れているみたいで起動しなかった。HDDは活きているみたいなので入れ物を買ってUSB接続の外付けHDDに仕立てた。で、今元気に稼働している外向けサーバに取り付けて、外からも接続できるようなファイルサーバを作りたい、というのが新しい遊び。勤務先からはVPNで接続できないので、別の方法を用意しないといけない。とりあえず、HDDを自動でマウントするところまで進めた接続は、puttyではなくターミナルから、>ssh ID@hostnameで接続した、できた。これだとrebootしても接続が切れるだけで、putty立ち上げなくても再度コマンドたたけばつながるので便利。># HDDが認識されているかを確認する。(デバイス名を確認)>sudo fdisk -l># 新しいストレージをマウントする場合は以下のコマンドでフォーマットする>sudo mkfs -t ext4 /dev/sdb1># HDDをマウントするディレクトリを作成>sudo mkdir /mnt/usb-hdd>sudo chmod 777 /mnt/usb-hdd># HDDをマウント>sudo mount -t ext4 /dev/sdb1 /mnt/usb-hdd># 自動USBマウントの設定>sudo vi /etc/fstab>/dev/sdb1 /mnt/usb-hdd ext4 defaults 0 0参考にしたのはここ。https://qiita.com/shimanuki-yu/items/cddf7e1d490ad66743f3https://ameblo.jp/anima-ameblo/entry-12653137749.htmlhttps://lifelog.tokoton0ch.com/post-1259/#toc_id_2_2このあと、sambaをいれて、トンネルで接続する方法を採用するつもり。
2025.03.01
コメント(0)
-
ドローン 年末年始の整備、修理の記録(その3)
もう、年末年始ではないけれど、備忘録。初号機は、VTXのPortの設定が言うことを効かない。UARTをONにすると設定が全部消えてしまう。OFFのままでもSmartAudioは動作するので問題ないけれど、気持ちが悪い。そこで、壊れたと思っていたFCを復活させる案が浮上して、取り付けてみると予想通りちゃんと動く。ELRSで統一できるし、新しめのFCだからちゃんと行くだろう。四号機は、FCのUpdateのためにDriverを入れた。参考にしたのはここ。https://helimonster.jp/?pid=179408641&srsltid=AfmBOoq0q-DZUls-sMYZft_nHtiG1gpeJ0Rx7EAlHSfq6IDqyZl21T-0ここの説明にあるドライバを2つ導入してみると今までCOM3だったのがCOM7で接続されてちゃんとDFUモードになってUpdateできた。ところが、送信機の言うことを効いてくれない。色々と調べてみたけれどわからないので、何度か焼き直したら動くようになった、変なの。これでOKのはず。今のところESC-Configratorがつながらない。そのうち何とかなる?StandAloneを使う?怪しいなぁ。伍号機はモーターが届いて、無事に終了。やれやれ。
2025.02.10
コメント(0)
-

年末年始の整備、修理の記録(その2)
続き。。。四号機をPusherから、元の形態に直すことにした。すると、四号機、伍号機でFrameとmotorが共通になるのでメンテナンスがしやすい、というもの。で、先に左下の初号機のキャノピーを取付けて組み上げ、完成。問題なし。次に、右上の四号機をcamera+VTXを残して組み立てたところ、2番モーターの調子が悪い、アーム時の回転が不安定、そのうち回らなくなる。あれ、FCの故障だと思っていたけれど、モーターなの?と取り外して調べてみると、、、モーターの根元で断線。即、発注。伍号機からモーター拝借して、四号機完成。問題なし。左上、伍号機はモーター待ち。それ以外は完成。ということで、モーターが届いたら、OSDの設定を統一して、少し試験飛行をして春を待つ。
2025.01.29
コメント(0)
-
ドローン 年末年始の整備、修理の記録(その1)
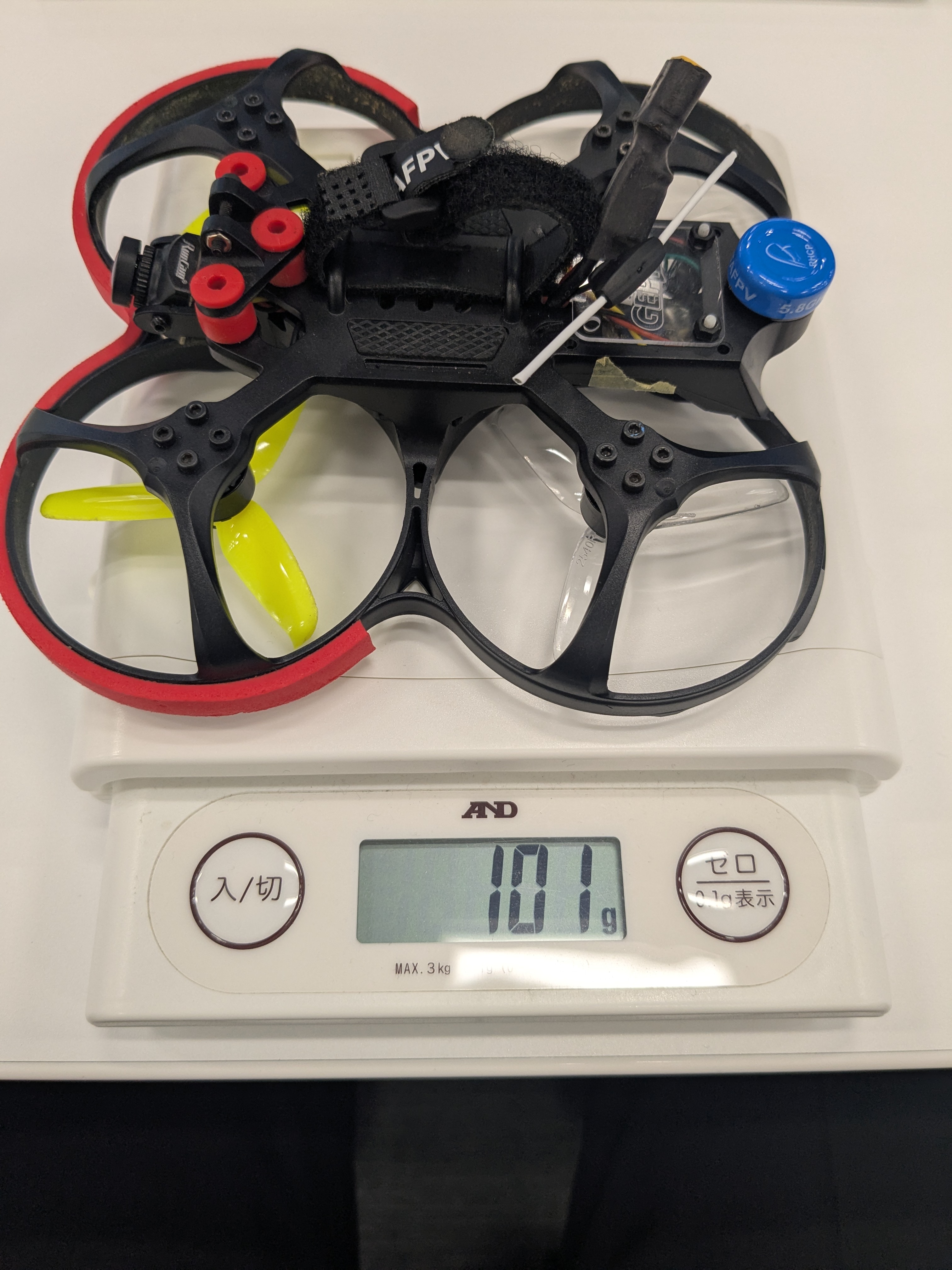
年末のEdgeTXは、modelの選択を間違っていた、という初歩的なミスだった。T12Pro、T14とも2.10.5にUpdate。弐号機のLEDを他で利用したかったので、別のものと入替。純正品なので基板が薄い。参号機がarmしないので調べてみたら、受信機のはんだが千切れていたので修理することに。その時、強引に熱収縮チューブを剥がそうとしたら、セラミックアンテナを引きちぎるという痛恨のミス。修理不能なので、BetaFPV 2.4G nano RX を注文。結線してFirmwareのUpdateを試みるもエラーが出る。ひょっとしてと思って調べたら、コネクタを横着に押し込んだものだから端子が1本折れ曲がっていた。奇跡的に修理できて、Updateできて再試行するも受信機を認識してくれない。原因を切り分けるために、AC900というSFHSSの受信機があったのを思い出して、FC、送信機の設定を変更して試してみるも、この受信機電源も入らない故障品みたい(さっさと捨てろよ)。この作業中に、FCとESCを接続する線がはんだ部分で千切れるというアクシデントも発生して修理。その後で、ELRSに戻してみたら、、、つながるではないか!?!。 何らかのきっかけで正常に動くようになったみたい。ということで、会社に持ってきて昼休みの練習用で、しばらくは様子見。下の写真の通り、重量は100gオーバー。カメラマウントを外して2S仕様にしても80g以下にするのは難しいだろうなぁ。初号機、四号機、伍号機の修理、整備に続く、、、
2025.01.21
コメント(0)
-

熱帯魚 CO2 再設定
年明けから、CO2の具合が悪かった。具体には、薬剤を入れ直したのだけれど、これまでの様にCO2量が安定しない。気が付くとブクブク出ていなくて、水が逆流してくる感じ。で、これまで逆流らしきものを感じたことも無かったので、逆流防止弁がくたびれたのかと想像して、小さくて格好の良いのを購入した。合わせて各種のアイテムの設定箇所が微妙に違うみたいなので、下の写真の様に整理し直した。ディフューザーがバブルカウンターを兼ねているので、直後の水中に逆流防止弁、外側に折り返してスピコン、電磁弁の順。以前は、重曹のタンクの直後に順番に並べていた。ぼわぁっと大量にCO2を放出していた時間が長かったせいか、水草から水泡が昇っていく姿を久しぶりに見た気がする。取り敢えず、安定している(=夜間は電磁弁で止めているが、朝復帰してもちゃんとCO2量をコントロールできている))。1階の生体水槽にも追加する? 初期費用がそれなりに掛かるしなぁ、、、考え中。HaruDesign CO2チェックバルブ CVP-4
2025.01.20
コメント(0)
-
パソコン関連 ラズパイで外向けサーバ(その5)
1月1日を最後に外向きサーバの死活メールが届いていないことに、今日気が付いた。サーバが生きていることは、リモート接続して確認できているので、おそらくGMailの認証に失敗していると思われ。案の定、mail-alive.py を実行したら、エラーを吐いた。アプリパスワードを設定して、それを上記のファイル中に記述し直して、無事に復旧。2段階認証をONにしているから定期的にクリアされる?https://myaccount.google.com/apppasswordsということで、良かった良かった。
2025.01.08
コメント(0)
-
ドローン Jumper T12 EdgeTXのUpdateに失敗?
年末年始の整理のついでに、2台の送信機のEdgeTXをUpdateした、2.10.5。T14はすんなりとBuddyを使ってできたけれど、T12は何か変。SpecialFunctionの音声トラックの再生が繰り返されるし、Armしないし。これは初心に戻って、FirmwareをSDCardに入れてInstallするのが良さそう。さらにSDCardの設定ファイルもバージョンに合ったものに直そう。あとはExternalのELRSかなぁ。T14が動作しているので、1からやり直しても大丈夫だから、落ち着いてやろう。
2025.01.07
コメント(0)
-
ドローン 伍号機組み立て中(その2)
>1.LEDが光らないFCボード上のLED以外に、番号を与えて設定すればよい、というものだった。BetaFlighrのLEDタブの画面を見ていて気が付いた。機器、配線に問題はなかったみたい。>2.ESCのバージョンはどうすれば良い?これは大失敗して右往左往した。失敗の内容は、ESC-ConfigratorでLipoBatteryを接続せずに更新作業を行った、というものだと思う。見かけ上は、更新できたように見えたけれど、実際はデータを壊していたみたいでバージョン名が文字化けして「ýýýý」みたいな感じだった。強制的に書き込めば良いだろうし、そういうこともできるみたいだけれど、その方法が実施できない。BluejayのStandaloneのアプリを試したり、BlHeliのアプリを試したりしているうちに、復活した。C_x_70_48_v0.19.2がインストールされたはず、ちょっと怖くて確認できない。この状態で、Betaflightから双方向DSHOTを有効にすると、アームしてもローター回らない。想像だけど、Minimum Startup Power の値が低いからではないかと、でも怖くて試せない。怖がってばかりはいられないから、どこかで試すんだろうなぁ。ドキドキ。追記)ESC-Confgiratorを使って、c_x_70_48_V0.19.2.HEXをインストールできたことを確認し、初期値で動作することができた。4番の回転が遅く不安定なので、アイドリングを5.5から5.8にあげたけれど。途中経緯はもうわからないけれど、結果オーライで進めよう、と思う。
2024.12.31
コメント(0)
-

ドローン 伍号機組み立て中
壊れたと思っていたFCとモーターがどちらもが生きていたので、せっかく買った部品が余っている状態。せっかく買ったのだからと組み立ててみた。カメラとVTXは、Digital導入で押し出されてきたセットを新しいキャノピーに仕込んでみた。で、配線して組み立てたのが下の写真。この後、モーターの回転を手直しして(多分CCWが3つ届いた。赤い着色のものが3つ)飛ぶところまでは確認した。現状の不具合、疑問点は?1.LEDが光らないFCボード上のLEDは設定どおりに光っているが、RGB LED Extendに接続したLEDは光らない。何か設定があるのだろうか? とりあえず、BUZZARとLEDを別々の製品にしてみよう。2.ESCのバージョンはどうすれば良い?もともとCX-70というのがインストールされているけれど、これをCX-30にしろとサイトには書かれている。ところがこれは違うよ、と言われて書き換えられない。なので70のままなんだけどこれでよいのか?もわからない。ついでに、送信機のEdgeTXを最新のバージョンにUpdateした。2.10.5 。そうしたら起動時にRTC Battery Low というwarningが表示されるようになった。調べてみると送信機内の時計のバックアップ電池らしい。単にUpdateのタイミングと合致しただけで、バグではなさそう。ということでCR1220を100均で購入して交換した。T12Proも同じ電池なので年明けに交換しよう、そうしよう。
2024.12.28
コメント(0)
-
ローン Walksnail Avatar VRX と VTX 1SLite を買った(その2)
つながることがわかったので、機体として組み上げてみる。メンテナンスを考えて、FCのコネクタのアクセスが容易になるように、基板とフレームの配置を考える。まぁ、こんなものかというところで一応落ち着く。次は、Betaflightの設定の変更。プリセットでavatarを検索して導入する。保存して再起動しても、OSDのタブでHDが選べない、薄い文字のまま。・・・あっ! ということで、Betaflightをインストールする時に、OSD(SD)だけにしてOSD(HD)を選んでいないことを思い出す。これは再インストール。で、インストールする直前に、バックアップするように促されて、そちらを選んだら保存してすぐに書き換え開始。再起動後、プリセットからバックアップをロードしたら、元に戻ってた。凄い。すると、選べるようになったけれど、プレビューの縦の寸法が小さい。これも、一旦児童にして、再度HDを選んだら、無事に大きな画面が選べるようになった。これで、Betaflightの問題も解決したので、組み立ての不具合を見直すことにした。順調、順調。次の週末には、飛べるんではないかと。。。
2024.11.17
コメント(0)
-
パソコン関連 ラズパイで外向けサーバ(その4)
無事に動き出しました。1.メールによる死活確認GMailから送信するには、アプリパスワードが必要なのだけれど非推奨?になったみたいでGoogleのメニューから追えなくなったので、備忘録https://myaccount.google.com/apppasswords2.https化あまり必要性は感じないけれど、格好良いので。https://qiita.com/HO_Pollyanna/items/aee45b25e2318d39157b内向けサーバにバックアップを取ったので、いつMicroSDが壊れても大丈夫。一応、壊れたらしい前サーバ(NAS)を復旧させるつもり。
2024.11.15
コメント(0)
-
ドローン Walksnail Avatar VRX と VTX 1SLite を買った(その1)
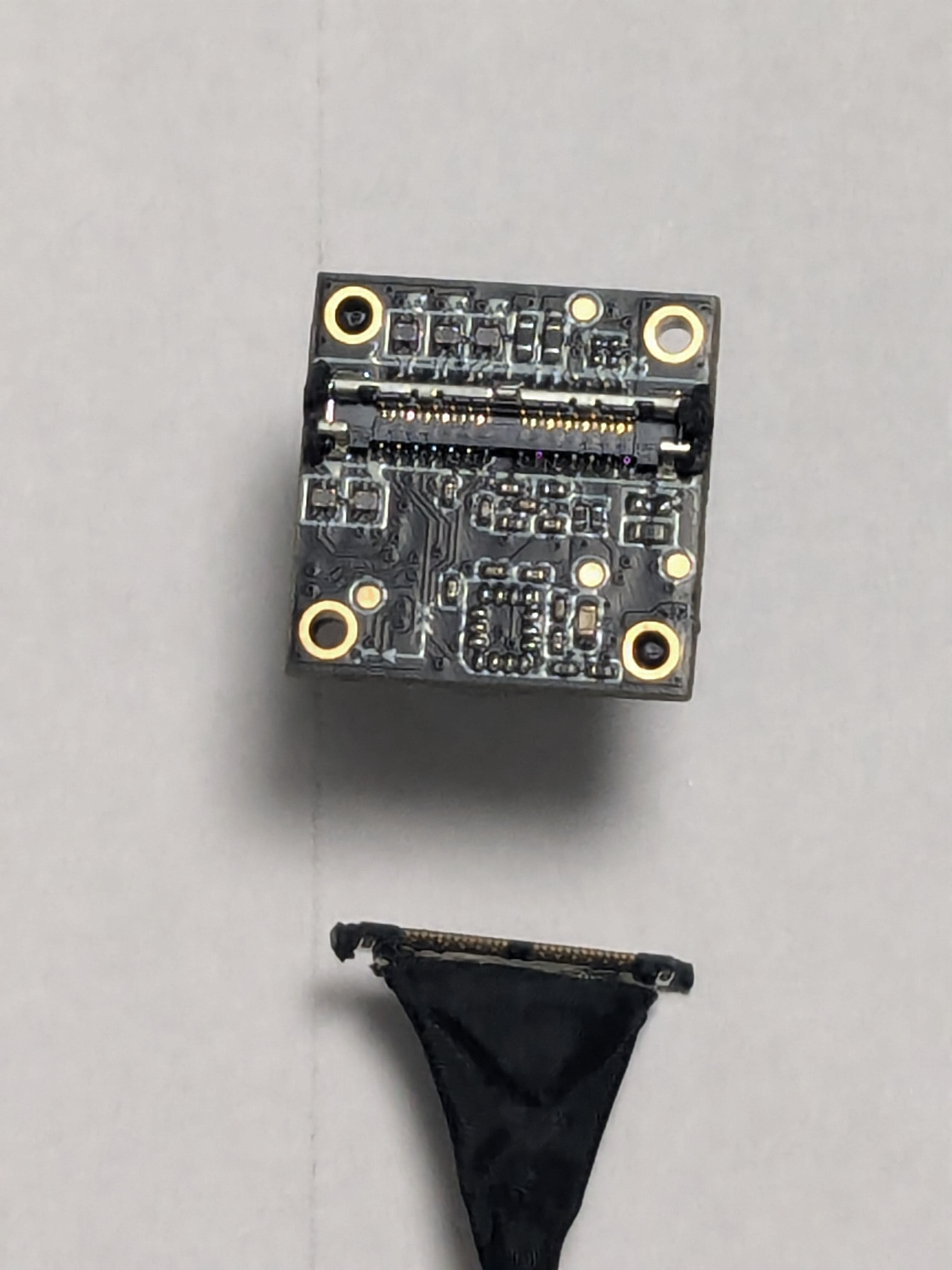
現状、屋内なら技適取得のおかげで、申請や登録なしで使えるようになったそうなので、頑張って買ってみた。これまでに遭遇したトラブルは以下の通り1.LinkしないVTXとVRXのバージョンを合わせないといけないらしい。私の場合はVTXのバージョンが古かったので更新したら、一瞬で無事に接続された。2.熱くなったLinkできたので観察していたら、接続後の画面のstatus欄に、overheetとか表示されてどんどん温度が上昇していった、130度まで目視して電源を抜いた。ところが、次回以降は発生しない。謎現象。3.カメラはコネクタの付いている方が上。4.コアキシャルコネクタの外し方コネクタの両端が黒い粘性のあるもので覆われているが、この部分を慎重に持ち上げると、ぱかっと外れる。カメラ単独の状態で、カメラマウントの部品を取り付けて元に戻した。念のためテープでカバーした。取り外した状態の写真が下の物5.AC電源だとエラー音が鳴り始める?12VAC電源でVRXを動かしているけれど、セル数のカウントができないのか赤文字になる。同時にエラー音が連続するけれど、こちらはVTXのセル電圧が3.5Vに低下したからかもしれない。検証継続。画面はとてもきれい、これを外で飛ばせないのがとても残念。送信するデータ量が多すぎて将来的にも難しい? 法的に何とかして欲しいところ。
2024.11.15
コメント(0)
-

ソコン関連 ラズパイPicoW で旋風機を操作(その2、完成!)
RaspberryPi PicowのWiFiをAP-Modeにして接続し、ブラウザからコントロールできた。スマホを機内モードにしてAPに接続すれば良い、手順は簡単。色々検索してソースコードを拾い集めて、数値を試行錯誤すれば、出来上がり。下の画像がスマホの操作画面、停止はPWMのduty比を設定して回転を停止させるもの、緊急停止はPicowのソフトリセット。まぁ、気休めかな。こっちはハードウェア。分解したドローンにサーボ、ESCは付いていたので、それらをPWMでコントロールするようにしただけ。ESCは起動時にduty比を小さくしておかなければならないのだけれど、picowが立ち上がる方が早くて、問題なかった。右下のボードから5Vを供給している。ESCには6sそのままなので22.4v。デルタスリーヒンヂ装備のローターだけど意味なし。実機はガバナーで回転数一定だったけれど、こいつは回転数もローターピッチも変化させている、じゃぁ固定ピッチでいいじゃないという突っ込みは無しで。以下はソースリスト===ここから## 旋風機コントロールアプリ for Picow v0.1 APMode ⇒ ok# v0.2 Bottun&Disp. ⇒ ok# v0.3 Batt.& SERVO ⇒ ok# v1.0 UIimport timeimport networkimport socketimport machinefrom machine import PWMled = machine.Pin("LED", machine.Pin.OUT)dispState = 'Status Unknown'# GPIO の設定step_SERVO = 0step_ESC = 0duty_SERVO = 33161 # 65535 の50.6% 1%増減では655duty_ESC = 5898 # 65535 の9%、0.5%増減では328pwm_SERVO = PWM(0, freq=333, duty_u16=duty_SERVO)pwm_ESC = PWM(7, freq=100, duty_u16=duty_ESC)# サーボの設定 周波数は333Hz ⇒ 3003μs、中立1520μsの時はduty比=1520/3003=50.6%# ESC の設定 周波数は100Hzと仮定 ⇒ 10,000μs、900μsの時はduty比=900/10000=9%# PicoWのSSIDとパスワードを入力ssid = 'Raspi-PicoW'password = '********'# クライアント表示のHTMLhtml = """<!DOCTYPE html><html><head> <meta charset="utf-8" name="viewport" content="width=device-width, initial-scale=1"> <link rel="icon" href="data:,"> <style> html { font-family: Helvetica; display: inline-block; margin: 0px auto; text-align: center;} .buttonGreen { background-color: #4CAF50; border: 2px solid #000000;; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 16px; margin: 4px 2px; cursor: pointer; } .buttonRed { background-color: #D11D53; border: 2px solid #000000;; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 32px; margin: 4px 2px; cursor: pointer; }text-decoration: none; font-size: 30px; margin: 2px; cursor: pointer;} </style></head><body> <center><h1>Raspberry Pi Pico W</h1></center><br><br> <form> <center> <button class="buttonRed" name="machine" value="stop" type="submit">緊急停止</button></center> <br><br> <center><button class="buttonGreen" name="ESC" value="stop" type="submit">停止</button></center> <br><br> <center> <button class="buttonGreen" name="SERVO" value="low" type="submit">弱</button> <button class="buttonGreen" name="SERVO" value="mid" type="submit">中</button> <button class="buttonGreen" name="SERVO" value="high" type="submit">強</button></center> </form> <br><br> <br><br> <p>%s<p></body></html>"""# Wi-Fi 接続実行ap = network.WLAN(network.AP_IF)ap.config(essid=ssid, password=password)ap.active(True)while ap.active() == False: passprint('Connection successful')print(ap.ifconfig())# ソケットを開くaddr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]s = socket.socket()# s.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1) s.bind(addr)s.listen(1)print('listening on', addr)# HTTPリクエスト処理、レスポンス処理while True: try: cl, addr = s.accept() print('client connected from', addr) request = cl.recv(1024) print("request:") print(request) request = str(request) try: request = request.split()[1] except IndexError: pass if request == '/?machine=stop': led.on() time.sleep(0.5) led.off() machine.reset() elif request == '/?ESC=stop': duty_ESC = 5898 duty_SERVO = 33161 elif request == '/?SERVO=low': duty_ESC = 7866 duty_SERVO = 29886 elif request == '/?SERVO=mid': duty_ESC = 8194 duty_SERVO = 29231 elif request == '/?SERVO=high': duty_ESC = 8522 duty_SERVO = 28576 pwm_ESC.duty_u16(duty_ESC) pwm_SERVO.duty_u16(duty_SERVO) ledState = "ESC " + str(duty_ESC) + " : SERVO " + str(duty_SERVO)# Create and send response stateis = ledState response = html % stateis full_response = 'HTTP/1.0 200 OK\r\nContent-type: text/html\r\n\r\n' + response cl.send(full_response) cl.close() except OSError as e: cl.close() print('connection closed')===ここまで楽しかったぁ! 次の遊びを考えよう!
2024.10.23
コメント(0)
-
ドローン 弐号機のrateProfile
やっぱり、弐号機のacroが安定しないので、ニュートラルの反応を鈍くすることにした、初期値70の半分で。STAB/Acro40/270/0 70/360/0Horzn70/800/0.1 70/360/0Org70/670/0 180/670/010月8日追記飛ばしてみたけれど、なんか違う。Angle/ForiznとAcroで分ける方向で再調整してみよう、と思う。Horzn ⇒ Angle/HorznAcro ⇒ 40/180/0 くらいで。BetaflightのWeb版試してみる?10月13日追記ANGLE/Horizon 70/800/0.1 Angleにはちょっと厳し目Acro 30/180/0 スティック倒してもANGLEだと動かないレベル
2024.09.29
コメント(0)
-
パソコン関連 ラズパイで測域センサーは苦戦中
タイトルのとおり、苦戦中。HOKUYOのUST-10LXなんだけど、pythonのライブラリーが上手く動かない。導入とか、IPアドレスとか、うまく行っていると思うのだけれど、timeoutが出てしまって先に進まない。センサーが見つからないと言っているここは、少し落ち着いて、Windowsでやってみようと思う。https://sourceforge.net/p/urgnetwork/wiki/top_jp/ROSって何?これは長引きそう
2024.09.16
コメント(0)
-
パソコン関連 ラズパイのCUI画面の解像度を下げる
ラズパイのHDMI画面出力だけど、一番高い解像度に合わせるみたい。手持ちのHDMIモニターは7インチしかないので、そんな1920X1080で出力されたら読めないくらい小さい。そこで解像度を落とすことにしたのだけれど、例によってNETの情報は古いみたいでその通りにならない。本家のドキュメントを頼りに、役に立つ情報を再検索したり、設定ファイルを覗いたりして、やっとわかった。環境:raspi OS Lite(64bit、bookworm)対象ファイル:/boot/firmware/cmdline.txtここに、kmsprintで得られたConnectionに対して、設定を書き込めばOK。このファイルは、改行してはいけないみたいで、行頭にvideo=HDMI-A-1:640x480@60と書き込めばよい。iiyamaのディスプレイだと最初からこの解像度になるし、HDMIモニターは最初は1920x1080だけど途中から640x480に切り替わる。手元の小さな画面にラズパイの出力が映し出されるのは、何となく格好良い!
2024.09.15
コメント(0)
-
パソコン関連 ラズパイPicoW で旋風機を操作(その1)
RaspberryPi PicoW を使って、旋風機を動かそうという計画。Pico に制御プログラムを入れて、ブレッドボードにキー入力の代わりのタクトスイッチを並べて、旋風機を操作しようと思っていたけれど、Wifi接続できるので、スマホから、ボタンやスライダーで操作できるようになるらしい。これは、ちょっと感動的な仕様だ。自宅のWifiに接続して、LEDランプをスマホから操作できることは確認できたので、あとは、1.独自のネットワークで接続できるのか2.ボタンやスライダーを使って、PWMで制御できるのかという2点。サンプルコードや結線方法など資料は集まるようなので、先行き有望。これは、楽しみなり。
2024.09.08
コメント(0)
-

パソコン関連 ラズパイでUltrasonicセンサーも動いた
LIDARに続いて、超音波センサーも動作した。同じi2cのデバイスだし、サンプルコードもあったので、比較的簡単な部類。参考にしたのはここ。https://github.com/ansarid/MB7040注意するのはgitコマンドはinstallされていなかった。展開されるファイルは、アドレスが0x70、自分の環境は0x71だったので、mb7040.pyの中身を1か所修正する必要があった。アドレスの確認方法は# sudo i2cdetect -r -y 1そのあとで# sudo python setup.py installサンプルの中にある、read_distance.py を実行するとxx cm xx.xx inという行がバラバラと表示されていく。次はHOKUYOのLIDAR UST-10LXだけど、これは手強そう。Windows版のViewerしかないみたい。後回しにするかなぁ。だとすると、3軸ジンバルが先?さっさと、LIDARをあきらめることにしよう、そうしよう。9/8追記こんなサイトを見つけた、いきなり有望?https://www.robotech-note.com/entry/2017/06/01/120800書かれているような状況を確認できたので、試そうと思ったら12v電源が無い。とにかく先行き明るいので、ぼちぼち進めよう。先に、Picoで旋風機を動かす方向で。
2024.09.06
コメント(0)
-
パソコン関連 ラズパイでLIDAR動いた
LIDAR-Lite v3は、無事に動作した。接続して、raspi-configで設定したけれど、接続を確認できなかった。i2cdetectなんて知らない、と言われる。i2c-toolsがインストールされていないみたいで、インストールしたら認識した。次は、python-smbusが見つからない。これも調べてみると、smbus2に代わっていて、インストールされていることが分かった。なので、import smbus2 とか、smbus ⇒ smbus2 とかして、無事に動作。アプリを動かしてみると、起動直後は数値が変。しばらくすると正しい数値を返すようになった。結構精度が良いみたい、さすがLidar。売り飛ばす前提だけど、しばらくは手元に置いておこう。
2024.09.04
コメント(0)
-
パソコン関連 ラズパイで外向けサーバ(その3)
ラズパイが一つしかないので、色々と寄り道しながら、理解を進めているところ。ラズパイはサーバのような長期定常運転するものには向かないらしい。それだけの安定性が無い、リセット、再起動必須のシステムのようだ。別に気が付いたら死んでいた、でも構わないので、どんどん進めようと思う。サーバの安定稼働が目的ではなく、ラズパイの勉強で知識を深める、楽しむのが目的なので。Wifiの設定は、最新のOSでは作法が変わったらしい、古いblogなどは役に立たない。同じく、固定IPの設定も役に立たない。IPv4はルータの設定で、v6は引き続き調査中。https://zenn.dev/technicarium/articles/9d3ee150a3cf04ここらあたりが手掛かりになるかも。DDNSの更新設定は、curlが動作するので問題ないだろう。メール送信は、ここを参考にして孫引き。つながるところまでは確認できた。https://note.com/rasen/n/n1c83449593a9apache2とphpは問題なく稼働。html関係もぼちぼち動作確認。ということで、現状でもサーバの移行はできるけれど、v6の固定IPの設定とメール送信が形になったら移行してみよう!8/31追記IPv6は、NetworkManegerを利用していることが確実だが、あるよ、と書かれているファイルが無い。何かを設定してみる?apacheを起動したので、ラズパイの死活確認がtty起動しなくてもブラウザからできるようになって便利。8/31追記2メールOK。あとは、内容を直すだけ。IPv6はここを見てできるようになった。https://qiita.com/maccadoo/items/84c8ebaa4ad541ccea3bこれで今のサーバと置き換える準備が整った。ということで、センサー遊びに戻ります。
2024.08.30
コメント(0)
-
パソコン関連 ラズパイをWiFi接続
つながらない、世の中の情報を元に設定してもダメ。64Bit Lite、3B(のはず、基板に技適のマークがプリントされている)。同じことを繰り返してもダメなので、別の方法が書かれているものを探して試してみた。https://qiita.com/hayat00/items/34d550de4ad38e455529ここの後半のwifiへの接続を行ったら、認識されるようになった。理由は不明。$ nmcli dev wifi接続をしたいSSIDはある。$ sudo nmcli dev wifi con SSID password PASSWORDSSIDとPASSWORDを自分の環境のものに変更する。$ nmcli conおー、なんかつながってる。再起動しても大丈夫、有線LANを抜いても大丈夫。しばらく、動かしっぱなしにしてみよう。なんか最新の方法は違うみたい。過去の情報を参考にするのは、こっちを見てからにしよう。https://www.raspberrypi.com/documentation/computers/configuration.html#raspi-config
2024.08.25
コメント(0)
-
パソコン関連 ラズパイでGPS、Lidar
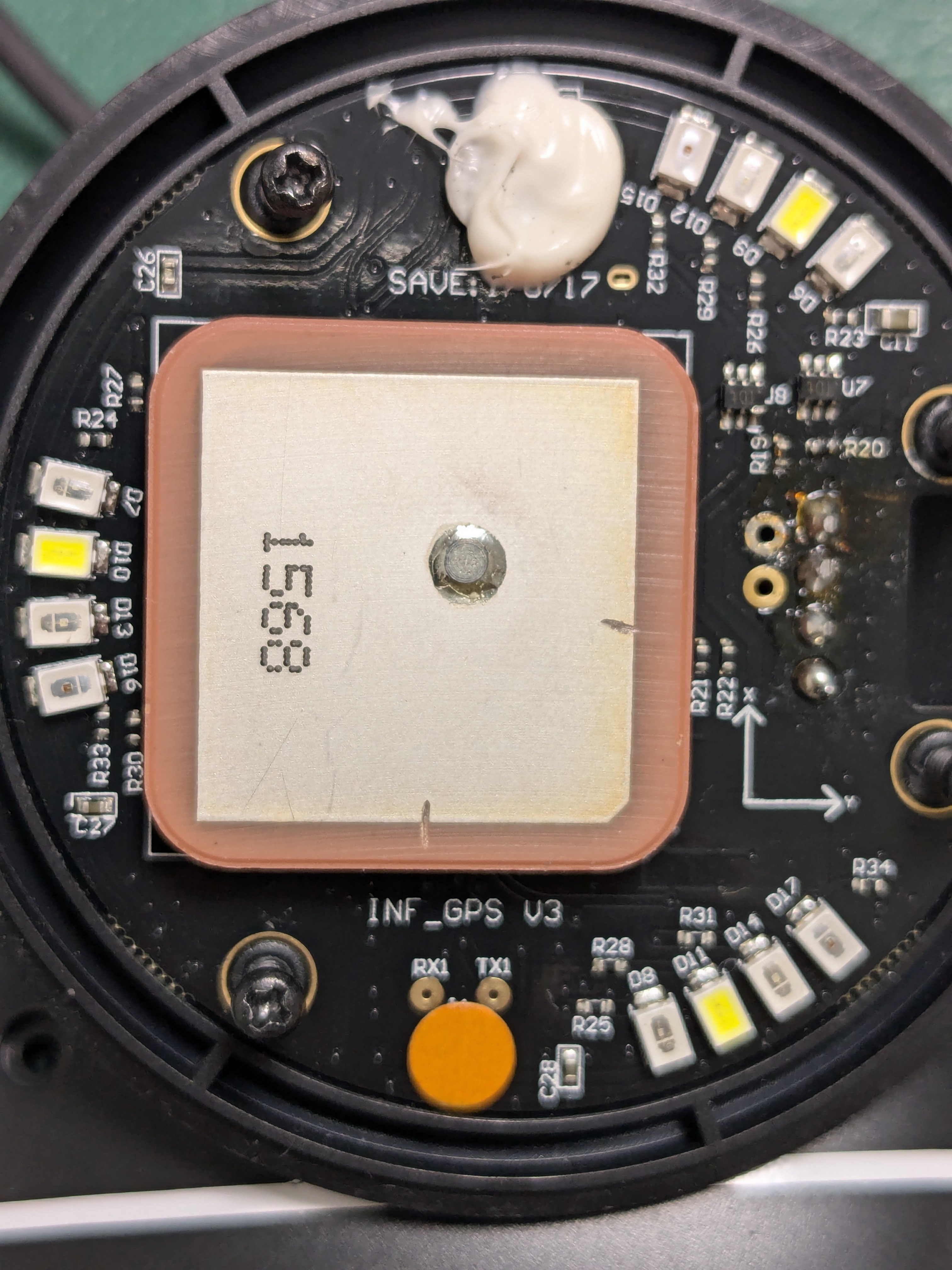
扇風機(旋風機)に終止符を打って、次はGPS。下の写真が、元々ドローンに付いていたものだけれど、データが見つからない。アンテナの右に4端子分の接続があるけれど、GrnとかBluとか印刷されていて、何のことかわからない。Tx、Rxはアンテナの下にあるし、、、LEDらしきものいっぱいあるけれど、5V電源に接続してもうんともすんとも反応しない。ということで、こいつは早々にあきらめることにした。次はLidar。こいつはちゃんとしたものらしくて製品名を検索してみると沢山の情報が出てくる。ん?、25k円?。これは適当な用途が見つからなかったら売り飛ばす?役に立ちそうなサイトはここhttps://faboplatform.github.io/RaspberryPIDocs/thirdparty/lidarlite/これは、先行き明るい。
2024.08.25
コメント(0)
-
パソコン関連 ラズパイで扇風機(その3)
動いた!大ボケをかましたあと、無事に動作した。わずかな回転でも、凄く風が来る。その様子がこちら。https://www.facebook.com/share/v/MYt3uVKYqSpP8Qur/ラズパイ3では過剰品質なので、ピコの勉強をする予定。物は手に入れた。
2024.08.21
コメント(0)
-
パソコン関連 ラズパイで扇風機(その2)
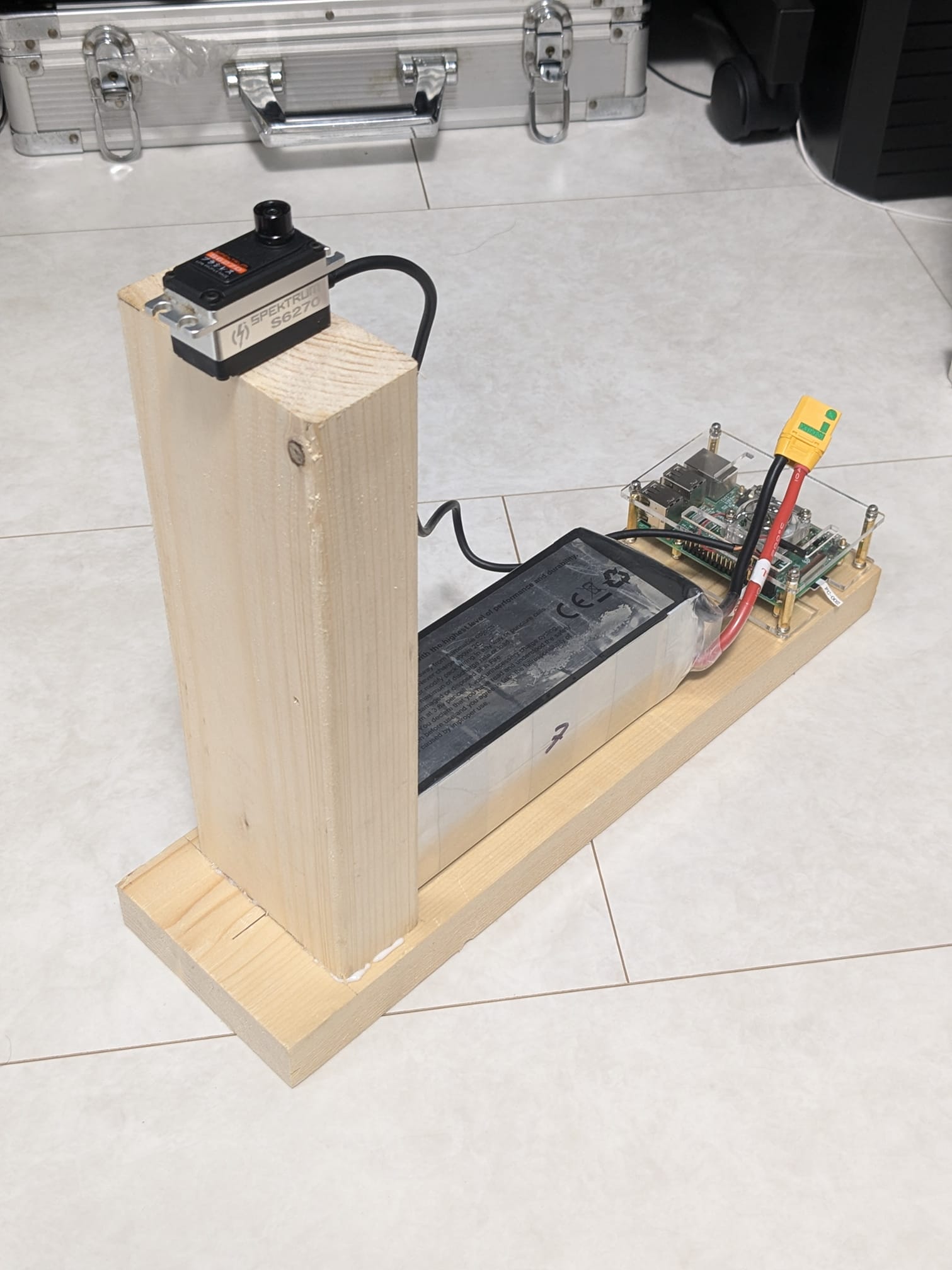
アームを固定する方法を考えていたけれど、電源としてLipo使うことにして錘代わりにするアイデアから、2x4材を使って組み立てて、それに金具ではなくタイラップで縛り付けることにした。木材を組み立てて、Lipoやラズパイを置いて、サーボのケーブル長を確認したのが以下の写真。お盆休み明けに会社に行ったら、1.アームを縛り付ける2.LipoとESCの配線をネジで木材に止める。3.結線した時点で記念写真。4.試運転という段取り。懸念点は、ESCをコントロールできるか、モーターが回るか、サーボをコントロールできるか、の大きく3つ。特にESCは5Vの電圧が出せないので、動くかどうかとても心配。ここでつまずくと何らかの方法で5Vを調達しなければいけない。今のところ5分5分かなぁ、動けばいいなぁ。
2024.08.14
コメント(0)
-

パソコン関連 ラズパイで扇風機(その1)
外向けサーバは中断して、先にラズパイで扇風機を作って遊ぶことにした。写真のものは、ドローンのモーターとアームの部分。ローターをくるくる回せば扇風機になるだろうという発想。このドローン、可変ピッチのローターを装備していたもので、単にESCをコントロールしてモーター回すだけではなく、サーボを動かしてローターピッチを変えなくてはいけない。おそらく世界初、デルタヒンジ装備可変ピッチローター式扇風機を目指している。既にサーボを動かすことには成功している。HDMI出力も確認した。残る作業は以下のとおり。1.ラズパイアプリの製作(多分、できた)2.手に持っているアームを固定するための金具、仕組み作り3.モーターを回す電源(Lipo6s)、配線、ESCとの結線、ラズパイとの結線4.試運転試運転で動いたら、動画を取って終了の予定。使い続けるつもりはない。センサーとして、GPS、レーザー距離計、超音波距離計、Lidarがあるので、それらで遊び終わるまでは動かしているかも。そのあとは、外向きサーバに戻る。
2024.08.13
コメント(0)
-

パソコン関連 ラズパイで外向けサーバ(その2)
ケースに入れて組み立ててみた。Hubの上に置いてLANケーブル接続。OSは64Bitの最新版Liteを選んだ。インストールは簡単で問題ない。Wifiの設定をしたつもりだったけれど、上手く動作しなかったので、有線接続。Windowsから ping してアドレスを確認してからputtyで接続、無事に開通。問題はこれから。ファイルを移して、apache いれて、動作することを確認してから、ローカルアドレス固定して、mydnsの設定を移して、現在のサーバと入れ替え、という手順かなぁ。raspberryのファイルシステムって2つしかなくて、FirmwareとRootだけで、あとはtmpfsになっている。swapは無いんだ。ちょっと頑張らないと、先が見えない。<追記>終了させるには$ sudo shutdown -h now して、コードのON/OFFスイッチで切る。再度起動するときは、ON/OFFスイッチで立ち上がる。今は29。miniHDMIケーブル用意したけれど、多分要らない。
2024.08.06
コメント(0)
-

パソコン関連 ラズパイで外向けサーバ(その1)
ラズパイのボードを手に入れた。3 Model B V1.2 というバージョンらしい。合わせて256GBのMicroSDカードも手に入れた。色々と考えたけれど、安直に、今NASで構築している外向けサーバを置き換える方向で進めることにする。で、色々と情報収集。MicroSD256GBは使えるらしい、64Bit版が使えるらしい。OSの導入は簡単らしい。なのでLinuxの起動までは問題なく進むと思う。あとは、今のサーバが行っていることが実施できるかどうかやね。とりあえず、電源(5V3A)とケースを注文しておいた。お盆休みの楽しみである。
2024.08.03
コメント(0)
-
熱帯魚 2階の水槽にファン設置
閉め切った2階に置いてある、カルキ抜き用の水槽の水温が30度を超えている。幼いランプアイとミッキーさんが住んでいるけれど、これでは可哀想。12VのACアダプタが余っている。壊れたATX電源があるので8cmファンが余っている。これは作るしかない、ということで仮組立てしてみた。安い8cmファンを買い足して2連で回してみたら、ATX電源用は電圧で回転数をコントロールしていたみたいで、電源に直結すると唸りを上げて爆速。そのせいか冷却効果抜群で、室温-5℃くらいの感じ。ということで、仮組立てではなく、本格運用に向けて組み立て直す予定。そうしたら写真もつけよう、大した写真じゃないけれど。写真は以下のとおり。上部フィルターとLED照明に乗せる感じで木枠を作って、その下にファンをぶら下げる感じ。
2024.07.08
コメント(0)
-
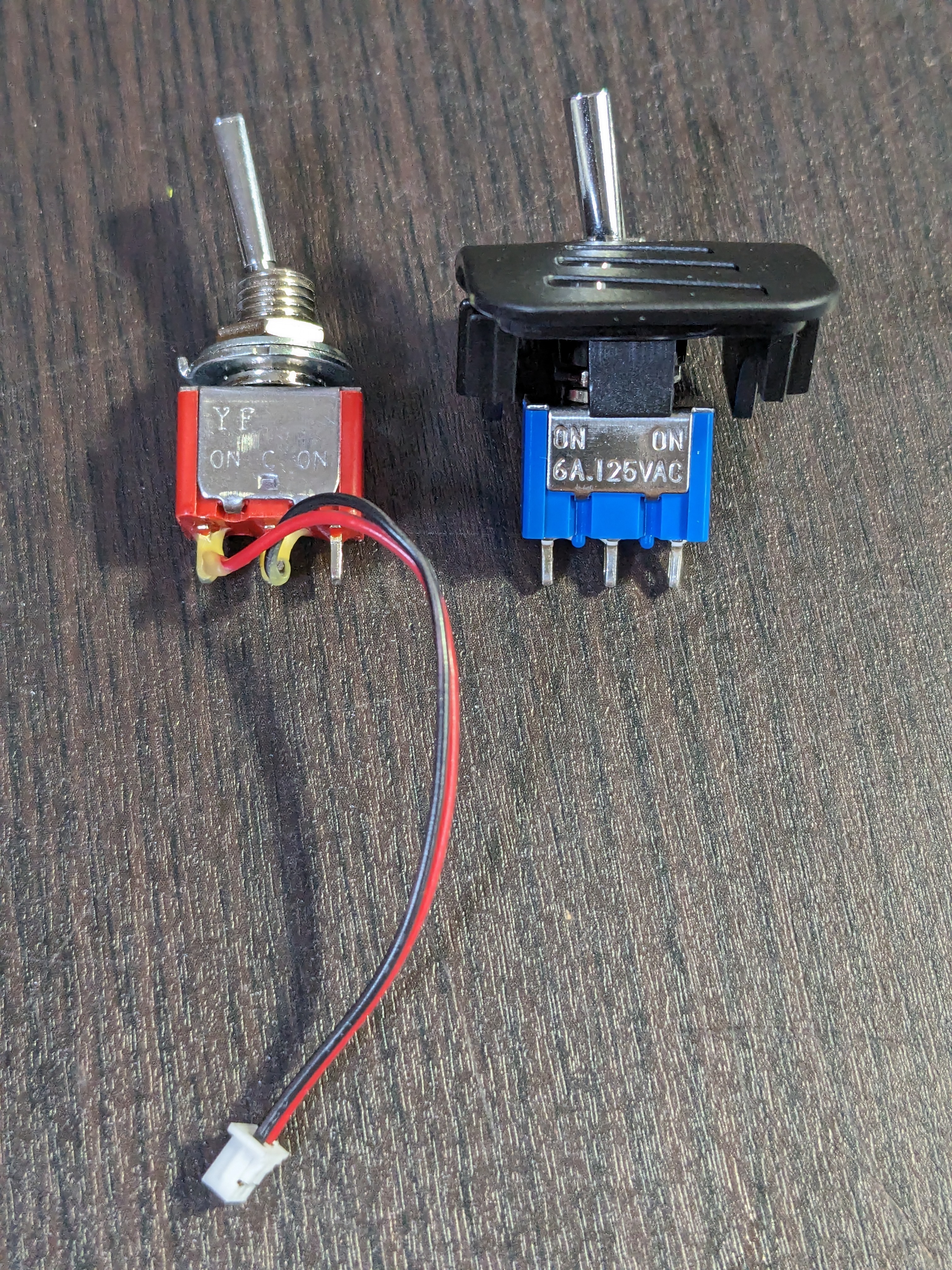
ドローン Jumper T14 (追加)
結局、右肩のスイッチもモーメンタリーに交換することにした。marutsuで、型番MS500BF、秋葉原本店で購入。521円。この写真のように、真ん中が黒、奥に倒れた状態の方に赤を結線すると良い。動作を確認したら、ちゃんと「Timer1 Reset」とお姉さんがしゃべってくれた。両肩トグルスイッチで、T12Proと同じ操作性、これでいいのだ。
2024.06.20
コメント(0)
-

熱帯魚 アフリカンランプアイ お引越し準備
アフリカンランプアイさん、少し大きくなってきたので妻の勤務先にお引越し準備中。寒くなってきたら戻ってくる予定。本水槽のミッキーさん、1匹☆彡に。今は3匹。ラスボラさん長生き。
2024.06.09
コメント(0)
-
熱帯魚 CO2 再設定
2階の予備水槽で運用中の、CO2 化学式 のクエン酸タンクが空になったので、再設定。大体、1か月くらいの運用期間だけれど、安定してきたので時間を図ることにしたので、日記化。今日は2024年5月24日。クエン酸120g(100均の最近のパッケージ)に360gの水、重曹120gに120gの水。バルブの開け具合を設定して、すぐに運用開始。大体5秒に1回くらいで、LED照明のタイマーに合わせて電磁バルブを接続しているので1日12時間。苔が生えたら、1階の本水槽に降ろすとミッキーさんが食べてくれるので綺麗になる。エビさんではなくミッキーさんが食べてくれる、変なの。ということで様子見。
2024.05.24
コメント(0)
-
ドローン Betaflight4.5 のメモ
手持ちの機材での不具合V4.5だと、BetaFPV F4 1S AIO V2 + TBS Unity Pro 5G8 の組合せだと、Softserialに設定されているSmartAudioが機能しない。BetaFPV M02 だと動いていた。V4.4.3だと動くので元に戻した。RateProfileの挙動がだいぶ違う。V4.4までは、Angle、Acroともに緩い設定(90/180/0.0)が4.5だと更に緩くなってスティック一杯に動かさないといけない。デフォルト値のでうまく機能する感じ。なので、rate1:デフォルト値rate2:70/900/0.3のFlip用rate3:70/360/0.0の緩い設定(360は今後調整)で統一してV4.4ならrate3で、v4.5ならAngleはrate1、Acroはrate3という使い方にしようと思う。V4.4は初号機(録画用)、参号機(変更するのを面倒がっているだけ)v4.5は弐号機(LOS会社用)、四号機(軽量お遊び用)という状況。EZLanding 多少効く程度、ふんわり降りるのはLOSでも難しい。それにしてもTBS 雑音が無くて静かだなぁ、距離による乱れにはそれほど差は無かったと思うけれど、、、
2024.05.02
コメント(0)
-
ドローン BetaFlight 4.5 公開
正式版が公開された。AngleモードとHoriznモードが大きく変わったらしい。というか変わった。ヨーだけで旋回してくれる。Rateの効きが全然違う。これはしばらく飛ばして調整が必要と思った。AngleとAcroでRateProfileが変わるのは嫌だなぁ、そうなりませんように。HoriznのRateはオリジナルのままで良いような気もするが、とりあえずEXPO=0.3はそのままにしておこう。Airモードで着陸時にポンポン跳ねていたのが抑えられるらしい。>This is a newly developed feature, CLI only, that makes landings less bouncy, even when airmode is on. >set mixer_type = EZLANDING戻す時には、LEGACY。ちなみに、色々なアプリの定点観測。Betaflight : 4.5.0EdgeTX : 2.10.0-RC3 CenturionExpressLRS : 3.4.0-RC3Multiprotocol : 1.3.4.0 Airというやつ
2024.04.29
コメント(0)
全1253件 (1253件中 1-50件目)
-
-

- アイフォン・アイポッドの必需品
- スティーブ・ジョブズの死に際に発し…
- (2025-07-14 03:41:24)
-
-
-

- 楽天ラッキーくじ
- 楽天ラッキーくじ更新情報(2025/11/…
- (2025-11-14 21:24:42)
-
-
-
- 楽天ブログいろいろ
- 11/13に237万アクセスになってたみた…
- (2025-11-15 12:00:06)
-



