

2011年07月の記事
全9件 (9件中 1-9件目)
1
-
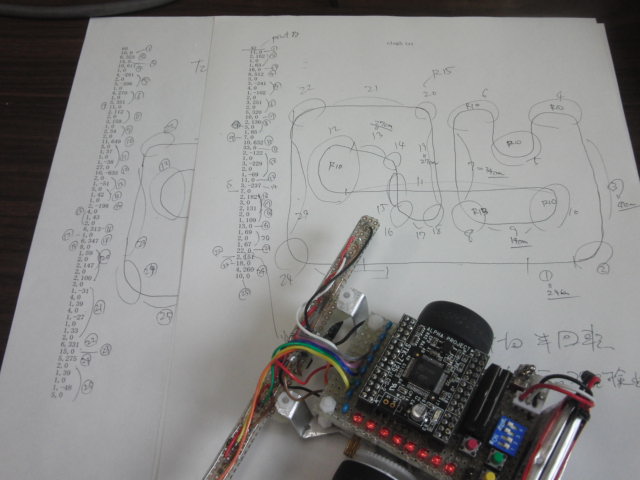
ロボトレースの製作その13,コースログ
コースログ取る機能を付けました.直線とコーナーに分けて,それぞれ距離と左右回転の差を記録しました.ターン中に曲がりすぎから補正をかける部分で直線と間違って記録されますが,コースの追従性をあげていけばより正しくログが取れるようになると思います.R10のコーナーで最少速度,Rが大きいコーナーでは速度を上げて,直線で加速・減速を組み入れてライントレースさせれば,それなりに速くなりそうです.あとは,コースの追従性をどこまで上げられるか,その後,センサ幅を有効につかってライン取りを可変してショートカット,ができないかな.
2011.07.27
コメント(0)
-
アナログ放送終了.
学生時代に勉強した本を記念にアップ.昔買ったカラーテレビには回路図もついてきてたので,見比べながら勉強してました.これからはデジタル放送の時代↓【送料無料】IPTV時代のデジタル放送教科書
2011.07.25
コメント(1)
-
ロボトレースの製作その12,地味にプログラム中
雑用に追われ,最近更新してませんでしたが,地味にプログラム作成中.マーカーの先読みをやってないので,ターン速度上限が直線スピードの上限.そこそこ速度を上げたいと思ってパラメータをいじるがふらつき納まらず.ログを取って考えるが,どうやら最初に考えたモータ制御と走行制御の区分けと機体の構造に原因があるようで,いちからやり直す気力と時間がないので今回はそのままで行く.マーカー検出は結構面倒.ラインがクロスするところで右マーカー検出が反応するので,直線連続区間である条件かつ時系列に左右のマーカーを読み取って孤立的に右マーカーのみが反応したときをスタート,ゴールと認識するようにした.同時に,直線距離と,ターンの距離と左右タイヤ回転差から半径を求めて記録していくプログラムを作り始めたところ.ロボトレース,マーカー検出できた動画
2011.07.22
コメント(0)
-
ロボトレースの製作その11,位置をアナログ値で読み取り
ライン上の位置をディジタル値で読み取ってモータ制御を作っていたのですが,センサの間隔が広すぎて走行中に振動を起こす原因がモータ制御が悪いのか,それとも位置検出の幅が広いためなのか判断できません.なので最初の計画通り,ライン上の位置をアナログ値で読み取ってより細かい位置分解能を得ることにしました.プログラムを組んだらどうやらうまく出来たようです.センターを0として-70から70の値をLEDに出力する動画
2011.07.12
コメント(0)
-
先輩発見!
大学のころの先輩のブログを発見したのでブックマークに追加.
2011.07.11
コメント(0)
-

マイクロマウスが学生実験に取り入れられました.
某学校・某学科の学生実験にマイクロマウスが取り入れられました.クラス全員でマイクロマウスを1台ずつ作って同時に走行試験をしているところ.16×16の迷路を8×8の4区画に分けて,タイムを競い合っています.
2011.07.11
コメント(5)
-

ナツメ球の代わりのLED電球を自作してみた.
ナツメ球が切れました.なのでガラスを割ってみました.100kΩの抵抗とLEDを接続して100Vかけたら,1mAくらい流れてほぼ抵抗で0.1Wの電力消費となり,このくらいの明るさで点灯します.もう少し明るさが欲しいので,100kΩの抵抗を2本並列にして電流を2倍,消費電力も0.2Wとして加工.本当はもう少し明るいほうがいい,0.5W分くらい.絶縁性と耐熱を考慮して,エポキシ系の樹脂で固定してみました.ちょっと危険です.作ってみたかっただけです.真似しないほうがいいです.買った方が無難です↓省エネ省電力■環境・家計にもやさしいLED★ナツメ球(豆電球)E12規格■イエロー[1点販売]
2011.07.11
コメント(0)
-

100円ショップの0.5WLED電球.
ナツメ球が切れたので,100円ショップで0.5WLED電球を買ってきた.ナツメ球が5Wなので,なんと90%省エネ.でも,付けたとたんチラチラしだしたので,壊れるのは時間の問題か.壊れたら分解してみよう・・・早く壊れないかな.普通に買うならこれ↓省エネ省電力■環境・家計にもやさしいLED★ナツメ球(豆電球)E12規格■イエロー[1点販売]
2011.07.02
コメント(0)
-
ロボトレースの製作その10,ソフト難しい・・・
作ってみると難しさが分かってきました.モータの制御がまだまだ安定しません.
2011.07.01
コメント(2)
全9件 (9件中 1-9件目)
1
-
-

- 大好き!デジカメ!
- 新しいコンパクトデジカメ買いました
- (2026-03-20 07:03:08)
-
-
-

- 新製品発売情報・予約情報
- 5/16発売!6枚2980円で予約できると…
- (2026-05-08 12:04:39)
-
-
-

- 【楽天市場】☆☆楽天おかいどくお買い…
- 【P10倍】おうちで極上ヘッドスパ。u…
- (2026-05-12 19:42:04)
-



