

2011年10月の記事
全16件 (16件中 1-16件目)
1
-
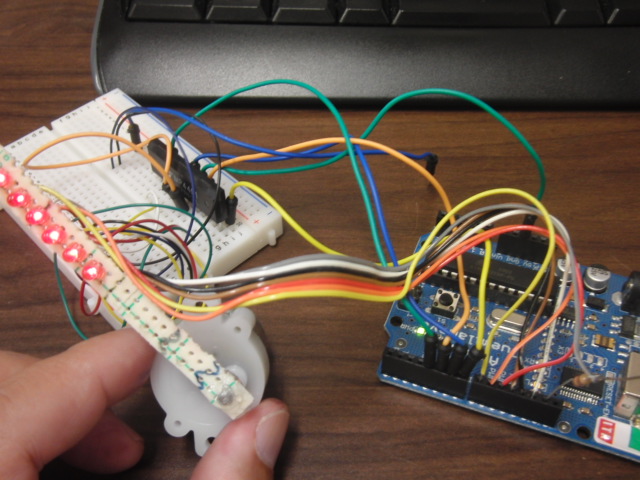
LEDを振り回して何か表示する実験
結論からいうと結果はいまひとつ.高速に往復する棒にLEDがついてて時間を表示する時計を見たことがあったので,簡単にできないかと思ってちょっと実験.こんな感じで・・・長細くLEDを6個並べてアノードをArduinoのデジタル8-13ピンに接続.カソードコモンで1kΩの抵抗をはさんでGNDに接続.(デジタル8-13ピンはPB0-PB5)秋月さんの安いステッピングモータをFETドライバ,MP4401を介してでデジタル4-7ピン(PD4-PD7)に接続して回す.スケッチは簡単にこれだけ.const byte MOTOR[]={0x30, 0x60, 0xC0, 0x90, 0x00}; // モータはPORTDへ出力volatile byte mode=1; // モータの加減速・正逆転のモード volatile byte pat=0; // モータの励磁パターンの位相 volatile int cnt=0; // モータの回転数カウント void setup(){ DDRB |=B00111111; // PB0-5 LED出力 DDRD |=B11110000; // PD4-7 モータ}void loop(){ if (cnt>300) mode=2; if (cnt 0) pat--; else pat = 3; } PORTD &=0x0f; PORTD |= MOTOR[pat]; //モータへパターンの出力 PORTB &=0xc0; PORTB |= (cnt-100)/2; // LEDへパターンの出力}結果は,シャッタースピードを落として写真を撮るとこんな感じ.暗いところではまあまあなのですが,明るいところで見ると往復が遅くて残像が残りません.動画で見るとこんな感じ.もう少し棒を長くして,ぎりぎりまで速度を上げるとましになるかもしれません.
2011.10.31
コメント(0)
-

マイクロマウス九州地区大会の結果
こちらに結果一覧があります↓https://sites.google.com/site/mousekyushu/自分のは,ハーフがゴール直前まで行って壁に引っかかりリタイヤ.クラッシックは,最初から安全策で無事完走,無難なパラメータの最短も成功して,調子に乗ってちょっと速いパラメータを試すもことごとく失敗.結果は3位.優勝,準優勝の方々がシード権を辞退され,順送りでシード権を頂きました.
2011.10.31
コメント(0)
-
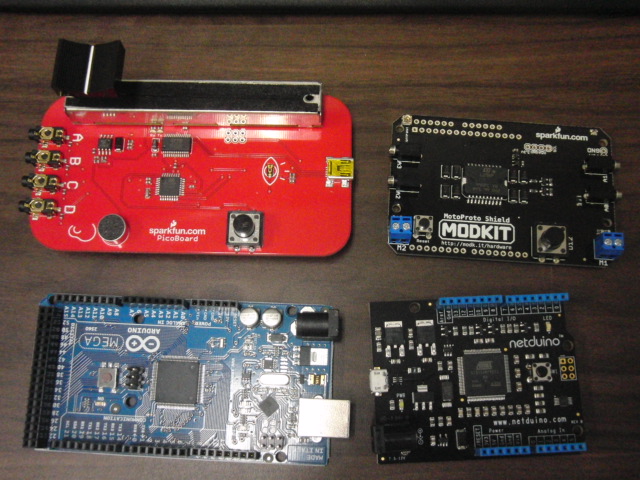
ボードをいろいろお買い物
いろいろ買いました.低学年の教材に使えないかと思って,PicoBoardとMODKIT.どんなものかと思って,netduino.多チャンネルと通信が必要になったので,ArduinoMEGA.明日からマイクロマウス九州地区大会&準備なので,それが終わったらまたレポートします.
2011.10.27
コメント(0)
-
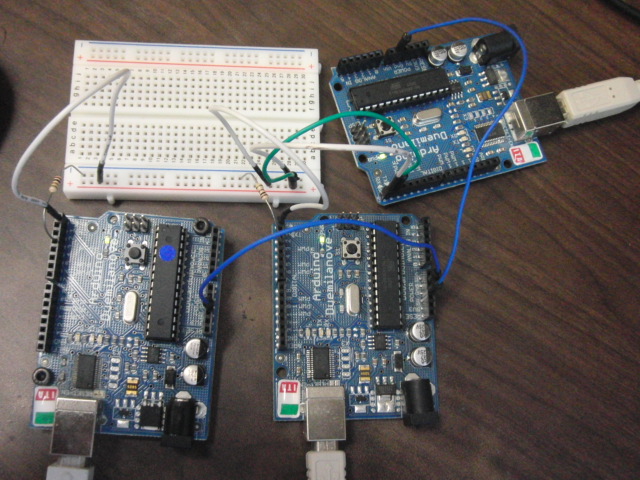
Arduinoで1対多のシリアル通信
1対多のシリアル通信をやってみました.Arduino Duemilanove(UNO)はI2C通信が使えるのですが,この場合アナログ4,5ピンが使用されるので,アナログを6ポートとも使いたい場合には使えません.(あと,I2Cは長距離伝送にも向かないらしいので)それでシリアル通信を使って1対多の通信をやってみました.その様子↓手書きメモホストはハードウェアシリアルを使う.ターゲットはハードウェアシリアルの受信と,ソフトウェアシリアルの送信を使う.ホスト側のTXをターゲットのRXに並列接続.ターゲットのTX(ソフトウェアシリアルでデジタル3ピン)は100Ωの抵抗を介してホストのRXに並列接続.ホストからの送信は,ターゲットが並列に受信.ターゲットは自分が呼ばれたら応答をソフトウェアシリアルで返す.ターゲットのソフトウェアシリアルのTXは,通常はピンモードを強制的にINPUTにしてハイインピーダンス状態.送信時だけピンモードをOUTPUTにして送信.送信後にピンモードをINPUTに戻して,ターゲットデバイスの並列なTXとの干渉を防ぐ.※このモード切替がハードウェアシリアルではできなかったのでターゲットからの送信にはソフトウェアシリアルを使った.プログラムはフリーページにあります
2011.10.26
コメント(0)
-
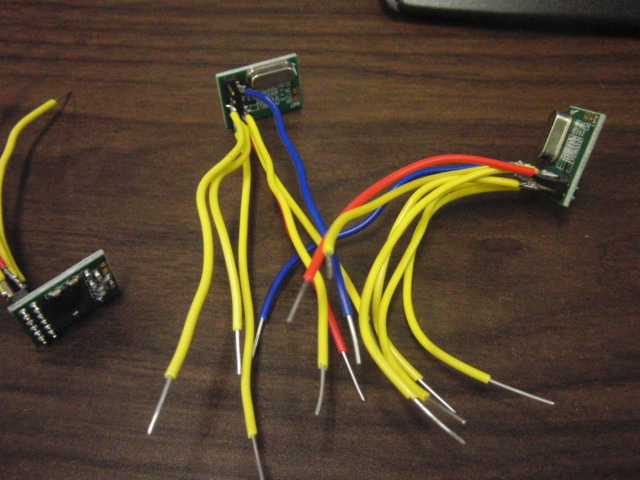
微弱無線モジュールのテスト
購入した微弱無線モジュール(RFM12B)のテストここから購入↓http://csun.co.jp/SHOP/447488/list2.htmlネットでArduinoのライブラリを探すとあった.http://jeelabs.org/2009/02/10/rfm12b-library-for-arduino/ここからリンクをたどってライブラリインストール.サンプルからRF12demoをコンパイルしてArduinoにダウンロード.こんな風に線材をはんだ付け(線がちょっと太すぎ.ポキッと折れそう)↓Arduinoに接続.シリアル通信アプリを2つ起動してそれぞれを接続.それぞれのIDを設定してもう一方にデータを送ってみる.微弱無線を介してデータ通信を確認.でも,デモのプログラムが長くてよく読む気になれない...-追記-こちらのサイトからリンクが張ってある・・・http://csun.co.jp/SHOP/200712022.htmlこの説明書の中のサンプルプログラムをArduino用に書き直しました.http://www.dragonwake.com/download/RF/RF12B_code.pdfシンプルなので分かりやすいです.(公開するわけにはいかないので,もし欲しい人がいたら連絡ください)transmitterから送信したデータをReceiverで受信して,チェックサムが合えばLEDをチカチカさせるだけのプログラムですが,自分の必要な用途には十分なので,これを利用して次の工作が作れます.-さらに追記-多チャンネルで使用できるか確認.送信2個,受信1個で,複数の送信元からのデータを1箇所で受信できるかのテスト.信号が重ならない限りは上手くいきそう.-さらに追記-電流測定をした.送信側:待機電流0.5mA,送信時,アナログメータで10mA弱まで振れるが一瞬なので実際はもっとでてるかも.デジタルテスターでは測れなかった.受信側:受信待機状態で13mA.待機してないといけないのでこれが定常だと考えていい.
2011.10.21
コメント(0)
-

光ファイバユニット購入で失敗&そのリカバリ
ロボトレース用のゲートに設置する光ファイバユニットを購入しました.90度横に光が出るタイプ.早速,ゲートに取り付けてみました.しかし,センサが反応しません.どうやら検出距離が足りないようで選定ミス.返品もできないし約2万円の損失か・・・レンズ付きじゃないとダメなようなので,手元にあったレンズを入れて光軸を調整してみると,センサばびんびん受かります.焦点距離が短くて小さなレンズが手に入ればなんとかなりそう...といっても都合よくそんなレンズが手に入るかあれこれ考えていたらピピッとひらめいた.先日LEDの光を拡散させるために先端を切ったのを思い出し,その逆を試してみます.LEDの先端をカット↓歯磨き粉で研磨.ファイバセンサの発光部分に置くと,センサがビンビン反応してます.レンズが少し斜めに切れてるお陰で回すと光軸調整も容易.すごいぞ俺.もう一つも作ってホットメルトで固定し,時間計測動作の確認.大成功!その動画
2011.10.21
コメント(0)
-

またペンキ塗り
昨日もペンキ塗りしました.ゲートは白です.
2011.10.21
コメント(0)
-

ペンキ塗り
コンパネに水性つや消し黒のペンキ塗り.下地がつるつるすぎて一度塗りではむらが酷かったので,むらむらでも薄く塗った後,2度塗りすることにしました.1度塗り後↓2度塗り後(乾く途中)↓乾いたところはまあまあなのですが,乾く途中で塗りむらがはっきり見えます.安いスポンジ刷毛をつかったせいもあるでしょうが,それにしても下手ですね.-追記-乾いてみたら,大会のコースとはかなり違う質感.つるつるします.買出しに行ったホームセンターにつや消し黒は1種類しかなく,選択の余地はなかったのですがほかの店も回ったほうが良かったのかなぁ・・・でもルールでは,”木材に黒のつや消し塗料が塗布”,”路面のグリップに関する申し出は受け付けられない。”とあるので当面はこれでよしとします.
2011.10.19
コメント(0)
-

8x10LED電光掲示板
秋月の8x8LEDマトリクスが品切れになってしまったので,赤色LEDを並べて電光掲示板を設計しました.せっかくなので8x10で横長に.はんだ付けは大変そう・・・
2011.10.18
コメント(0)
-

ゲート
今日は木工.ホームセンターに買い物に行き,適当な寸法の木材を購入.途中経過.ちょっとちゃっちいけど自作のゲート.後は色塗りと光ファイバセンサを設置すれば完成.ちなみに,中部地区大会ではこのようなゲートが使われています.スタッフ不足で今年はロボトレース競技は開催できませんが,競技者とスタッフを増やすためにはまずは見てもらう機会を作らないと,と思ってコツコツとロボトレースの準備中です.
2011.10.18
コメント(0)
-
ModkitとPicoBoard
ブックマーク.学科長から低学年でも簡単にプログラミングできるのない?って聞かれてScratchがありますよ.って見せたけど,ハードが動かせるのは,って言われて...今度買って試してみます↓Modkithttp://www.modk.it/ボードはスイッチサイエンスさんから購入できます.http://www.switch-science.com/products/detail.php?product_id=499Scratchで動かせるPicoBoard http://www.switch-science.com/products/detail.php?product_id=614
2011.10.17
コメント(0)
-

計算尺
片づけをしていたら見つけました.もらいもので自分で使ったことはありません.何かの試験で計算尺持込可ってあったと思って検索してみたら,第1級陸上無線技術士の試験が最近まで持込可だったとのこと.今でもこんなものは売ってあるんですね↓【ご利用実績5人】BROOKIANA(ブルッキアーナ)回転計算尺べぜル付きクロノ・RD<BR>BA1636RD
2011.10.13
コメント(0)
-
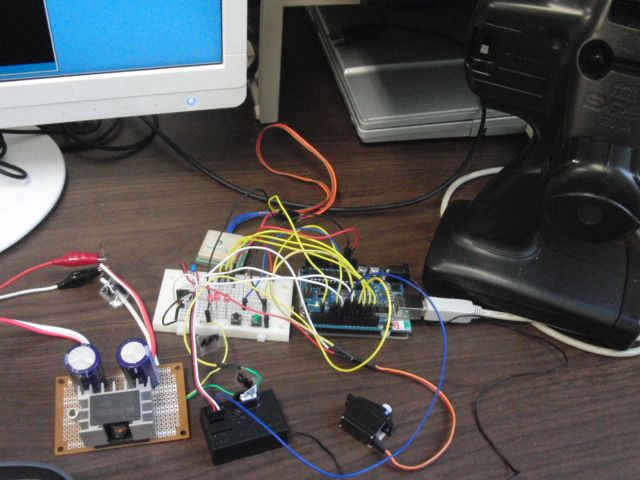
クルーレスソーラーボートのハードウェアテスト
ソフトの大枠も出来て,ハードと接続して動作確認.GPSの受信をしながら自動航行のためにサーボとモータを制御.R/Cで強制割込み操縦.Bluetoothを使ったシリアル通信でコマンド動作.あとはユニバーサル基板に組んで,ボートに乗せてプログラムの調整.できたら実地試験.江津湖か有明海へGo!
2011.10.12
コメント(0)
-

九州プログラミング研究会 第31回定例研究会に行って来ました
プログラミング研究会といっても,ハードがらみの発表が多い研究会です.http://www.kick4.net/wiki/index.php?tkk1110展示物はこんな感じ↓基板も数枚購入してきました.Kumaduino基板の詳細はこちら↓http://www.narimatsu.net/nari_page/cgi/kumaduino.html
2011.10.12
コメント(0)
-
クルーレスソーラーボートのソフト作成中
製作が間に合わなくてクルーレスソーラーボート大会にはエントリーできませんでしたが,大会に関わらず製作は継続,ソフト作成中.途中だけどメモ.ソフトウェアシリアルでGPSを受信する.ハードウェアシリアルでBluetoothを使ってコマンド操作する.ソフトウェアシリアルでGPSの文字列を待つ.受信待ちで処理が拘束される.GPSは1秒おきに数行のデータが出力されるので,1秒の数分の1以上は拘束されない.1行ごとに拘束から抜けて処理できる.数行中の必要な行”GPRMC"が受信されたときに,必要なデータを抜き出して航行制御.結果,1秒毎に航行制御されることになる.それ以外の行では処理を重たくしないようにしないと誤動作.RCにより強制操縦できるように,RCをモニタ.RC信号のモニタをpulseInを使って行うと処理が拘束されるので,RC信号モニタはPICにまかす.PICがRC操縦の有無を1ビットのHI,LOWで出力するので,これをArduinoで受けて,航行制御,RC受信を切替える.ハードウェアシリアルによるBT通信はソフトウェアシリアルに1秒の数分の1待たされる(1秒に数行なので)が,BTによるコマンド受信はバッファ内に収まる文字数で送っておくと,拘束を抜けてから受信処理される.航行中は,GPSによる航行制御またはRC操縦,BT通信,を繰り返す.こんな感じ.
2011.10.06
コメント(0)
-

ダイハツ ミライース納車 & カーステレオ取り付け
一番安いグレードでいろいろ削って買いました.なので,カーステレオもお古を自分で取り付け.外部入力端子を裏から出してるので,音楽プレーヤも直結できます.-追記-燃費について,昨日,今日と通勤(12kmを25分前後)で乗りました.昨日は混んでいて18km/l,今日は流れが良くて21km/lでした.流れ具合で違いますが20km/l前後です.もう少し長距離乗れば燃費は更に向上がると思います.
2011.10.04
コメント(8)
全16件 (16件中 1-16件目)
1
-
-

- 家電よもやま
- 実売37千円の19型テレビを、シャ…
- (2026-05-06 05:40:26)
-
-
-

- iPad
- ipad表示の不具合、CoPilotに聞く。
- (2026-04-12 00:07:57)
-
-
-

- 私のPC生活
- copilotキーを右側ctrlに戻す つい…
- (2026-05-05 22:11:04)
-



