

2026年03月の記事
全5件 (5件中 1-5件目)
1
-

Rally-Com Driverモード開発中
先日のアベレージラリー体験会で、ラリコンアプリ「Rally-Com」を使った試走を行いました。2走する内の1走目は、タブレットをセンターコンソールのディスプレイオーディオのパネルに吸盤で貼り付けていたのですが、2走目はタブレットを助手席側のダッシュボードに設置しました。体験会は、ナビを私が行い、ドライバーは長男だったのですが、「2走目になってタブレットが遠くなったから、距離やペース配分が見えなくなったので、細かく指示して欲しい」と。この時はナビが私だったので、指示を細かく行うことで解決したのですが、かみさんがナビ、私がドライバーになったら、かみさんは同じことができないだろうなぁ・・・と。そうなると、やはり他の方もやっているように、ドライバー側にもスマホで表示できた方が便利だなぁ・・・と。最初に思いついたのは、スマホとタブレットをwifiで繋いで画面をミラーリングする方法。ただ、処理が重くなるのと、遅延が気になります。バッテリーの持ちや、夏場の発熱も気になります。そんなわけで、ミラーリングは断念しました。他に何か方法ないかなぁ・・・と考えていたのですが、Rally-Comで表示している情報の内、一部の情報だけをスマホに飛ばして簡易表示させることはできないかと考えました。Geminiに訊いてみると、意外と簡単にイケそうな感じなので、早速作ってみました。新たにDriver modeと命名。使い方はいたってシンプル。ドライバー側のスマホ(子機)でアプリを立ち上げ、メインメニューでDriver modeを選択すると、事前にBluetoothペアリングしたリストが表示されます。この状態でナビ側のタブレット(親機)でアプリを立ち上げて、設定画面でBroadcasting modeをonにすると、2つのデバイスがBluetooth接続され、子機でDriver modeの画面が立ち上がるという感じ。Bluetooth接続なので、若干のタイムラグが発生するのですが、0.1秒あるかないかという感じなので、許容範囲かな?と。表示させるのはペース配分と、ODO、Trip1/Trip2のみ。途中でBluetooth接続が切れちゃった場合でも、自動で直近接続したデバイスと再接続を試みます。これをドライバー側に設置すれば、ドライバーとしても楽かな?と。デバッグしたらv1.2.0としてアップします。
Mar 31, 2026
コメント(0)
-
Rally-Com v1.1.0公開のお知らせ
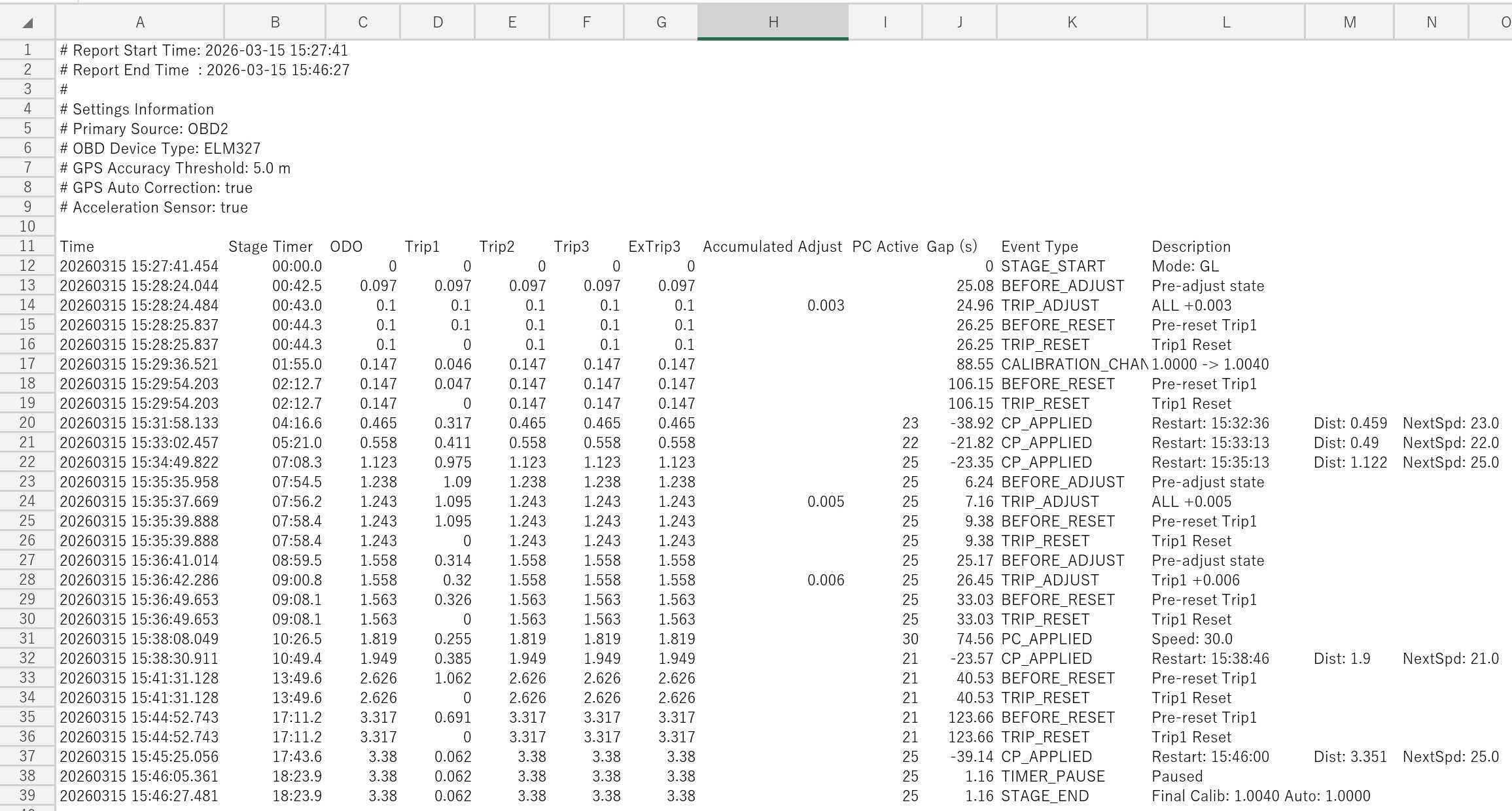
デバッグ終わったので再公開します。Android用OBD2ラリコンアプリ Rally-Comのv1.1.0をアップしました。今回の変更点は以下の通りです。1. Stage Reportの内容を充実2. Drive RallyモードのGPXファイルおよびStage Reportの保存方法の変更3. OBD2、GPS共に接続されていない時は加速度センサーも使用しないように変更今回の目玉は1のStage Reportの充実です。今までtextファイルでしたが、今回csvファイルに変更しましたので、Excelで開くことができます。PCで速度変更した時の距離や、各Tripの補正数、CPボタン押した時の理想の到着時間とのギャップはもちろん、各アクションを起こした時のギャップも記録します。補正はボタンをタップする毎に0.001km、長タップで0.01kmずつ補正しますが、レポート上では10秒間の間に補正した分をひとまとめにして1行で記載するようにしています。また、リセット直前のtripやODOを記録するようにしているので、コマ図毎にどれだけズレてるかも分かりやすいと思います。これでGPXファイルと合わせると、ラリー後の反省会がやりやすくなると思います。2はこれまで分かりにくかったので、分かりやすくしたつもりです。3の条件は本来ありえないのですが、どちらも接続していない状態で加速度センサーのノイズによるドリフトをどうしても抑え込むことができず、静止しているにもかかわらず、速度やODO/Tripが増加してしまっていたので、いっそのことカットしてしまおうと。まぁ、OBD2もGPSもどちらも使わない状態って、ありえないと思うんですけどね。その他、加速度センサーがたまに悪さすることが分かったので、それを封じ込めるのに手こずりました。詳細は改訂版のマニュアル(20260315版)をご確認ください。あ、マニュアルも色々追加しました。今や31ページもあります(苦笑)一応、v1.0.0も残してあります。 ダウンロードはこちらから
Mar 14, 2026
コメント(0)
-

Android用ラリーコンピューター「Rally-Com」公開のお知らせ
アベレージラリーやドライブラリーの参加者を広げることを目的として、自作のAndroid用ラリーコンピューターアプリ「Rally-Com」を野良アプリとしてGoogle Drive上に公開します。本アプリは、アベレージラリーやドライブラリー用に開発したもので、車輛に接続したOBD2アダプタとBluetooth接続で得られる車速データをベースに、GPSや加速度センサーによってデータを補完しラリー競技に必要な距離計測やペース管理を行うためのものです。※ OBD2アダプタと未接続の場合は、GPS+加速度センサー測位で計測します。元々海外製のGPS測位型のラリコンアプリを使用してアベレージラリーに参戦していましたが、走行後のGPXファイルを確認すると、林道走行が多い日本のコースでは、GPSの跳ねが頻繁に発生していて計測距離の誤差が大きいことが分かりました。これまで、GPS測位のサンプリングレートを上げる等の対策も行いましたが、諸々の使い勝手の問題などもありまして、シロウトながらAIを駆使しながらアプリを作成した次第です。【特徴】l 3つの動作モード:競技形式に合わせて「Drive Rally用」「Average Rally用(グローバル/日本)」の3種を選択可能です。l 高精度な距離測定:ü 別売りのBluetooth接続OBD2アダプタ(ELM327 / OBDLink等)から車速情報を取得し、距離を計算します。ü GPS測位および加速度センサーにより、距離の自動補正や単体での測定が可能です。l ペース指示:理想到着時間(Ideal Time)とのギャップ表示や、ペース変更の指示機能を有します。l データ管理:走行データをGPXファイルやTXTファイルで保存できます。 ※ ボタンのレイアウト上、横画面(Landscape / Horizontal)での使用を推奨いたします。<メインメニュー><Drive Rallyモード>距離の計測のみを使用するモードです。<Average Rally GLモード>走行前にSpeed Chart(距離、指示速度 等)をプリセットするモードです。<Speed Chart><Average Rally JAモード>事前のSpeed Chartプリセットを必要としないモードです。<設定画面>本アプリのダウンロードおよびインストールは自己責任で行ってください。Google Drive内に保存されているapkファイルをダウンロードしてインストールしてください。また、使用にあたっては同じフォルダ内にあるマニュアルを必ずご確認ください。OBD2アダプタとECUとのデータ交信方法は自動車メーカー、車種によってさまざまです。本アプリでは接続できないケースがあることをご了承ください。インストール用apkファイルとマニュアルはこちらからDLしてください。※ 将来的にGoogle Playに登録した場合、本Google DriveからのDLは終了させていただきます。基本的に自分用に開発したものですので、コメントなどで機能追加などのご要望をいただいても対応は致しかねます。本格的にアベレージラリーに取り組む際には、ARM productsが販売しているラリーコンピューターの導入もご検討ください。なお、同社はアプリも作成しています。
Mar 10, 2026
コメント(2)
-

アベレージラリー体験会
本日は茨城県牛久市周辺で、JMRC茨城ラリー部会主催のアベレージラリー体験会です。思えば昨シーズン、全く無知の状態から関東デイラリーシリーズに参戦。第1戦の受付で簡単なレクチャーだけ受けた状態で、あとはもうほぼ独学で、周囲の参加者に都度質問しながら経験値を増やしてきました。確か昨シーズン開始前にも体験会はあったと思いますが、日程的に参加できなかったんですよねぇ。なので、今回は座学含めてじっくりとアベレージラリーを学ぶよい機会だということで、参加させていただきました。ただ、残念ながら町内会の仕事があってかみさんの参加がかなわなかったので、今回は長男にドライバーを依頼して参加しました。そもそもホントは昨年も長男と参戦するつもりだったのですが、都合が合わなくてかみさんと参加したのが始まりだったんですよねぇ。なので、普段ナビをやっているかみさんのためにも、本日は色々と吸収して帰ろうと考えていました。そして何より、実際のアベレージラリーの中で、自分が新たに開発したラリコンアプリ「Rally-Com」がどれだけ使えるのか、本戦で使用する前の良いテストになるだろうと。実は先日「完成した!」と高らかに宣言した後も細かな修整を加えまくっていて、結果的にエラーが出まくって昨晩までデバッグやってたという状態だったんですけど(爆)。終始笑いっぱなしの座学を1時間程受けた後、いよいよ実際に走行します。今回はOMCP、3つのCP、2つのパスコンがある約30kmのコースを、午前に1回、昼休憩と2回目の座学(1回目の走行後の質疑応答)後に、さらに同じコースをもう1回走行するという流れです。1回目の走行では2図でいきなりミスコースをするというトラップに見事に引っかかりましたが、その後リカバーして、正解に対して1CP : +2秒2CP : -2秒3CP : +1秒で、合計ペナ5というなかなかな成績。結構バタバタしたけど、自作アプリの素性の良さが分かりました。こりゃ、2回目はペナ0×3も夢じゃないんじゃね?なんて思いながらの2走目。車内のオペレーション的には非常にスムーズだったのですが、結果を見てみると、1CP : -12CP : -53CP : +4で、合計ペナ10って、まさかのペナ増えてるし・・・(涙)。まぁ、1走目も2走目も参戦しているCクラスなら各CP10秒未満なので、ペナは全部0なんですけど、やはり上のクラスを目指すなら、可能な限り0秒を出したいところですね。こうなると走り方と、コマ図毎の補正のやり方を変えるしかないと思うんですが、何が正解なのかなぁ。いやぁ、参りましたね。アプリの方は大きな問題はないものの、ミスタッチを起こしにくくする為にUIの設定をいくつか変更した方が良さそうな事が分かったので、そこだけ修正したいと思います。
Mar 8, 2026
コメント(0)
-

自作アプリで試走
Drive Rally / Average Rally用自作アプリ、「Rally-Com」の目途が立ったので、ちゃんと動くのか試走して使ってみることに。いきなりIdeal Timeとのギャップとか、ペース配分指示の完成度を確かめる前に、そもそも距離の測定が問題ないかを確認するのが先決だってことで、まずは第一弾として、過去に走ったDrive Rallyのコースでオフィシャルの走行距離や前回の自分の走行距離と比較することにしました。ちなみに、第二弾は3/8に茨城で開催される初心者向けのアベレージラリー体験会でアベレージラリーで試走する予定です。というわけで、やってきました某所。A:右側ディスプレイオーディオ:1Hz GNSS測位B:左側タブレット:OBD2アダプタ(ELM327)+10Hz GNSS測位+加速度センサーのマルチ測位という設定で走ります。前回は既存のアプリで1Hz GNSS測位で計測していますから、前回とAを比較すれば、同計測方法でのアプリの差AとBを比較すれば、同アプリで計測方法の差を検証することができるという感じです。OBD2アダプタは、OBDLink MX+を使用する予定だったのですが、何故か認識しないという問題が発生し、仕方がないので先週アプリ開発用に購入したELM327を使用します。なので、このアプリの本領を発揮したモードではないのですが、まぁ、一般的な使用方法なのかな?と。途中、道路工事があったり、6CP:CPの目印地点に他車が止まってて計測困難9CP:イベントで駐車場が使われてて入れないとかありましたが、クイズは前回やってるので、単純に距離計測のみ集中して実施しました。で、検証に入る前に、前回の走行結果について、少し振り返りと訂正を。前回は、このような結果だったのですが・・・実は年末にアプリ開発者とチャットでやり取りをしている時に、Calibration Factorについて誤解があったことが判明しました。今まで使っていたアプリでは、「Calibration Factorは測定、積分したTripにCalibration Factorを単純に乗算している」と教えてくれました。Calibration Factorって、OMCPにおけるオフィシャルと自車の走行距離から算出しますが、CF = 自車OD / オフィシャルODって教わると思うんです。例えば、コマ図に記載のOMCPまでの距離が5.023kmで、自車のODが5.016kmだったら、CF = 5.016 / 5.023 =0.9986で、一度アプリにCFを設定したら、あとは自車の走行距離÷CFの数字をTripとして表示してくれれば良いわけです。例えば、自車が実際に10.00km走ったら、10.00 / 0.9986=10.014kmがTripとして表示されるという具合。そうすれば、この表示距離がコマ図に記載されている距離と同じになった時に交差点が現れればOKという訳です。ところが、アプリ開発者は、「単純にCFを乗算している」と。( ゚Д゚)ということは、CFの計算は、CF = 自車OD / オフィシャルODではなく、CF = オフィシャルOD / 自車ODというように、逆にする必要があります。先程の例で言うと、CF = 5.023 / 5.016=1.0014という訳です。これなら、自車のTripに乗算しても10.00km × 1.0014 = 10.014kmということになります。これまで1年間、CFを逆の状態で計算してアプリに入力していたことに気が付いた、というワケ。終わったシリーズのことを言っても仕方がありませんが、気が付いた時には流石に愕然としましたよ。さて、何が言いたかったかと言うと、前回ドライブラリーをやった時の結果も、間違っていたわけですよ。前回のOMCPの時の距離は、オフィシャル:5.452km自車:5.46kmで、CF=1.001467として計算していました。この間違ったCFをアプリでは乗算していたということなので、前回の走行結果を1.001467で割って、アプリで使用すべき本来のCF=0.9985を改めて乗算する必要があります。結果として、各CPでペナが1ずつ減って、少しオフィシャルとの差が縮まりましたが、全体からしたら大した改善ではなく、やっぱり「GNSS測位のラリコンはドライブラリーには使えない」という評価は変わらないと思います。で、今回試走した結果はどうだったか?というと・・・このような結果になりました。作成したアプリは、小数点以下第三位(mオーダー)まで表示できるので、四捨五入しています。まず、前回と今回、共にGNSS測位だけどアプリが違う2つで比較してみると、GNSS測位だと林道で誤差が大きくなるというのは、前回と一緒。今回は、前回よりもさらにペナが悪化しています。とはいえ、赤字に書いたのは前述した通り、CP処理がきちんとできなくて、目算で調整したところなので、ホントはもう少しマシだったかもしれません。そして、今回の2つ、マルチ測位とGNSS測位で比較してみると、OBD2+GNSS 10Hz+加速度センサーのなんと優秀な事か。今回のコースのドライブラリーに参加した方のリザルト表と比較してみると、汎用のELM327を使ってでも他の方と勝負できそうな成績ですから、より高性能でELM327ではできない補正を組み込んでいるOBDLink MX+なら、結構イケるんじゃないかと。最終的には本命の3/8のアベレージラリー体験会で使って問題ないようだったら、マニュアルと併せてapkファイルを公開したいと思います。残念ながら新規個人デベロッパーの参入は敷居が高い(20人以上、14日以上の事前デバッグが必要)ので、今の所Google Playには登録しない予定です。ちなみに、マニュアルはこんな感じ。
Mar 2, 2026
コメント(2)
全5件 (5件中 1-5件目)
1
-
-

- アニメ・特撮・ゲーム
- 「黄泉のツガイ」第五話「兎と亀」
- (2026-05-03 11:15:56)
-
-
-

- フォトライフ
- 源氏物語〔34帖 若菜 216〕
- (2026-05-03 10:33:05)
-
-
-

- フィギュア好き集まれ~
- 「トランスフォーマームービー TS-18…
- (2026-05-01 07:34:12)
-



