

2011年08月の記事
全13件 (13件中 1-13件目)
1
-

ブックマーク
【送料無料選択可!】30分でつくれるAndroidアプリ Google App Inventorではじめよう! (単行本・ムック) / 塚田翔也/著
2011.08.31
コメント(0)
-

これ欲しい
AR Drone (エイアール・ドローン) PF720002京商【ロボット王国11周年記念セール】
2011.08.31
コメント(0)
-

ピンポン玉オブジェ
今日もちょっと電子工作.適当な時間間隔でサーボで傾きを与えてやると,ピンポン玉が同期して回り続けます.ピンポン玉オブジェの動画
2011.08.23
コメント(0)
-

レーザーカットできる素材
ダイソーで仕入れてきました.10mm厚のカラーボードは面白いように切れます.6mmMDFは下に切れるより焦げて横に燃え広がる方が大きく,購入したレーザー加工機ではまともに切れませんでした.
2011.08.23
コメント(0)
-
マウス進捗
自分メモです.光センサの読みが安定しなかったのですが,調べたら原因が分かりました.光センサの光源のパルス点灯用キャパシタの容量が小さくて,点灯後の電圧の回復が完全でなかった状態で使っていて,光センサのタイマーとモータ制御のタイマーの周期が整数倍で同時に割り込みがかかる時に待ちが入ってタイミングがずれて,光センサの割り込みが遅れて,その間センサの光源が余計に充電されることで,光量が周期的に変わってました.なので,周期を工夫してタイミングのずれが起こらないようにしました.キャパシタの容量が小さいことから時間とともに光量が減っていくことを利用して,前センサの感度を2段階で取ることができました.離れた所から前壁の検出と前壁に近づいた時の平行度調整を別個に行うことにしました.これで全体的にセンサの感度を上げられます.
2011.08.22
コメント(0)
-

マウスに復帰.
ずいぶん触ってなかったですが,マウスに復帰.2年前半?に作った4輪のDCマウスを今年こそはまともに走らせます.ハードに既知の欠陥がありますがソフトで問題を回避します.今でもそれなりのポテンシャルは持ってると思います.ハードの問題は,1)自作片面基板なので重い2)かなり前重心&左右バランス悪い,旋回性も多分ダメ3)センサ回路で前と横が並列回路になっているので独立の感度の調整ができないロボトレースを作ったお陰でDCモータ制御が少し分かってきましたので,それを移植したら動きがよくなりました.エンコーダの設定を変えたのでステップ数や速度設定はやり直し.3)の問題点をソフトで解決するため,センサの計測手順を作り変えてみます.関連していくつか変更が必要ですが,上手くいけば壁の読み間違えもなくなるはずです.
2011.08.19
コメント(0)
-
ロボトレースの製作その16,終了!
センサにオフセットを加えてショートカットをトライしました.コーナーでイン・アウトの走行をさせたり,連続ターンでイン・インの切り返しをさせてみたりしましたが,先読みができないため,オフセットを変化させるタイミングがうまく取れず,かなり不安定な走行になってまったく高速化が見込めませんでした.これ以上は労力の割りに得るものが少なそうなので一旦終了します.-追記-フリーページにまとめを作りました.ロボトレーステストコース製作前準備本体の製作ソフトウェア
2011.08.17
コメント(0)
-
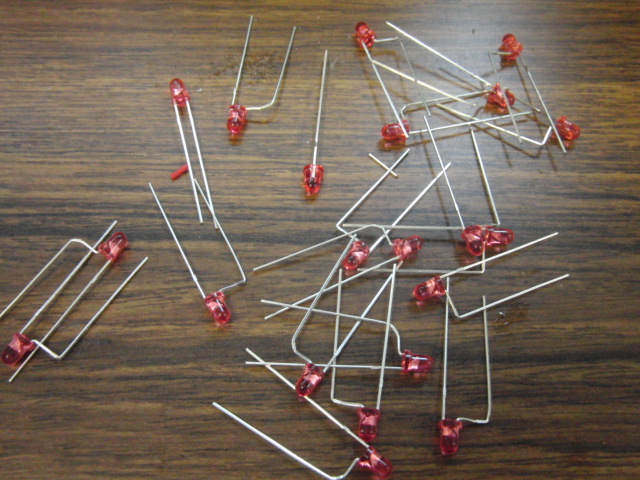
LED Cube (3x3x3)
ちょっと行き詰ってきたので気分転換に作ってみました.製作時間3時間でできました.27個のLEDのアノードをこんな風に曲げます.2cm間隔で並べてカソードをはんだ付け.3段重ねて,アノードをはんだ付け.Arduino書き込み済みATmega328Pで駆動.ディスプレイ用にAcアダプタから電源供給.その動画.参考URLhttps://sites.google.com/a/galileoseven.com/galileo-7/home/led-cube
2011.08.16
コメント(2)
-

レーザー加工機
レーザー加工機を買いました.ベニヤにサンプルの絵が描けて動作確認.さて何作ろう?
2011.08.12
コメント(0)
-
ロボトレースの製作その15,センサにオフセットを加える
センサは端から端までを使ってラインの位置を-35から35までの数値で返すように作っています.なのでセンサ値にオフセットを加えると,その分ラインからずれた位置をトレースして走るようになります.0.5秒毎に-10と10のオフセットを与えて走らせてみましたー> その動画1回目の走行履歴をもとに適当なオフセットを滑らかに与えてやれば,いいライン取りで走らせることができるんじゃないかと考えていますが,オフセットをどのように算出するかが問題ですね.-追記-アウト・イン・アウトは歩数がきっちり取れるか,先読みができないと無理っぽいので,イン・アウトでのコーナリングを考えてみます.-追記2-センサにオフセットを加えてコーナリングするプログラムを作ってみましたが,1回目走行の歩数をもとにオフセットをなだらかに変化させようとしても,実際のラインとの整合性(ライン取りが違うと当然歩数も変わる)と同期が悪く(ターンの切り返しとか),スムーズな走行ができずにふらふらしてしまいます.やっぱり先読みセンサがないと無理かなぁ...
2011.08.09
コメント(0)
-
ロボトレースの製作その14,2回目で加減速
1回目でコースログを取り,2回目でログをもとに直線で加減速する走行ができました.ターンと直線の2段階の速度でライントレースはP制御のみでそれなりに走りだしました.IとD制御を入れれば更に高速化できそうですが,高速化より次はセンサ全域を使ってラインを滑らかにトレースする構造を作ってみます.ターンをアウトインアウトで走るのが次の目標.ロボトレーサー,2回目走行で直線を加速する動画-追記-もうちょっと早くなったので動画入替え.
2011.08.08
コメント(0)
-
麻生工科自動車大学校のページ
ブックマーク.http://www.asojuku.ac.jp/acet/school/project/index.html第20回マイクロマウス九州地区大会にご参加頂いた記事が掲載されていました.
2011.08.05
コメント(1)
-

秋月さんの8x8LEDマトリクス品切れのため・・・
LED電光掲示板と称して秋月電子の8x8LEDマトリクスを使った電子工作を公開講座などでやっていたのですが,LEDマトリクスがついに品切れだそうです.あちこち探しましたが同等品の入手が難しく,はんだ付けが大変ですがLEDを64個で同じものを設計中↓
2011.08.02
コメント(0)
全13件 (13件中 1-13件目)
1
-
-

- パソコンニュース&情報
- 【Raspberry Pi 4 Model B セットア…
- (2026-05-05 20:34:24)
-
-
-

- 大好き!デジカメ!
- 新しいコンパクトデジカメ買いました
- (2026-03-20 07:03:08)
-
-
-

- 家電よもやま
- 実売37千円の19型テレビを、シャ…
- (2026-05-06 05:40:26)
-



