
全221件 (221件中 1-50件目)
-
AliExpressから購入した2TB NGFF M.2 SSDがへん(その2)
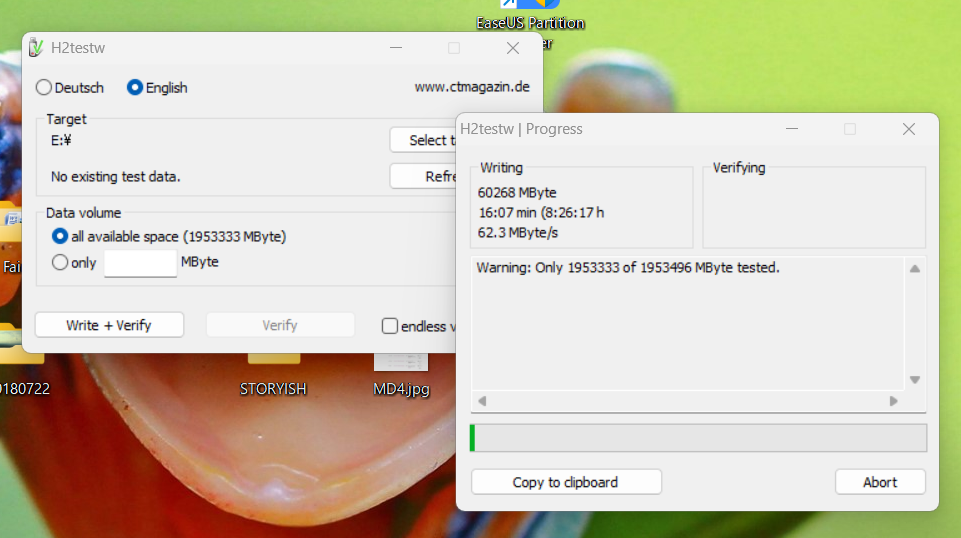
初期状態に復旧し、一旦は正常に戻ったと思っていた2TBのNGFF M.2 SSDですが、再度2TBのsATAのHDDからのミラーリングを行ったところ、エラーが表示され同じ不具合が再現されました。もう1回、前回投稿時に紹介した手順に従い、初期状態まで復旧させました。NANDのFLASHメモリのどこかのクラスタに書き込めない場所があるかを確認するため、書き込みと読み取りをテストしてくれるソフトウェアであるH2testwを試してみました。起動後、Englishを選択し、該当するドライブを指定し、All avairable spaceを選択し、Write+Verifyボタンを押すとドライブのチェックが始まります。YouTube動画は画面キャプチャを50倍速で再生しています。94.684GBのWriteでデバイスの準備が出来ていませんと表示されます。このSSDは100GB近くWriteされるあたりのNAND FLASHのメモリ番地に不良がありそうです。今度は、NAND FLASHの状況を確認するため、REALTEKのコントローラーに対応したrtl_flash_id を用いて、回路内部の情報を探りました。NAND FLASHメモリは、Micron 176Lと表示されています。驚くことに、NAND FLASHメモリのサイズがへんなのです。1バンクあたり、64GBのものが2バンクで128GBしかありません。約95GBの書き込みで動作が異常になる理由もこれで説明がつきます。AliExpressの15日間保証の時期を過ぎており、システム上の異議申し立ては期限切れになっていて、セラーに連絡し、NAND FLASHメモリサイズを誤って搭載した不良品であるので交換する様に求めましたがセラーは全く交換には応じてくれそうにありません。15日を過ぎていても90日Buyers Protectionがまだ有効と考え、セラーではなく、AliExpressの本部にこの事実をチャットで連絡したところ、証拠となる写真を送付してくれとのこととなり、上記のrtl_flash_idの画面キャプチャを提出したところ、容量を誤って製造された不良品であることを認めてくれました。返品交換を求めていたのですが、受け入れられず、全額ではないものの約6割ほどが返金されることになりました。AliExpressの90日Buyers Protectionですが、15日の異議申し立て期間を過ぎていてもセラーではなくAliExpressの本部が対応してくれるので、同様な経験をされた方はあきらめずに、AliExpressの本部に連絡してください。90日以内なら、何らかの対応をとってくれそうです。さて、手元に残ったSSDの使い道はあるのか?(続く)
2023.01.21
コメント(3)
-

AliExpressから購入した2TB NGFF M.2 SSDがへん(その1)
Win11対応のために、自作PCをアップデートした際にAliexpressから2TBのNGFF M.2 SSDを購入しました。このSSDがうまく動かず結構苦労したので、情報公開すべきと思い投稿しました。メーカーは、DELAIHE ELECTRONICSと書かれています。取り付けた当初は、パーティション、ボリュームともに作成され、何事もなく動作している様に見えていました。メインのディスクにしようと思い、2TBのsATAのHDDのミラーリング作業を行ったところ、エラーが表示され、以降、このSSDが利用できなくなってしまいました。2TBのHDDのミラーリング中にディスクの属性や、パーティションテーブルを壊してしまい、Win11のディスクの管理画面で、ディスクの初期化さえできない状況に陥った様です。そこで考えたのが、このSSDのコントローラチップにアクセスしてFirmwareのアップデートやNANDメモリのリセットを行うことです。まず、どこのコントローラーチップが使用されているか調べるために、ラベルをはがしてみました。型番は消去されているもののRayMXとかREALTEKの文字が読み取れます。NAND FLASHメモリは2つあり、型番の29FSRHB2ALCTM4を調べてみましたが、ヒットしませんでした。ロゴはMicron/Intelそっくりなのですが、違うみたいです。これらの情報をもとに、このSSDのコントローラを制御するソフトウェアを探ったところ、REAKTEKのコントローラを使った製品は数少なく、部品構成が近そうなのが、ADATA社のSU630であることが判りました。ADATA社はディスクのFirmwareのアップデートなどコントロールチップを制御するソフトウェアのSSD ToolBoxを無償提供してくれていて、これが利用できそうです。では。壊してしまったディスクをもとの状態に戻していきます。この時点で、このSSDは、電源ランプとディスクアクセスランプの2つのLEDがつきっぱなしとなり、あげくのはて、Windowsのディスクの管理のアプリにさえ認識されない状態にまで至りました。あまり良い方法とは言えないのですが、NGFF M.2⇔USB変換アダプタを別途購入し、USBコネクタの抜き刺しを数十回激しく行ったり、Win11のデバイスマネージャーでこのSSDのディスクドライブのプロパティでデバイスの無効・有効を数十回行った結果、とりあえず、Win11のディスクの管理にこのSSDが認識される状態にまで復旧できました。続いて、Win11の機能であるDISKPARTコマンドでディスクのREADONLY属性を確認してREADONLYになっていれば、属性を修正します。検索バーからcommandと打ち込んで、コマンドプロンプトを管理者権限で実行します。コマンドプロンプトから。diskpartと打ち込みENTER、list disk と入力すると、Diskの一覧が表示されますので、該当するdisk番号を控えておきます。select disk (番号)ENTER、attributes disk clear readonlyと入力すれば、readonly属性は解除されます。このSSDでは、これまでの操作によるデータ破壊への保護機能が働いたのか、なぜかreadonlyに属性が変わってしまっていた様です。続いて、NAND FLASHメモリを初期化しましす。先に紹介した、REALTEKのコントローラをサポートしている、SSD ToolBoxをダウンロードしインストールします。ADATAのSSDにはREALTEKのコントローラーを搭載している機種もあることから、このソフトならコントローラーチップにアクセスし操作できるだろうとやってみたのがビンゴでした。ユーティティーメニューの中に、セキュアイレースの項目ふがあり、これを実行します。1回目はフリーズ、USBアダプタを抜き刺しし、次は10%まででフリーズ、3’回目でようやく、100%まで消去を進めることができました。この段階で、SSD ToolBox上ではSSD2TBのディスクが正常、温度も表示されました。Win11のディスクの管理を開くと、ディスク1の初期化が’求められ、正常に終了。ボリュームも問題なく作成されます。これでいったんは、購入時の状況まで復旧できた様です。ディスク1として1907.01GBのボリュームが正常と表示されています。これで解決かと思っていたのです、再度2TBのsATAのHDDからのミラーリングを行ったところ、同様のトラブルが再現されました(続く)
2023.01.21
コメント(2)
-
IndieGoGoクラウドファンディングのAir Selfie社AIR PIXは来ず、代わりにAIR NEOへのアップグレードの提案を受けた
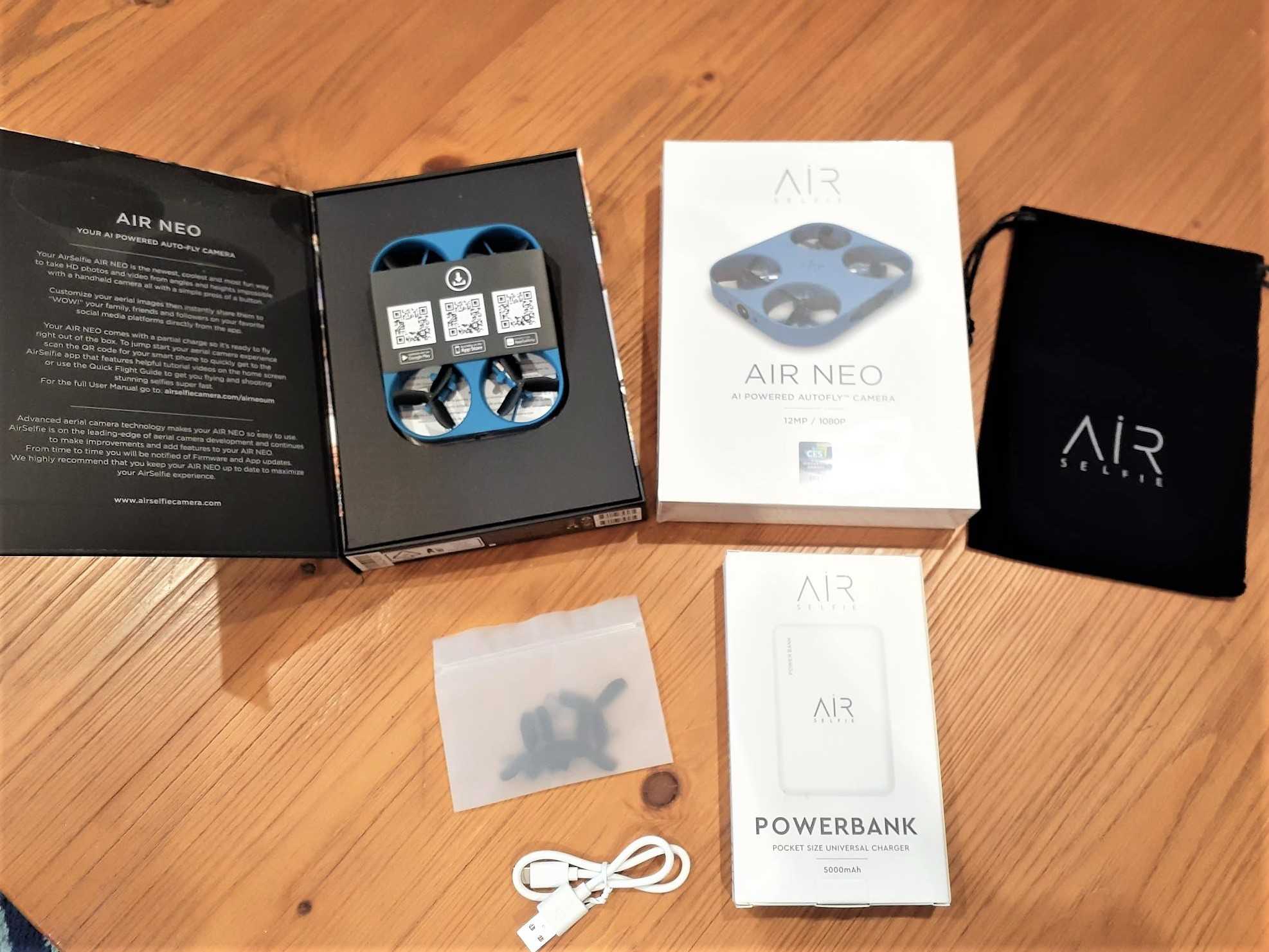
皆さんは、クラウドファンディングされていますか?私は、クラウドファンディングを信じていません、それは、IndieGoGoであまり良い経験をしていないからです。これまでに、IndieGOGOで、2019年にExtreame Fliyers社のMicro Drone 4.0に495ドル、Air Selfie社のAIR PIXに134ドルの支援を行いました。両製品ともに、未だに製品は送付されていません。特に、Micro Drone 4.0は、当時は航空法に抵触しない200g未満の機体だったので、たいへん待ち望んでいたのですが、国内の規制も厳しくなり、もはや、100gを超えるので、要登録の機体となり、魅力がなくなってしまいました。一方でAIR PIXは製品化まで至ったものの、IndieGOGOの支援者を無視して、Amazonなどで販売されていました。このAIR PIXを販売しているAir Selfie社は、クラウドファンディングの支援者から金を集めるだけ集め、支援者には完成品を提供せず、ネット販売を通じて販売している非常に悪質な会社です。引っ越したことから、送付先住所の変更をしようとしましたが、IndieGoGoでは出来なかったので、Air Selfie社に直接メールしたところ、AIR PIXの生産は終了し、在庫もないとのことで、AIR PIXの後継品のAIR NEOにアップグレードする提案を受けました。価格は、支援した金額を差し引いた額くらいで提供するというのです。一度は、騙された会社です。商品が届かないリスクもあるのでPayPalを用いて支払いました。支払いは、10月25日だったのですが、到着は、UPS経由で11月6日でした。AIR PIXは、3年待っても来なかったのに、AIR NEOは2週間もかからず到着したことになります。アップグレードと言っても、AIR PIXで実現されたジェスチャーコントロールとかは廃止され、自動飛行の機能が増えたくらいです。本来は、追加の支払いなしにAIR PIXの代替品としてAIR NEOを提供してほしいところです。写真は、到着した商品ですが、アプリも含め、一部不完全な日本語化がされています。まだ飛行はさせてませんので、画質や自動飛行の性能もまだ判りません。試した後、またブログに掲載したいと思います。
2022.11.06
コメント(0)
-

98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その9:最後)
Arduinoだけでも、プリンタポートのチェックは可能なのですが、Arduinoの電源供給がUSBであることもあり、どのみちUSBで接続するなら、モニタ用のPC側で、状況を確認する方法もあります。Arduinoのプログラム開発環境にはシリアルモニタが付属しています。シリアルモニタを起動すると、STROBEがONになるのを待ち受ける画面が表示されます。98ノート側で、作成したPRNCHK.BATをDOS環境(又はDOS窓)で保存したフォルダにカレントディレクトリを移動してから実行します。(PRNCHK リターン)起動すると0-7、S、B、Qのキー入力待ちが表示されます。入力するキーでの動作は以下のとおりです。・0:bit 0をHighにする(0b00000001をプリンタポートに出力する)・1:bit 1をHighにする(0b00000010をプリンタポートに出力する)・2:bit 2をHighにする(0b00000100をプリンタポートに出力する)・3:bit 3をHighにする(0b00001000をプリンタポートに出力する)・4:bit 4をHighにする(0b00010000をプリンタポートに出力する)・5:bit 5をHighにする(0b00100000をプリンタポートに出力する)・6:bit 6をHighにする(0b01000000をプリンタポートに出力する)・7:bit 7をHighにする(0b10000000をプリンタポートに出力する)・S:STROBE信号のON/OFFをトグルする・B:BUSY信号の状態をモニタする・Q:スクリプトを抜けてDOSプロンプトに戻るここでは0(bit 0)を選択して、0b00000001をプリンタポートのData bitに送信します。Arduinoでプリンタラインの状況がモニタされ、モニタ用PCに結果を表示します。この例では、モニタ用PCにbit0のラインがHIGHになり、0b00000001を受信したことが示されています。途中、98ノートとArduino間のネゴシエーションのためのSTROBE信号やBUSY信号に変化についてもモニタ用PCに表示されます。98側のスクリプトが正常に終了して、次の入力の待ち受けになった場合は、98ノートのプリンタポートのSTROBEとBUSYが正常であることが判ります。98ノート側の画面で、Waiting.....と表示される様な場合は、STROBEまたはBUSYが故障していることになります。DATAラインは8本あるので、bit 0からbit 7まで順にこの作業を繰り返します。これらが、正常動作した場合は、98ノートの単方向データ通信に問題はなく、正常であるという結論になります。98ノートのプリンタポートチェッカー の記事は、以上です。
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その8)
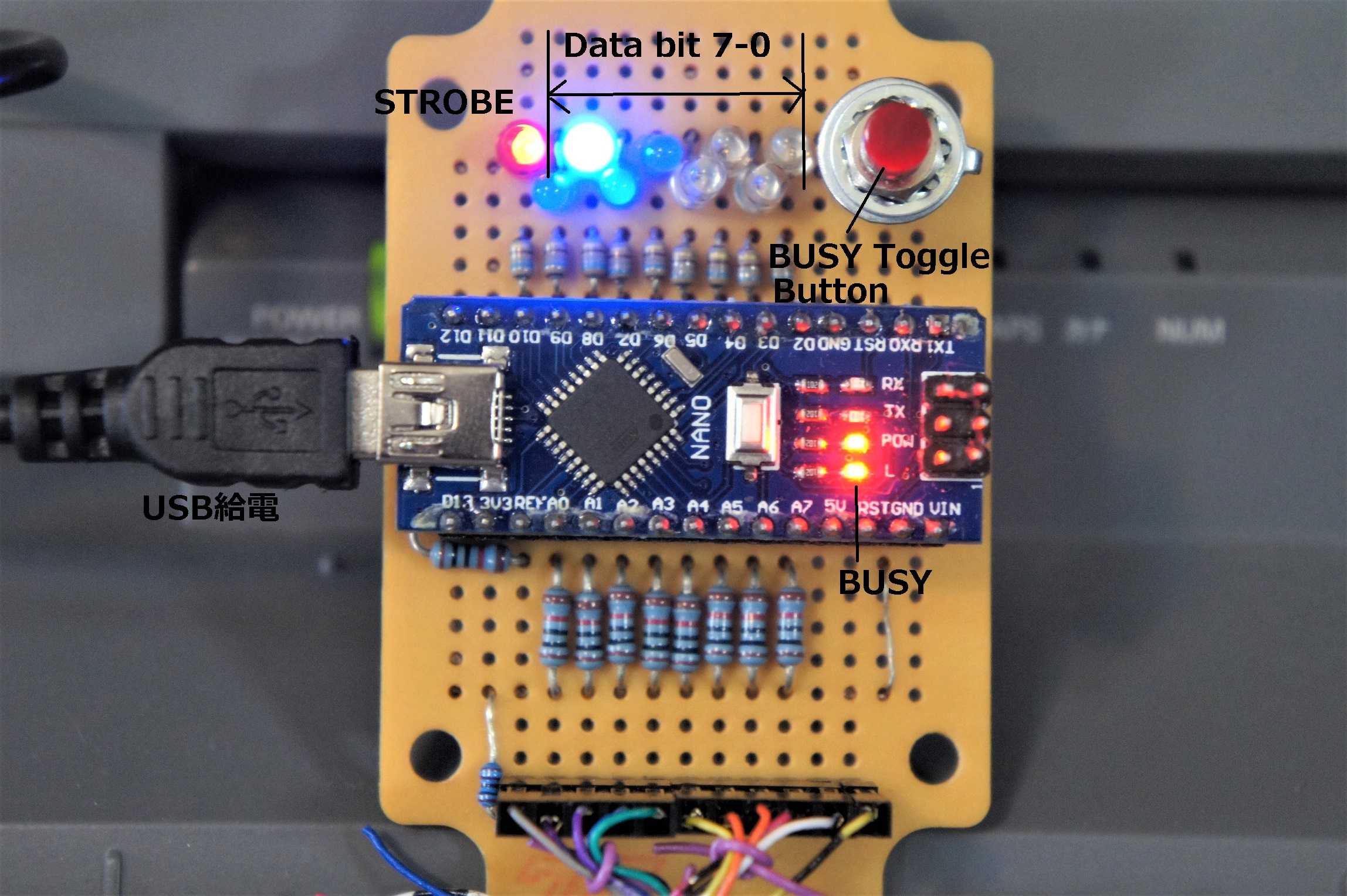
プリンタポートチェッカーの操作の説明をします。単方向通信のみサポートしている9801シリーズのプリンタポートが正常に動作するかの確認は、PC側から周辺機器側に送られる・DATAの8本のライン・STROBEの1本のライン周辺機器側からPC側に送られる・BUSYの1本のラインの合計10本のライン全てが、操作したとおりにHIGHまたは、LOWに移行するかを見ることです。まずは、簡単な方法である、Arduino nanoに結線したLEDを確認する方法です。とは言っても、Arduino nanoの電源供給は、USBポートなので、どのみちPCに接続して作業する場合は、その9を見てください。こちらは、LEDなどの機能を示しています。但しこれは、作成者の配線や部品配置によって異なってきます。私が作成したもののLED配置は写真のとおりです。BUSY信号のみArduinoのオンボードのLEDを使用していて、合計10個のLEDでプリンタのラインの状態を確認することができます。98ノート側で、作成したPRNCHK.BATをDOS環境(又はDOS窓)で保存したフォルダにカレントディレクトリを移動してから実行します。(PRNCHK リターン)起動すると0-7、S、B、Qのキー入力が表示されます。入力するキーでの動作は以下のとおりです。・0:bit 0をHighにする(0b00000001をプリンタポートに出力する)・1:bit 1をHighにする(0b00000010をプリンタポートに出力する)・2:bit 2をHighにする(0b00000100をプリンタポートに出力する)・3:bit 3をHighにする(0b00001000をプリンタポートに出力する)・4:bit 4をHighにする(0b00010000をプリンタポートに出力する)・5:bit 5をHighにする(0b00100000をプリンタポートに出力する)・6:bit 6をHighにする(0b01000000をプリンタポートに出力する)・7:bit 7をHighにする(0b10000000をプリンタポートに出力する)・S:STROBE信号のON/OFFをトグルする・B:BUSY信号の状態をモニタする・Q:スクリプトを抜けてDOSプロンプトに戻るまずは、プリンタポートのデータラインのbit 0をHighにしてみます。0を選択すると、Arduino側のbit 0に相当するLEDが点灯すれば、データラインのbit 0が正常動作していることを確認できます。もしLEDに変化が見られなければ、98ノートのプリンタポートのbit 0が故障していることになります。途中、98ノートとArduino間のネゴシエーションのため、STROBE信号やBUSY信号に変化します。正常に終了して、次の入力の待ち受けになった場合は、98ノートのプリンタポートのSTROBEとBUSYが正常であることが判ります。98の画面で、Waiting.....と表示される様な場合は、STROBEまたはBUSYが故障していることになります。DATAラインは8本あるので、bit 0からbit 7まで順にこの作業を繰り返します。これらが、正常動作した場合は、98ノートの単方向データ通信に問題はなく、正常であるという結論になります。その9では、Arduinoのシリアルモニタを使用する方法を示します。
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その7)
STROBE関連、同期シグナルラインの制御用のサブルーチンのバッチファイルです。STB_ON.BATSTB_OF.BATSTROBE信号を操作するためにDBUG.EXEにリダイレクトするI/Oは、読み取りが44hなのですが、書き込みはコントロールレジスタの46hで、I/Oが異なることに注意を要します。レジスタの値は、先人が情報公開されています。バッチファイルの作成は、ここまでです。作成したバッチファイルは同じフォルダに存在する必要があります。外部DOSコマンドのDEBUG.EXE、FIND.EXE、CHOICE.COMも同じフォルダにおいておくか、PATHが通っているフォルダにある必要があります。その8では、使い方を示します。====================STB_ON.BATの記述(2重破線内をコピーペーストしてください)====================REM STROBEREM **********REM STROBE ONREM **********echo o 46 0E > STROBE.RSPecho i 44 >> STROBE.RSPecho q >> STROBE.RSPdebug < STROBE.RSP >nulecho STROBE ON(0x00) LINE LOW====================STB_OF.BATの記述(2重破線内をコピーペーストしてください)====================REM STROBEREM **********REM STROBE OFFREM **********echo o 46 0F > STROBE.RSPecho i 44 >> STROBE.RSPecho q >> STROBE.RSPdebug < STROBE.RSP > nulecho STROBE OFF(0x80) LINE HIGH====================
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その6)
プリンタBUSY関連のサブルーチンのバッチファイルCHK_BS.BATWT_BS_ON.BATWT_BS_OF.BAT3つの記述を示します。DOS外部コマンドのDEBUG.EXEでプリンタBUSYのレジスタの値をファイルに出力し、そのファイル内にあるレジスタ値をDOS外部コマンドのFIND.EXEを利用してレジスタ値が0x90か0x94であるかの判定を行い、BUSYのステータスを判断しています。その7では、STROBE関連のサブルーチンのバッチファイルを示します。====================CHK_BS.BATの記述(2重破線内をコピーペーストしてください)====================REM ********************REM Check PRN BUSY statusREM ********************echo i 42 > BUSY.RSPecho q >> BUSY.RSPdebug < BUSY.RSP > RSLTBUSY.TXTrem type RSLTBUSY.TXTfind "90" RSLTBUSY.TXT > nulif errorlevel 1 goto NOT_BUSYif errorlevel 0 goto IN_BUSY:IN_BUSYecho BUSY(0x90)goto END_CHK_BS:NOT_BUSYecho NOT BUSY(0x94)goto END_CHK_BS:END_CHK_BS====================WT_BS_ON.BATの記述(2重破線内をコピーペーストしてください)====================REM BUSY LOOPREM **********:BUSYLOOPecho i 42 > BUSY.RSPecho q >> BUSY.RSPdebug < BUSY.RSP > RSLTBUSY.TXTrem type RSLTBUSY.TXTfind "90" RSLTBUSY.TXT > nulif errorlevel 1 goto NOT_BUSYif errorlevel 0 goto IN_BUSY:NOT_BUSYecho LOOP waiting for BUSYpausegoto BUSYLOOP:IN_BUSYecho BUSY====================WT_BS_OF.BATの記述(2重破線内をコピーペーストしてください)====================REM BUSY LOOPREM **********:BUSYLOOPecho i 42 > BUSY.RSPecho q >> BUSY.RSPdebug < BUSY.RSP > RSLTBUSY.TXTrem type RSLTBUSY.TXTfind "90" RSLTBUSY.TXT > nulif errorlevel 1 goto NOT_BUSYif errorlevel 0 goto IN_BUSY:IN_BUSYecho LOOP waiting for NOT BUSYpausegoto BUSYLOOP:NOT_BUSYecho NOT BUSY====================
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その5)
以下にメインとなるバッチファイルの記述を示します。適当なエディタで、テキスト編集し、ファイル名を"PRNCHK.BAT"として保存下さい。このファイルを実行することになります。パイプやリダイレクト外部callなど、MS-DOSのバッチファイルを書くのは結構たいへんでした。日頃は、C言語をメインに使用するのですが、DEBUG.EXEの外部DOSコマンドを利用することで、バッチファイルだけでも、意外にも色々なことが出来ることを初めて知りました。DEBUG.EXEにリダイレクトで渡すパラメーターは、一旦RSPの拡張子のテキストファイルに書き出していますが、40hなど、I/Oに指定している値は、単方向プリンタの設定で、この値を変更すれば9821シリーズやDOS/V機にも対応できます。レジスタの値等の情報は、先人が情報を公開されています。ユーザーの操作は、choice.comとerrorlevel で判定しています。if errorlevel X goto Yの構文は、はまりました。プログラミング言語では、if(errorlevel >=X){goto Y}に相当し、『以上』の判定だとは、全く思いつかず、ここで苦労しました。その6では、サブルーチンとしてコールするバッチファイルを示します。====================@echo offBREAK ONREM ********************REM STROBE OFF (Initialize)REM ********************echo Initialize PRN portcall STB_OF.BATecho o 40 00 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x00(0b00000000)echo Printer Port check script by Rom_OkpauseclsREM ********************REM Waiting operationREM ********************echo Printer Port check script by Rom_Ok:STARTecho ====================echo Enter bit "0-7" to write PRN, "S" to toggle Strobe ON OFF, echo "B" to check PRN BUSY or "Q" to Quitecho ====================choice /C:01234567SBQif errorlevel 11 goto ENDif errorlevel 10 goto CHK_BUSYif errorlevel 9 goto STROBEif errorlevel 8 goto WRI_0x80if errorlevel 7 goto WRI_0x40if errorlevel 6 goto WRI_0x20if errorlevel 5 goto WRI_0x10if errorlevel 4 goto WRI_0x08if errorlevel 3 goto WRI_0x04if errorlevel 2 goto WRI_0x02if errorlevel 1 goto WRI_0x01goto START:WRI_0x01call WT_BS_OF.BATecho o 40 01 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x01(0b00000001)goto NEGO_PRN:WRI_0x02call WT_BS_OF.BATecho o 40 02 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x02(0b00000010)goto NEGO_PRN:WRI_0x04call WT_BS_OF.BATecho o 40 04 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x04(0b00000100)goto NEGO_PRN:WRI_0x08call WT_BS_OF.BATecho o 40 08 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x08(0b00001000)goto NEGO_PRN:WRI_0x10call WT_BS_OF.BATecho o 40 10 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x10(0b00010000)goto NEGO_PRN:WRI_0x20call WT_BS_OF.BATecho o 40 20 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x20(0b00100000)goto NEGO_PRN:WRI_0x40call WT_BS_OF.BATecho o 40 40 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x40(0b01000000)goto NEGO_PRN:WRI_0x80call WT_BS_OF.BATecho o 40 80 > DATA.RSPecho i 40 >> DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > nulecho Write 0x80(0b10000000)goto NEGO_PRNREM ********************REM STROBE ON/OFF toggleREM ********************:STROBEecho i 44 > DATA.RSPecho q >> DATA.RSPdebug < DATA.RSP > RESULT.TXTfind "00" RESULT.TXT > nulif errorlevel 1 goto STROB_ONif errorlevel 0 goto STROB_OF:STROB_ONcall STB_ON.BATgoto START:STROB_OFcall STB_OF.BATgoto STARTREM ********************REM Check PRN BUSY statusREM ********************:CHK_BUSYcall CHK_BS.BATgoto STARTREM ********************REM Negotiation with PRNREM ********************:NEGO_PRNcall STB_ON.BATcall WT_BS_ON.BATcall STB_OF.BATcall CHK_BS.BATgoto START:END
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その4)
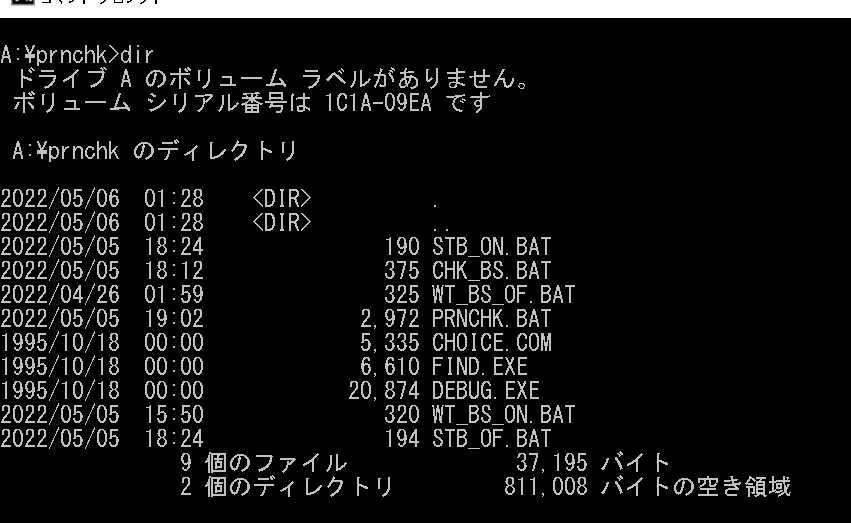
続いて、98ノート側のプリンタ制御用のスクリプトについてです。本来であれば、コンパイラによる実行ファイルを作成したいところですが、PC-98用のコンパイラをもっていないので、DOSのバッチファイルを作成しました。バッチファイルから呼び出すDOSの外部コマンドはDEBUG、CHOICE、FINDで、これらのDOSの実行ファイルはバッチファイルと同じディレクトリにあるかPATHを指定しておく必要があります。このうち、DEBUG.EXEは、MS-DOSでは、プログラム開発ツールのディスク内にありますが、持っていなければ、Win95/98では標準でHDD内にあるはずです。プログラムを書いて実行ファイルを作成しなくとも、このDEBUG.EXEを使用することで、プリンタポートの制御用レジスタにアクセスできます。その方法は、先人が紹介されています。必要なMS-DOSの外部コマンド(EXE)と作成するバッチファイルは以下のとおりです。つぎに、バッチファイルの記述を示しますs。
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その3)
Arduino Nanoに書き込んだスケッチ(プログラム)は以下のとおりです。Arduino Nanoのほぼ全I/Oピンを使用します。A0からA7で8bitのプリンタライン信号を読み取ります。Arduinoアナログ入力ピンは、デジタル入力ピンとして設定して利用します。但しArduino NanoのA6とA7については、デジタル入力ピンとしては利用できず、アナログ入力ピンとしての利用になりますが、analogRead関数でも対応可能です。PC-9801NX/Cのプリンタ信号のHIGHおよび、Arduino NanoのI/OのHIGHの電圧はともに約5Vですので、analogRead関数の返り値で閾値を300で判断するとうまく動作します。また、9801側からデータ送信時の同期のためSTROBE信号は、他のラインとは異なり、ビット反転しています。STROBE ONではLOW、STROBE OFFではHIGHとなります。Arduino NanoのD13は、Arduino NanoのオンボードLEDに接続されていますが、I/OPinの数が足りなくなることから、BUSY信号の出力と内蔵LEDをモニタとして兼用しています。通信手順の処理については、少々難解かもしれません。詳しくは、以下のスケッチ(プログラム)を読み解いてみてくださいもし、Bugがあれば教えてください。#define LED_PRN_Data_Bit_0 2#define LED_PRN_Data_Bit_1 3#define LED_PRN_Data_Bit_2 4#define LED_PRN_Data_Bit_3 5#define LED_PRN_Data_Bit_4 6#define LED_PRN_Data_Bit_5 7#define LED_PRN_Data_Bit_6 8#define LED_PRN_Data_Bit_7 9#define LED_PRN_Strobe 10#define BTN_Busy_Toggle 11#define IN_PRN_Strobe 12#define OUT_and_LED_PRN_Busy LED_BUILTIN //13と同じ定義#define IN_PRN_Data_Bit_0 A0#define IN_PRN_Data_Bit_1 A1#define IN_PRN_Data_Bit_2 A2#define IN_PRN_Data_Bit_3 A3#define IN_PRN_Data_Bit_4 A4#define IN_PRN_Data_Bit_5 A5#define IN_PRN_Data_Bit_6 A6#define IN_PRN_Data_Bit_7 A7unsigned char Bit_Data = 0b00000000;unsigned char Bit_Data_Back = 0b00000000;boolean Status_BUSY = false;boolean Status_STROBE = false;char sendPacket[24] = "";int Status_Flag = 0;// the setup function runs once when you press reset or power the boardvoid setup(){ // initialize serial communication at 9600 bits per second: Serial.begin(9600); pinMode(LED_PRN_Data_Bit_0, OUTPUT); pinMode(LED_PRN_Data_Bit_1, OUTPUT); pinMode(LED_PRN_Data_Bit_2, OUTPUT); pinMode(LED_PRN_Data_Bit_3, OUTPUT); pinMode(LED_PRN_Data_Bit_4, OUTPUT); pinMode(LED_PRN_Data_Bit_5, OUTPUT); pinMode(LED_PRN_Data_Bit_6, OUTPUT); pinMode(LED_PRN_Data_Bit_7, OUTPUT); pinMode(LED_PRN_Strobe, OUTPUT); pinMode(BTN_Busy_Toggle, INPUT_PULLUP); pinMode(IN_PRN_Strobe, INPUT_PULLUP); pinMode(OUT_and_LED_PRN_Busy, OUTPUT); pinMode(IN_PRN_Data_Bit_0, INPUT_PULLUP); pinMode(IN_PRN_Data_Bit_1, INPUT_PULLUP); pinMode(IN_PRN_Data_Bit_2, INPUT_PULLUP); pinMode(IN_PRN_Data_Bit_3, INPUT_PULLUP); pinMode(IN_PRN_Data_Bit_4, INPUT_PULLUP); pinMode(IN_PRN_Data_Bit_5, INPUT_PULLUP);// pinMode(IN_PRN_Data_Bit_6, INPUT_PULLUP);//Arduino Nanoは、A6とA7がアナログ入力専用// pinMode(IN_PRN_Data_Bit_7, INPUT_PULLUP);//Arduino Nanoは、A6とA7がアナログ入力専用}// the loop function runs over and over again forevervoid loop() {//================================================ //Printer Data bit(0-9), Strobeのステータスの読み込み及びLED出力 //================================================ if (digitalRead(IN_PRN_Data_Bit_0)) { Bit_Data = Bit_Data | 0b00000001; digitalWrite(LED_PRN_Data_Bit_0, HIGH); } else { Bit_Data = Bit_Data & 0b11111110; digitalWrite(LED_PRN_Data_Bit_0, LOW); } if (digitalRead(IN_PRN_Data_Bit_1)) { Bit_Data = Bit_Data | 0b00000010; digitalWrite(LED_PRN_Data_Bit_1, HIGH); } else { Bit_Data = Bit_Data & 0b11111101; digitalWrite(LED_PRN_Data_Bit_1, LOW); } if (digitalRead(IN_PRN_Data_Bit_2)) { Bit_Data = Bit_Data | 0b00000100; digitalWrite(LED_PRN_Data_Bit_2, HIGH); } else { Bit_Data = Bit_Data & 0b11111011; digitalWrite(LED_PRN_Data_Bit_2, LOW); } if (digitalRead(IN_PRN_Data_Bit_3)) { Bit_Data = Bit_Data | 0b00001000; digitalWrite(LED_PRN_Data_Bit_3, HIGH); } else { Bit_Data = Bit_Data & 0b11110111; digitalWrite(LED_PRN_Data_Bit_3, LOW); } if (digitalRead(IN_PRN_Data_Bit_4)) { Bit_Data = Bit_Data | 0b00010000; digitalWrite(LED_PRN_Data_Bit_4, HIGH); } else { Bit_Data = Bit_Data & 0b11101111; digitalWrite(LED_PRN_Data_Bit_4, LOW); } if (digitalRead(IN_PRN_Data_Bit_5)) { Bit_Data = Bit_Data | 0b00100000; digitalWrite(LED_PRN_Data_Bit_5, HIGH); } else { Bit_Data = Bit_Data & 0b11011111; digitalWrite(LED_PRN_Data_Bit_5, LOW); } if (analogRead(IN_PRN_Data_Bit_6) > 300)//Arduino Nanoは、A6とA7がアナログ入力専用 { Bit_Data = Bit_Data | 0b01000000; digitalWrite(LED_PRN_Data_Bit_6, HIGH); } else { Bit_Data = Bit_Data & 0b10111111; digitalWrite(LED_PRN_Data_Bit_6, LOW); } if (analogRead(IN_PRN_Data_Bit_7) > 300)//Arduino Nanoは、A6とA7がアナログ入力専用 { Bit_Data = Bit_Data | 0b10000000; digitalWrite(LED_PRN_Data_Bit_7, HIGH); } else { Bit_Data = Bit_Data & 0b01111111; digitalWrite(LED_PRN_Data_Bit_7, LOW); } if (!digitalRead(IN_PRN_Strobe))//Printer Strobe信号は反転している STROBE ONでLOW、STROBE OFFでHIGH { Status_STROBE = true; digitalWrite(LED_PRN_Strobe, HIGH); } else { Status_STROBE = false; digitalWrite(LED_PRN_Strobe, LOW); }//================================================ //BUSY トグル ボタンの処理//================================================ if (!digitalRead(BTN_Busy_Toggle))//ボタンが押されLOW { if(Status_BUSY) { Status_BUSY = false; digitalWrite(OUT_and_LED_PRN_Busy, LOW); Serial.print("BUSY => NOT BUSY by user\r\n"); if(Status_STROBE) { Status_Flag = 1; } else { Status_Flag = 4; } } else { Status_BUSY = true; digitalWrite(OUT_and_LED_PRN_Busy, HIGH); Serial.print("NOT BUSY => BUSY by user\r\n"); if(Status_STROBE) { Status_Flag = 2; } else { Status_Flag = 3; } }// Status_Flag = 0;//STROBE ON and BUSY delay(100); }//================================================ //プロトコル(通信手順)の処理//================================================ if (Status_STROBE && !Status_BUSY) { if(Status_Flag!=1) { Serial.print("====================\r\n"); Serial.print("Detect STROBE ON\r\n"); Status_BUSY = true; digitalWrite(OUT_and_LED_PRN_Busy, HIGH); Serial.print("NOT BUSY => BUSY (Auto)\r\n"); Serial.print("Read PRN Data bit\r\n"); Serial.print("--------------------\r\n"); putb(Bit_Data); Serial.print("--------------------\r\n"); Status_Flag = 1;//STROBE ON and BUSY } } else if (Status_STROBE && Status_BUSY) { if(Status_Flag!=2) { Serial.print("Waiting STROBE OFF\r\n"); Status_Flag = 2;//STROBE ON and BUSY } delay(100); } else if (!Status_STROBE && Status_BUSY) { if(Status_Flag!=3) { Serial.print("Detect STROBE OFF\r\n"); Status_BUSY = false; digitalWrite(OUT_and_LED_PRN_Busy, LOW); Serial.print("BUSY => NOT BUSY (Auto)\r\n"); Status_Flag = 3;//STROBE OFF and NOT BUSY } } else//!Status_STROBE && !Status_BUSY { if(Status_Flag!=4) { Serial.print("Waiting STROBE ON\r\n"); Serial.print("Ready to read bit DATA!\r\n"); //putb(Bit_Data); Status_Flag = 4;//STROBE OFF and NOT BUSY } delay(100); }}void printb(unsigned char v) { unsigned char mask = (char)1 << (sizeof(v) * 7); do Serial.print(mask & v ? '1' : '0'); while (mask >>= 1);}void putb(unsigned char v) { Serial.print('0'), Serial.print('b'), printb(v), Serial.print("\r\n");}
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その2)
PC-9801単方向通信のラインとArduino Nanoによる制御についてです。単方向通信のプリンタポートの通信は、各ラインに1bitが割り当てられ、8ラインを使用して、8bitを同時に送信します。これ以外にSTROBEに1ライン、唯一プリンタ側から送られるBUSYに1ライン、グランドに1ライン、合計で11ラインが使用されます。このあたりは、先人の方々が色々調査され情報を公開されています。これらの11ラインをArduino NanoのInput、Output、GNDに接続して、制御を行います。なお、GND以外は、10kオームの保護抵抗を入れています。9801とプリンタ間の通信手順についても、先人の方が調査され公開されています。通信手順に応じて、Arduino NanoにBUSY信号の制御を行うプログラミングや、プリンタポートそれぞれのラインの状態をArduino Nanoから、Serial.printで、シリアルモニタ(Arduinoのプログラミングツール付属の簡易ターミナルソフトウェア)に出力するプログラミングを行いました。また、Arduino側には、プッシュボタンを取り付けていますが、これは、BUSY信号のオン/オフのトグル用で、プリンターの動作を手動でエミュレートします。 なお、モニタ用のPCやシリアルモニタがなくとも、各ラインのチェックが行える様に9個のLEDを取り付けました。(追加で、1個はArduino内蔵LEDを使用します)Arduino Nano周辺の配線図は、以下を確認ください。アンフェノールセントロニクスハーフピッチ20Pinプリンタコネクタ側のPin番号は、以下の写真のとおりとなります。なお、98ノート側のPin番号は、この写真の鏡面像に相当するPin番号の配置となります。9801シリーズに20Pinのプリンタポートが登場するよりも以前には、14Pinのアンフェノールセントロニクスフルピッチのプリンタポートがありましたが、Pin番号を読み替えて配線すると、今回作成したプリンタポートチェッカーは、そのまま利用することができます。Pin番号読み替えの為の情報は、先人のブログで紹介されていますので、ここでは述べません。9821シリーズで採用された36Pinのアンフェノールセントロニクスハーフピッチのプリンタポートについては、双方向通信が可能なため、今回の様なプリンタポートチェッカーに頼らずとも、2台のPC間をパラレルクロスリンクケーブルでつなぎ、RDiskなのどDOSアプリで動作確認が可能です。また、双方向通信が可能な9821シリーズでは、プリンタのI/Oアドレスが異なっていて、この後で紹介する9801ノート側のチェッカースクリプトはそのままでは動作しません。今回作成したチェッカーは、あくまでも単方向通信しかサポートされていない9801シリーズでの使用を前提にいています。その3では、プログラム(スケッチ)を紹介します。
2022.05.06
コメント(0)
-
98ノートのプリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成しました。(その1)
98ノートのプリンタポートチェッカーを作った背景です。98ノートは、1990年代に国民機としてたいへん普及したNEC製のノートPCで、その仕様は、海外製のPCと互換性がなく、Windows95発売までは、国内のPC市場は鎖国状況にあり、NECの98シリーズの1人勝ちの時代がありました。最近になって、当時使用していたPC-9801NX/Cを押し入れ深くから、引っ張り出して電源を入れてみましたが、30年前の製品であり、さすがに起動しませんでした、電源を入れっぱなしにしてしばらく放置すると起動することもあったのですが、電解コンデンサの液漏れによる故障の症状の様です。ネットで色々物色していると、壊れた98ノートであっても、いまだにオークションでさかんに取引されていて、メンテナンス済の完動品であれば、かなり高額で取引されていること知りました。ネット情報では、電解コンデンサの全交換というのが、キーワードの様でしたので、私もオークションでの高額売却を夢見て、メンテナンスにチャレンジし成功しました。メンテナンス後の98ノートの外部マウスポート、10Keyポート、110pin拡張ポート、PCカード、モデムスロット、外部ディスプレイアダプタ接続用コネクタなどのI/Oの動作確認は、何らかの周辺機器を取り付けて調べることができましたが、プリンタポートだけは、動作確認環境がなく、チェックすることが出来ませんでした。9821シリーズや、DOS/V互換機のプリンタポートであれば、インターリンクケーブルでつないで、パラレル双方向データ通信によるファイル送信などにより、プリンタポート(パラレルポート)の動作確認ができるものの、9801ノートシリーズは、単方向通信しかできず、同様の確認方法がとれません。単方向通信しかできない98ノートのプリンタポートは、下の写真にあるアンフェノールセントロニクスハーフピッチ20PinのコネクタがPC-9801N、PC-9801NS、PC-9801NV、PC-9801NC、PC-9801NS/E、PC-9801NS/T、PC-9801NL、PC-9801NS/L、PC-9801NA/C、PC-9801NS/R、PC-9801NX/C、PC-9801NL/Rで使用されています。なお、PC-9801NS/Aでは、アンフェノールセントロニクスハーフピッチ36Pinが使用されていますが、双方向通信に対応しているか否かは未確認です。(それ以前の9801シリーズではアンフェノールセントロニクスフルピッチ14Pinもあるそうです)プリンタポートの動作確認方法として、実際にプリンタを繋げてみることも考えられますので、当時のプリンタをオークションで入手も検討しました。ところが、30年前の正常動作するプリンタの入手は困難で、プリンタリボンなどのサプライン品の供給もされておらず、98ノートのプリンタポートの動作確認のためにオークションで当時のプリンタを入手する気にはなれませんでした。そこで、メンテナンスの終わった98ノートを『プリンタポート動作環境なしのため未チェック』と注意書きを書いて、オークションに強行出品したのですが、かなり高額な取引となりました。ところが、直ぐに落札者の方から連絡が来ました。落札者の方に状況を聞くと、プリンタポートに異常があるとのことでした。プリンタを繋いでるのではなく、工場の保守用の機器をプリンタポートに繋いでいて、当時の98用のソフトウェアしか使えず、非常に困られているとのことでした。改めて、98ノートの産業用の需要が、今だにあることに気づかされました。さて、送り返されてきた98ノートPCですが、どうやってプリンタポートの動作チェックをすれば良いか色々と検討してみました。単方向通信の仕様(アンフェノールセントロニクスハーフピッチ20pin)なので、動作するプリンタがなければ、チェックする手段としてのハードルは高いと言えます。そこで、家に転がっていた、Arduino Nanoの互換品(AVR マイコン)を利用して、プリンタポートチェッカー (PC-9801単方向 20pinタイプ)を作成してみました。その2のブログから、作成記事を書きます。
2022.05.05
コメント(0)
-

Pocket GPS PG-S1のRoll Over対策、Displayとバッテリーの交換
Roll Overに加えDisplay点灯せずの状態から復活しました。2010年購入のPocket GPS PG-S1です。2010年に購入し、経年劣化で徐々にディスプレイが映らなくなり、電池の充電も出来なくなり、PC用のGPSとしてなんとか利用してきましたが、2019年のロールオーバーで日時が1999年と表示される様になり、とても気に入っていたGPSロガーだったのですが廃棄する予定でした。ところが、全てが復活しました。・OLEDディスプレー(NVK-128SC008F)がaitendoで入手( http://www.aitendo.com/product/3124 )でき、はんだ作業なしに、フラットケーブルのソケットの抜き差しだけでディスプレーが映る様になりました。・バッテリーは、ほぼ同じサイズリチウムポリマー電池が同じくaitendoで入手( http://www.aitendo.com/product/18693 )できたのでソケットプラグの変更は必要でしたが、12時間程度持つ様になりました。・2019年4月7日に起きたGPSの週数ロールオーバーへの対応は、PG-S1自体が製造中止品であるために、メーカーの対応は行われていません。使用されているGPS moduleのMedia Teck社のMT3329ですがですが、同moduleを使用している他社製品のfirm wareをいくつか試したところ、Columbus社のV-800+のロールオーバー対策Firm Wareで正常に動作することがわかりました。Firm wareの導入は、以下の手順でできます。1:PCにPG-S1が外付けGPSモジュールとして認識される様にUSBドライバ( http://www.hanwha-japan.com/products/pgs1/software/USB-Driver-Installer.zip )を導入する。2:PG-S1のGPS Receiverの設定をYESでUSB接続に設定する。3:Columbus社のV-800+のロールオーバー対策Firm Ware( http://canadagps.com/blog/wp-content/uploads/2019/05/V-800_WNRO_EN.zip )を展開して実行し、該当するCOM portでBaud Rateを9600bpsでRun Updateボタンを押ししばらく待つ。4:GPS moduleのMT3329の設定ソフトウェアのminiGPS( https://www.cbgps.com/download/MiniGPS_1.39.rar )を展開して実行し、該当するCOM portを9600bpsで開く。setupのタブで写真の通りに設定する。これで、まだまだ使える様になりました。Pocket GPS PG-S1の情報がほとんどないので、情報発信させて頂きました。
2019.11.17
コメント(2)
-

長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その7)
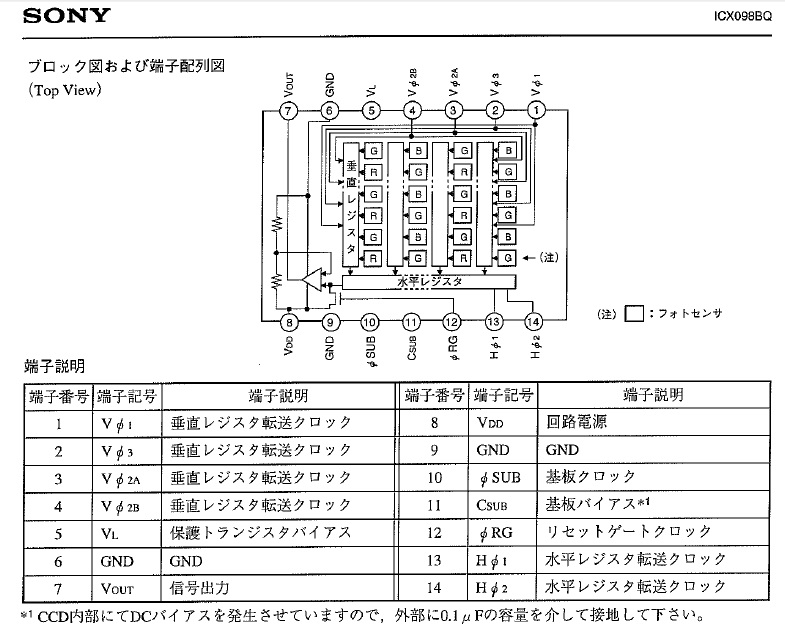
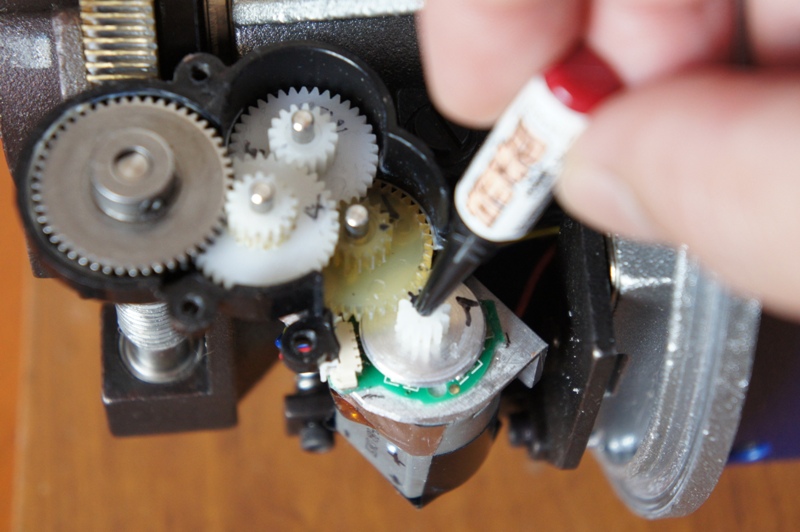
いつまで同じ内容の日記を書いているんだと言われそうですが、休日を利用して、少し進めることができましたので、中間報告します。結論からですが、WebCam(ToUCam ProII)のオリジナルのCCDであるICX098BQを高感度のEXViewHAD CCDのICX618ALAに乗せ換え画像を得ることはできましたが、良い事ばかりではありませんでした。以下がオリジナルのCCDとExView HADのICX618ALAの比較の写真です。上段ICX098BQ(WebCam ToUCam Pro IIのオリジナルのCCD)下段ICX618ALA(ExView HAD CCD)共に、明りを消した部屋(唯一ノートPCモニタの光源のみ)でWebCamのレンズにて、明るさその他のパラメーターを固定。白黒モーで撮影、ゲインはMin、シャッタスピードは無効(SC-1改造)、露光時間は15秒で撮影(SC-1改造)。確かにICX618ALAの感度は、スペックどおり向上が見られます。ですが、ごらんのとおり、ノイズが多いのです。このノイズは、どのフレームでも同じ場所に出ているので、ホットピクセルと思われます。CCDガラス面の保護フィルムを除去していないので、それが原因かもしれませんが、かなり多い印象です。CCDは、中国のショップ(Alibaba)から入手したのですが、品質の悪いCCDだったかもしれません。ICX618ALAは、もう1つあるので、そちらも試してみようと思います。ダーク減算で消えてくれる事を祈りますが、メインカメラにするには難しそうです。長時間露光ではなく、通常の画像転送であれば、ホットピクセルは目立ちませんので、ガイドカメラ専用と割り切った方がよさそうです。今回、改造のベースとしたWebCamは、ToUCam ProIIです。理由は、QCam Pro4000より改造がしやすいからです。CCDを剥がす作用も以下の動画の様にあったいう間です。チップクイックという低温半田を用いて作用します。そもそも、CCDを剥がすことになったのは、ミラーレスマウントアダプタに組み込んだオフアキで合焦させるためでしたので、少し長めのリードをICX618ALAに取り付けました。なお結線は前回の日記での私の記載した結線方法では、画像が得られず、先人の結線方法が正しい方法でした。また、国内にも白黒のICX098AL(DMK21AF04)のCCDをICX618ALAに乗せ換えた方がいらっしゃいますが、この方の情報でも、同様な結線でした。以下が正しい結線です。ICX098BQ(基板ランド)のPin番号 - ICX618ALAのPin番号 1 垂直レジスタ転送クロック - 5 3,4 2 垂直レジスタ転送クロック - 6 3 垂直レジスタ転送クロック - 1,2 4 垂直レジスタ転送クロック - 3,4 5 5 保護トランジスタバイアス - 7 6 GND - 10 7 Vout - 8 8 VDD - 9 9 GND - 10(同上) 10 基板クロック - 11 11 基板バイアス - 12 リセットゲートクロック - 12 13 水平レジスタ転送クロック - 13 14 水平レジスタ転送クロック - 14随分と前にSC1改造(長時間露光),SC-2改造(アンプオフ),ST-4用のバッファを搭載した拡張基板だけ完成していましたが、ToUCam ProIIの基板と結線して、すべての機能は正常に動作することが確認できました。今回は、CCD交換による、SC-5改造WebCamの位置づけとなります。ですが、基板丸出しでは。。。。。ケースが欲しい。良いものが、部屋に転がっていました。このキシリトールガムの入れ物に組み込もうかなあ?
2014.12.23
コメント(8)
-
長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その6)
Steave Chamber氏のWebにはWebCamの2x1 Binning の改造方法が紹介されていて、CCD感度が倍になる。ということはQCamやToUcamのICX618ALAへのCCD交換で2倍の感度増光に更に2 by binning改造で倍の4倍の感度を実現できる。そのためには、更なる外部回路を要する。やるべきか、なやみどころで考え中。まずは、オートガイドダーにしたいのですが、オートガイダーで2x1 Binning の価値はあるのか知識がありません。
2014.11.25
コメント(4)
-
長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その5)
さて、WebCamのCCDの載せ替えについての自分なりの理解を書きとどめておきます。オリジナルのICX098BQは、ICX414ALやICX618ALAとの互換性はあるもののピン配置は異なります。それぞれのデータシートを比較すると垂直レジスタ転送クロック以外はピン番号は違うものの配線の変更で対応できそうです。大きな違いとしては、垂直レジスタ転送クロックの入力ピンの数となります。これを、どの様に結線すれば良いかは、データシートの波形から判断できます。ICX098BQの垂直転送クロック波形ICX414ALの場合、同じ垂直レジスタ転送クロックが利用されているので波形から以下の様に判断できます。ICX098BQのVΦ1(pin1)に相当するピンは・ICX414ALのVΦ1(pin5)・ICX618ALAのVΦ3A,VΦ3B(pin3,4)に該当ICX098BQのVΦ2A,VΦ2B(pin3,4)に相当するピンは・ICX414ALのVΦ2(pin4)・ICX618ALAのVΦ1(pin5)に該当ICX098BQのVΦ3(pin2)に相当するピンは・ICX414ALのVΦ3(pin3)・ICX618ALAのVΦ4(pin6)に該当ですが、問題はICX-618ALAのVΦ2A, VΦ2B(pin2,1)に完全に一致するものがないのです。ですが、先人は、この載せ替えに成功しているのです。おそらくは、データシートのサンプル回路図からの結線なのでしょう。ICX098BQとICX618ALAのデータシートのCXD1267AN(クロックドライバ)側から見た場合に結線です。CXD1267ANのVΦ1(pin14)・ICX098BQのVΦ2A(pin3)・ICX618ALAのVΦ2A,VΦ2B(pin2,1)CXD1267ANのVΦ2(pin15)・ICX098BQのVΦ1(pin1)・ICX618ALAのVΦ1(pin5)CXD1267ANのVΦ3(pin12)・ICX098BQのVΦ2B(pin4)・ICX618ALAのVΦ3A,VΦ3B(pin3,4)CXD1267ANのVΦ4(pin11)・ICX098BQのVΦ3(pin2)・ICX618ALAのVΦ4(pin6)これらをまとめると、オリジナルのCCD(ICX098BQ)をはがした後のランドとICX414ALやICX618ALAの結線方法は以下のとおりになります。ICX414ALの載せ替えにつては、先人の方法と全く同じ方法となります。ICX098BQ(基板ランド)のPin番号 - ICX414ALのPin番号1 垂直レジスタ転送クロック - 52 垂直レジスタ転送クロック - 33 垂直レジスタ転送クロック - 4 4 垂直レジスタ転送クロック - (4)5 保護トランジスタバイアス - 14 6 GND - 7,(1μFを介して10)7 Vout - 9 8 VDD - 12,21 9 GND - 7(同上) 10 基板クロック - 1511 基板バイアス - 2012 リセットゲートクロック - 1313 水平レジスタ転送クロック - 1614 水平レジスタ転送クロック - 17ところが、ICX618ALAの場合、本来なら以下の結線だと思うのですが、先人の結線とは異なっているのです。これは、実際に試してみなければわかりません。注:誤っている可能性があるので真似しないでください。ICX098BQ(基板ランド)のPin番号 - ICX618ALAのPin番号1 垂直レジスタ転送クロック - 52 垂直レジスタ転送クロック - 6 3 垂直レジスタ転送クロック - 1,24 垂直レジスタ転送クロック - 3,45 保護トランジスタバイアス - 76 GND - 107 Vout - 88 VDD - 99 GND - 10(同上) 10 基板クロック - 1111 基板バイアス - 12 リセットゲートクロック - 1213 水平レジスタ転送クロック - 1314 水平レジスタ転送クロック - 14ICX618ALAへの載せ替えが本当にうまくいくのか疑問を生じてきました。
2014.11.24
コメント(2)
-
長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その4)
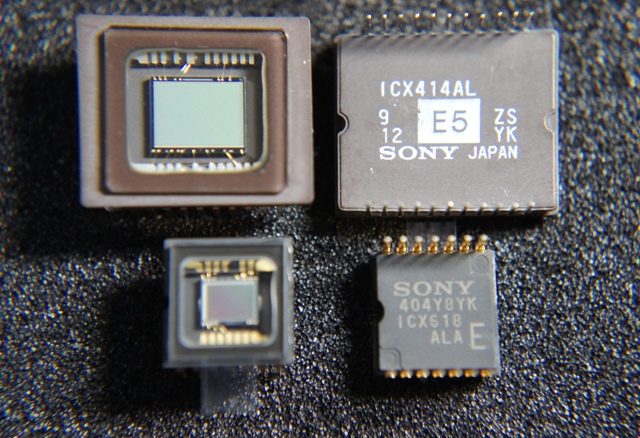
ようやく、注文していた部品がそろったのですが、部品代と同じ価格になるくらいの輸送量やDHLの国内手数料を追加でとられたり、消費税など、予想以上に経費がかかってしまいました。上がICX414AL(白黒1/2型 CCD)、下がICX618ALA(白黒1/4型 ExView HAD CCD)ICX414ALはAliExpress経由での注文で、Brand Newと表示されていたのですが、部品にはガラス面の保護フィルムがなく本当に新品なのか判断できません。到着までに約2週間かかりましたが、中国のサプライヤーから無事に届きました。 これ以外にもセカイモン経由でドイツからToUCam Pro2の中古品をゲットしました。これは、オートガイダー用と考えています。もう1つフィリップスのSPC890NCを米国のショップからグッピング経由で入手しました。奇跡的にも新品の在庫を入手できることができました。こちらは、1/2インチCCDに乗せ換えメインカメラ用と考えています。それと、CXD1267AN、これは、壊してしまったQCam Pro4000の修理用です。ようやく、作業に移れる状況になりました。
2014.11.16
コメント(8)
-
長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その3)
置き換え用CCDを注文しました。ICX618ALA(白黒1/4型 ExView HAD CCD)はAlibabaに単価$48.73usで交渉の結果、個数を減らして2個の注文を受けてくれましたが、送料と手数料として$37us請求されたのですが、受理しました。ICX414AL(白黒1/2型 CCD)はAliExpress(ぱなりさんの情報の先)で単価$65.00us で2個注文しました。こちらは送料が$10.53usでした。さて、ともに、中国ですが、1つはシンセンのショップ、もう1つは香港のショップです。とくに、混乱中の香港のショップから商品が届くのか心配です。うーーん。こうしてみると、CMOSのK-ASTECのQHY5L-IIMオートガイダー(メルマガ会員特価の29,800円)と価格的には変わらないですね。ところで、冷却CCDとオートガイダーってどこが違うのだろうか?と悩みだしました。
2014.10.29
コメント(4)
-
長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その2)
ToUCam Pro / ToUCam ProII / SPC880 / SPC890 /SPC 900 / QCam Pro 4000に搭載されているCCDであるICX098BQからのアップグレード候補のCCDとしては、先人の努力により、ICX414AICX424AICX618ALAの実績があります。その後の新しいCCDでの置き換えが可能であるか、データシートから検討しました。。(EXview HAD CCD IIのデータシートは海外のページから)結論から言うと、置き換え可能なCCDとして、それ以上新しいものはありませんでした。置き換え可能なものとしては、以下のCCDが候補となります。ICX098BQ オリジナル 1/4型 カラー HAD CCD 12.27MHzICX098BL 1/4型 白黒 HAD CCD 12.27MHzICX414AL 1/2型 白黒 HAD CCD 24.54MHzICX414AQ 1/2型 カラー HAD CCD 24.54MHzICX424AQ 1/3型 カラー HAD CCD 24.54MHzICX424AQB 1/3型 カラー HAD CCD 24.54MHzICX614ALA 1/4型 白黒 Super HAD CCD 24.54MHzICX614AKA 1/4型 カラー Super HAD CCD 24.54MHzICX614AQA 1/4型 カラー HAD CCD 24.54MHzICX618ALA 1/4型 白黒 EXview HAD CCD 24.54MHzICX618AKA 1/4型 カラー EXview HAD CCD 24.54MHzICX618AQA 1/4型 カラー EXview HAD CCD 24.54MHz上記のうち、大きさならICX414AL 1/2型 白黒 HAD CCD 24.54MHz感度では、ICX618ALA 1/4型 白黒 EXview HAD CCD 24.54MHzの2種類が2014年10月時点ではベストでしょう。残念ながら、最新型のEXview HAD CCD IIで置き換えできそうなものは見つかりませんでした。SC-5改造に為のCCDは特定できましたが、あとは、どうやってCCDを単体入手するかが大きな問題となりそうです。
2014.10.26
コメント(4)
-

長時間露光改造WebCamを高感度CCDにアップグレードしたい。(その1)
Bin-Starが天体写真に興味を持った頃、SonyのCCDであるICX098BQを搭載したWebCamの改造が注目されていた時期があります。多くは、31.7mmのチューブを取り付ける改造で惑星撮影、又はオートガイダーとして利用です。Bin-Starも、WebCamの長時間露光+2段ペルチェ冷却改造を行って楽しんでいました。ベースになる基板はロジクールQcam Pro 4000でしたが、その後、故障により、フィリップスToUCam Pro IIベースになっています。デジタル1眼入手後は、ほとんど眠っていましたが、再度引っ張り出してきました。たとえCCDであっても、今となっては、CMOSも進化してWebCamにあまり魅力を感じません。この自作カメラですが、スティーブチャンバー氏が考案したSC-2改造(長時間露光+アンプオフ)までは行っているのですが、更に高感度で、最新のCCDへの乗せ換えを行うSC-5改造を行うことをたくらんでいます。長時間改造用によく利用されているのはロジクールQCam Pro4000、フィリップスToUCam Pro、フィリップスSPC900なのですが、すべて共通するのがSONYの小さなサイズ(1/4型)のCCDであるICX098BQを利用していることです。先人たちの努力により約2倍の感度であり、EXViewのモノクロCCDであるICX618ALAや、1/2のサイズのモノクロCCDであるICX414ALへ乗せ換え方法が公開されています。1/4サイズCCDはガイドカメラ用、1/2サイズCCDは撮影用カメラ用で使い分けられている様です。現在、データシートを調査中なのですが、更に高感度で新しいCCDへの乗せ換えができるか検討している最中です。すでにSC-5改造に向けて拡張基板は完成しています。ST-4端子を装備しています。ですが、肝心のWebCam基板の改造で、続けて失敗してしまいました。手持ちのロジクールQCam Pro4000を2つ所有しているのですが、1つは垂直クロックドライバICのCXD1267ANの脚(ピン)を折ってしまい、もう1つはなぜが同期がうまくいかず変な画像しか表示されない状況になってしまいました。共に、垂直クロックドライバICのCXD1267ANの故障なので、交換用のICを入手するつもりですが、昔は平気だった細かい作業が、50歳近くになって出来なくなってきた事に少しショックを覚えます。なので、QCamよりも作業がはるかに楽なフィリップスToUCam ProかフィリップスSPC900をベースとしてやり直そうと思います。日本では、WebCamの長時間露光改造に成功したした人は少ないと思います。理由は改造の楽なフィリップスToUCam Pro/Pro II、フィリップスSPC900/890/880が国内で販売されておらず、改造の難しいQCam Pro 4000しか入手できなかった事にあるかもしれません。SPC900/890/880では基板ランドへのハンダ付けなしで基板コネクタへの配線のみで長時間露光改造ができますし、ToUCam Pro/Pro IIでは、CCDはがしが楽にできます。おそらく時代遅れのToUCam Pro/Pro IIやSPC900/890/880はガイドや撮影を行っている方は少ないと思いますが、長時間改造や高感度CCDへの乗せ換えをすれば、ガイド用又は撮影用に再度利用できると思います。
2014.10.21
コメント(8)
-

赤道儀による月の1軸追尾について考える
今回の皆既月食は仕事の関係で無理かと予想していたものの、かすかな期待をもって前日より準備しました。が。案の定、仕事が終わらず予定していた連続写真撮影はかないませんでした。でも、随分と早い時間の月食でしたね。外勤先で撮れたのはこれくらいです。阿倍野ハルカス近くスマホのカメラ オートさて、前日の準備での月の追尾については、解決できていないことがあります。追尾の目的は、フレーム中央に月を留めておき、動画に仕上げることです。ピクセル単位の精度を求めている訳ではありません。2014年10月08日の皆既月食で、Sidereal(恒星時)の追尾をした場合、どのくらい流れるかを理論的に考えてみました。部分食の始まり(18:15)の月の座標:0h54.4m +5°27'部分食の終わり(21:34)の月の座標:1h00.8m +6°07'月食の初めから終わりまで、赤道儀のTracking rateをSidereal(恒星時)で追尾した場合のズレはRA方向で1.6°(月の視直径の約3倍)DEC方向で0.7°(月の視直径の約1.5倍)流れることになる様です。RA方向は恒星の96.3%の速度で追尾すれば良いのですが、さて、DEC方向はどう対応すれば良いのでしょうか?赤道儀の極軸を向ける方向は北極星にしていましたが、赤道儀の極軸を向ける最適な位置をどうやって求めるのでしょうか?謎は深まります。面倒なのでDECの修正は手動追尾が良いかも?
2014.10.10
コメント(2)
-

SiderealでのTracking rateで月は流れる。
今回は、オートガイドの話ではなく、月のTracking rateの話です。 それもBin-Star1号機の初心者向け赤道儀のMeade-114EQの1軸モータードライブであるMeade DKVをポタ赤がわりにしての撮影です。 この赤道儀ですが、モータードライブが1軸ではあるもののステッピングモーター制御で、LunaのTracking rateが出せる様にBin-Starマイコンで改造済みです。 Bin-Starマイコン改造は、Meade-DKVのコントローラーのマイコンICを載せ替える方法ですが、以前ヤフオクで出品した経験があります。 改造済み本体が1つだけ落札されましたが、載せ替え用マイコンIC自体は全く人気がなく1つも落札されていません。 まずは、SiderealのTracking rateでの撮影です。 流れていくのが判る様に30分間の間の写真を動画にしました。 縦方向(上下方向)がモーター追尾方向で、今回は上下の流れ方に注目します。 写真の縦はRA方向(1軸の追尾方向)、横はDEC方向 豊中市自宅ベランダ Kenko ミラーレンズ500F6.3DX フィルターなし APS-C(NEX-5) オート Meade 114EQ赤道儀(1軸) DKVコントローラー+Bin-Starマイコン改造 Siderealモード オートガイドなし 縦方向(RA方向)の月はどんどん流れていきます。 Bin-Starマイコンでは、LunaのTracking rateをプログラムしていて、この速度で追尾した画像を動画にしたのが以下です。 写真の縦はRA方向(1軸の追尾方向)、横はDEC方向 豊中市自宅ベランダ Kenko ミラーレンズ500F6.3DX フィルターなし APS-C(NEX-5) オート Meade 114EQ赤道儀(1軸) DKVコントローラー+Bin-Starマイコン改造 Lunaモード オートガイドなし DEC(左右)方向は1軸の為、SiderealでもLunaでも流れていきますが、RA(上下)方向は比較的に保てています。 皆既月食の準備の為に撮影した写真ですが、赤道儀で大きめの月を撮るなら、Tracking rateを切り替えるのを忘れない様にした方がいいと思います。赤道儀でLunaのTracking modeが装備されている赤道儀は比較的に多いと思いますのでTracking rateの切り替えを忘れない様に! 今晩の月食にまで帰宅できるか判りませんが、もし早く帰れたら、月食撮りをする予定です。
2014.10.07
コメント(2)
-

大野山へ行った(その3)
こちらは9月23日の大野山の続きです。オフアキ化も進めていますが、大野山でガイド鏡によるオートガイドがうまく行った事例がありました。2分露光なのですがあまり流れていません。猪名川天文台駐車場TwinStar CG-5 / Seben EQ-EM10 ST-4改造AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 3200 125s × 1枚オートガイド:NexGuideISO12,800の高感度の30秒露光で撮った連続写真を動画にして、ガイドの状況を確認しました。おっつ。わすかに流れが生じているものの、比較的安定しています。この動画を位置合わせせずにコンポジットすると以下の様になりました。猪名川天文台駐車場TwinStar CG-5 / Seben EQ-EM10 ST-4改造AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 30s × 31枚オートガイド:NexGuideK3 CCD Tools(シェアウェア)でコンポジット オートガイドしていても流れる原因は、どうやら鏡筒の接眼部のフォーカサーのガタの影響が大きい様です。この写真の撮影まえにフォーカサーの固定ネジ占めつめました、でもこのネジをあまりにも締め付けるとスケアリングの問題で、片側のコマ収差がより目立ってしまいます。フォーカサーの固定ネジをタップして増やそうかなあ?でも、まずはオフアキ化をすすめねば。。。今まで球状星団って撮ったことがないのですが、大野山で初チャレンジです。結構、露出が難しいですね。たぶんM13、いやM15かな? へんな色に仕上がったけど、まあいいか!
2014.10.02
コメント(2)
-

高野龍神スカイライン鶴姫公園まで遠征した。
あーっつ、疲れた。豊中から、4時間かけて高野龍神スカイラインまで遠征しました。高野山周辺は、関西の星撮りのメッカで一度は行ってみたいと思っていたところです。初めてで道をよく知らなかったので橋本というところから371号線に入り、いけどもいけども1車線しかないワインディングロードが続く。護摩山スカイタワーについた時は、こんな場所なら2度と来たくないなあと思ってしまいました。ですが、現地でお聞きすると、志賀ロンネル超え阪和自動車道に抜ける道は走り易いとの情報を頂きました。結局、護摩山スカイタワーは霧で視界が悪かったので、高野龍神スカイラインを戻り、鶴姫公園というところで車を止めた。鶴姫公園も関西の星見スポットとしてかなり有名な場所です。鶴姫公園ではスカイライン沿いと更に奥にも駐車場があります。奥の駐車場は車のライトを避けれるかもしれませんが、風が強そうな場所でした。到着した時は暗く、よく判らなかったので結局スカイライン沿いの駐車場に機材を広げました。朝になって、ようやくこんな場所だったんだと判りました。この駐車場には、よく来られている3名の天体写真のブロガーの方々と楽しいひと時を過ごしました。ありがとございました。少し気が早いけど、冬の馬頭が登っていたのでチャレンジしました。巨大なゴーストが出ていますが、私としては良く出来た方かと思います。高野龍神スカイライン鶴姫公園駐車場TwinStar CG-5 / Seben EQ-EM10 ST-4改造AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 30s × 30枚オートガイド:NexGuideK3 CCD Tools(シェアウェア)でコンポジット実は、今回は空がいいせいか低感度で5分露光でも比較的流れが少ない写真も撮れました。高野龍神スカイライン鶴姫公園駐車場TwinStar CG-5 / Seben EQ-EM10 ST-4改造AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 1600 313s × 1枚オートガイド:NexGuideMSオフィスピクチャーマネージャーのみで調整せっかくの長距離遠征だったのですが、他の写真はことごとく失敗。2重星団は、家のPCモニタで見て唖然としました。拡大トリミングしています。あーあ!ドブのおやじさんの薦めで勾玉もチャレンジしました。赤が難しい。というか構図を間違えてしまいました。バブルもチャレンジしたのですが、ノーマルNEXではかなり厳しそうです。この様な天体は長時間露光が必須ですね。30秒露光では無理そうです。拡大トリミングしても泡は見えません。という事で薄明が近くなってきました。その時、黄道光なるものを初めて見ました。ドブのおやじさんが教えてくれました。高野龍神スカイライン鶴姫公園駐車場は、確かに星撮りのメッカですね。帰り道は志賀トンネル経由にしましたが、ちゃんと2車線ある道路が続きますので快適でした。また機会があったら行きたいなあ!
2014.09.28
コメント(12)
-

大野山へ行った(その2)
前回の未処理画像です。いつもの超高感度ISO12,800の30秒露光の写真をコンポジット画像処理をしました。猪名川天文台駐車場TwinStar CG-5 / Seben EQ-EM10 ST-4改造AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当) LPS-P2 + NEX内部デジタルフィルタ9900K M9 APS-C(NEX-5) ISO 12,800 30s × 50枚 オートガイド:NexGuide K3 CCD Tools(シェアウェア)でコンポジット全体に色が付いている様な写真では、高感度撮りでは荒れが目立ちますね。やはり低感度、長時間露光ができる様にしたい。
2014.09.27
コメント(2)
-

大野山へ行った
久しぶりの晴れだったので猪名川天文台にまで行ってきました。ミラーレスマウントアダプタのオフアキ化はまだ進んでいないので、今回も、AT6IN(銀次150FNと同型)を連れて行いきました。いつもの超高感度ISO12,800の30秒露光でコンポジット画像処理をしました。猪名川天文台駐車場TwinStar CG-5 / Seben EQ-EM10 ST-4改造AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 30s × 33枚オートガイド:NexGuideK3 CCD Tools(シェアウェア)でコンポジット
2014.09.23
コメント(10)
-
ミラーレスのマウントアダプタ内にオフアキは組み込めるか?(その4)
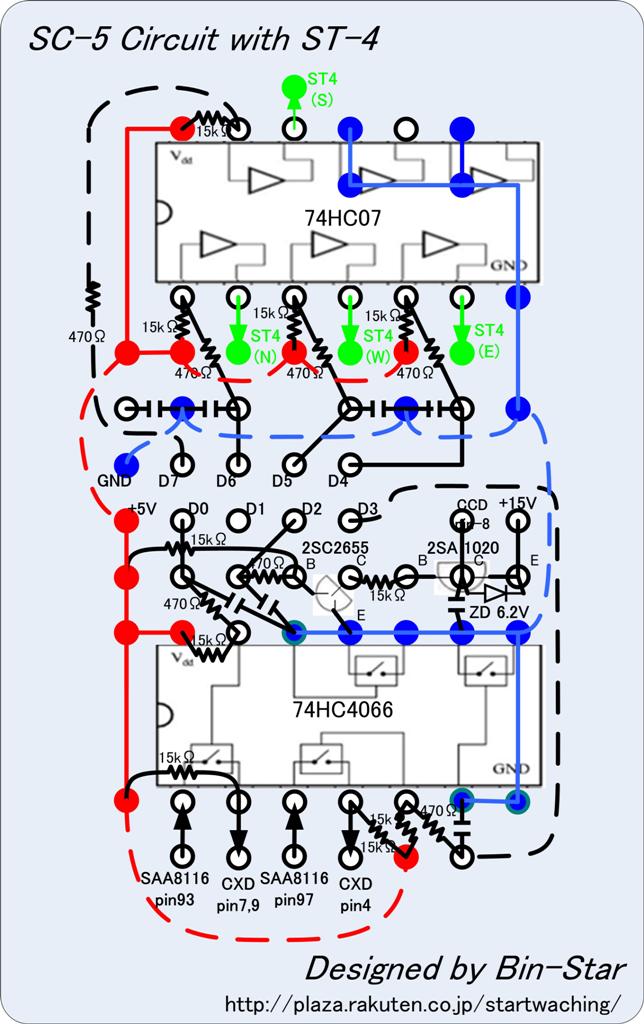
ミラーレスのマウントアダプタ内にオフアキ化では光路長の問題からガイドカメラの受光素子はがしの改造を要することになります。なので、長時間露光改造の実績のあるQCam Pro 4000でまず試しみようと思いました。QCam Pro 4000は、随分昔に改造用に購入したものですが、取り置きがあったのでこれを利用することにしました。今回もSteave Chamber氏の考案した改造を予定しています。この改造は氏のイニシャルをとってSC-1からSC-5までの改造名がつけられています。番号が大きくなるほど、より複雑な改造となります。随分昔ですが、Bin-StarでもSC-1改造(長時間露光)とSC-2改造(アンプオフ)に関する記事を取り上げました。今回は、オートガイド端子の増設を伴うSC-5改造です。正確には、CCDは剥がすものの取り換えずにそのまま利用するので、SC3-4改造のステップを省略したSC-5改造となります。とりあえず、増設する基板配線図をユニバーサル基板用に考えました。点線はシールドされたジャンパ線を意味します。長時間露光とアンプオフの原理や回路図はココにあります。ST-4増設は、オーオガイダー側の端子の保護を目的とする単純なオープンドレインバッファの構成です。なお、Steave Chamber氏はこの改造方法について営利目的での利用を禁じています。にもかかわらず、ヤフオクではQCamの長時間露光の改造を実施している悪質な業者がいますので注意下さい。ヤフオクで見かけられた方は、不適切な出品としてヤフオクに報告下さい。Bin-Star
2014.09.13
コメント(2)
-

ミラーレスのマウントアダプタ内にオフアキは組み込めるか?(その3)
天文関係の活動もブログもほぼ休止状態でしたが、少し時間的な余裕が取れたのでミラーレスのマウントアダプタ内のオフアキ組み込みを少しだけですが進めることができました。平行光線がCCDにかからない位置でプリズムを固定できる様にしましたが、実写しての調整が必要と思われます。あと数ミリ中心方向に移動させた方がよいかなと思っています。写真右の上部の穴がクイックスチールによる成形です。1.25インチバレルの取り付け位置の高さや角度を調整するため、ローレットネジで固定する様にしました。受光素子のガラス面が1.25インチバレルの底に接するところで合焦することを確認したのですが、ガラス面の傷の予防のため、プリズムとバレル底までのチューブを短縮しました。3mm短縮させるつもりが4mmも短縮させてしまいました。残るは、どうやって合焦位置に受光素子をもってくるかです。当初、補正レンズなどで、焦点距離を後ろに伸ばすことも考えたのですが、1.25インチバレルの底付近で合焦することがわかったので、受光素子を基板から剥ぎ取り、1.25インチチューブの先端に固定する方向で作業を進めています。
2014.09.11
コメント(6)
-

ミラーレスのマウントアダプタ内にオフアキは組み込めるか?(その2)
ずいぶん前に、ミラーレスのマウントアダプタにオフアキが組み込めないか検証してそのまま合焦が困難であることから放置していたのですが、とうとう重い腰を上げました。重い腰を上げた理由は、長時間露光の為ですが、オートガイドしていても流れてしまうからです。最初にミラーレスのマウントアダプタにオフアキが組み込もうと思った当時は、TwinStar CG-5赤道儀+AT6IN(ケンコーACクローズアップレンズNo.5;460mm相当)で流れる。今回は、Meade LX-80+Meade 25cm Wide-Field 1600mmで流れる。ともに、600mmのガイド鏡につけたNexGuideのモニタ上では、クロスのセンターにビシッツととどまっているにもかかわらず、主鏡のデジカメでは流れてしまうという現象を解決できずにいます。おそらくは、各部のたわみやミラーシフトなど、種々の要因が複合して、ガイド鏡上は追尾できていても、主鏡上はズレでしまっているということが考えられますが、その検証のためにもオフアキを試したいと思ったわけです。 でも普通にオフアキしても面白くないので、ずいぶん昔に検討したミラーレスのマウントアダプタにオフアキを組み込むチャレンジをしてみたいと思います。NEX-EOSマウントアダプタにドリルで穴をあけ、セレストロン#94176 Radial Guiderを分解して、プリズムと光路の筒と31.7チューブのみを取り出し、マウントアダプタにクイックスチールで固めてみました。光路図は、以前に検討したものをそのまま適応しています。今日はここで作業終了、次回は、クイックスチールをきれいに整形して着色したいと思います。当時より懸案である合焦が困難である問題については、オートガイダーのCCDはがし又は中間の光学レンズを挟むことでの対応を考えていますが、どちらが適切なのか現時点では判断ついていません。いずれにせよ、もうしばらくかかりそうです。ミラーレスのマウントアダプタにオフアキを組み込むアイデアはある様ですが、おそらく本当に実行しようとしているのは私が初めてかもしれません。
2014.06.08
コメント(6)
-

ガイドはうまくいってそうなのだけど、流れる。
前回は、軽量の鏡筒(AT6IN)を用いてLX80の追尾精度を見てみましたが、今回は、重量級のMeade 25cm SCを載せてLX80の追尾精度を見てみました。ハンドコントローラのMeade Audio-Starのパラメーターは、前回から変更していません。リセット後のDefault値と異なるのは、RA ratioとRA Percentです。LX80とAudoioStarのパラメーター・ファームウェアA3S4(Star Patch導入)・GEM EQモード・Astronomical・RA ratio:2.75074479・RA Percent:60%・PEC Erase後にON鏡筒・Meade 25cm F6.3 Wide-Field 1600mmカメラ・APS-C(NEX-5)オートガイド・NexGuide今回は、バルブで5分間の単写もやってみたのですが、カメラモニタで判るほど、流れてしまっています。そこで、いつもの30S露光の連続写真(総計30分)を撮影して、追尾精度がどうなのかを見てみました。30秒露光の連続画像を見る限り、やはり流れていくのです。前回に試したの軽量鏡筒(AT6IN)を載せたLX80の追尾状況に明らかに劣っているかの様に見えます。このままでは、バルブによる長時間露光は望めません。ここで、非常に不思議なのは、600mmのガイド鏡でのNexGuideのモニタでは十字のセンターにビッシと留まりガイドはうまくいっている様なのです。ですが、1600mmのSC鏡のカメラモニタ上では流れているのです。うーーーーん。いろんな部分のたわみかな?又は古いSC鏡なので、ミラーシフトなのかなあ?やはり、オフアキが必要なのかなあ?25cm鏡を使いこなすにはまだ時間がかかりそうです。
2014.05.19
コメント(4)
-
天体用WebCam専用PCとしてWin98SEノートを復活
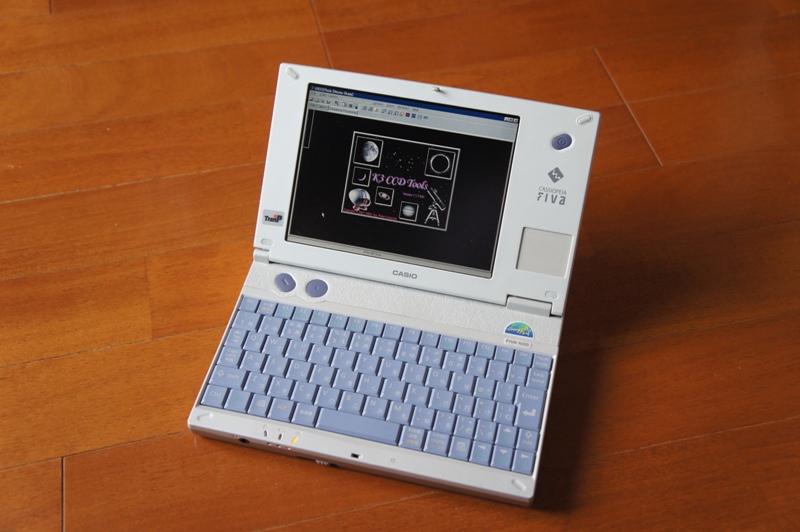
天体用PCなら、処理能力の高い最新型のモバイルPCを購入すればいいじゃないかと思われる方も多いでしょうが、動かないソフトがあったりします。シェアウェアのK3CCDToolsは現在でも64bit VISTAに入れて画像処理に利用していますが、長時間露光改造WebCamの制御の機能は古いPCでしか動作しません。すでに、2000年に製造中止となっているのですが、カシオ計算機のカシオペアFIVA(MPC-103)なる今となっては非力な300MHzのモバイルPCがあり、WebCam改造で天体写真を撮り始めたころにはこのPCをよく利用していました。ですが、画面が映らなくなったり、HDDに不良セクタができたり、またカメラもミラーレス購入後は、ほとんど利用しなくなってしまいました。故障してもHDDはそのままで、ヤフオクにFIVAの出品があると部品どりを目的に落札して修理し、今でも動作しています。このWin98SEのPCには、シェアウェアのK3CCDToolsを当時導入しているのですが、K3CCDToolsのシェアウェアのロック解除パスワードが個別認識でありOSを再インストールした場合、パスワードが無効になってしまうのです。最新型のモバイルPCに乗り換えられない訳は、長時間露光改造WebCamをK3CCDToolsで制御する必要があるためです。KameさんがQCamを今でも使用されているのを見て、火がついてしまいました。少しでも性能アップしておきたいので今回は、改造を試みました。このPC(MPC-103)は、最大64MBまでのPC100メモリまでがサポートされていてそれ以上の大きさのメモリはバイオスが認識できません。またHDDも32GB以上の大きさはバイオスが認識できません。そこでまずは、HDDのSSD化です。32GB未満のSSDとなると16GBとなってしまいますので、現在積んでいる30GBのHDDよりも容量が小さくなってしまいます。そこでネットで色々調べて、バイオスが認識する限界近くの30GBのSSDを物色しIDE接続の方法を調べたところ、この組み合わせで実現できることがわかりました。30GBのSSDとしては、mSATAと呼ばれるずいぶん小さな規格のものがあり、これをIDEに変換するアダプタがあるのです。インテル SSDMCEAC030B301玄人志向変換基盤 [mSATA SSD ⇒ 2.5型IDE SSD] KRHK-MSATA/I9続いてメモリなのですがこれもバイオス上では64MBを超えるメモリは認識されません。FIVAの改造を紹介している諸先輩方が最大512MBまで認識できるバイオスのパッチを公開して下さっています。同じPC-133の512MBのメモリでも動作するメモリは限られ、私も数種類試しましたがバッファロー純正のVN133-512MYのみでした。また中古品もよく出回っています。バッファローPC/133 512MB(VN133-512MY)また、メモリの62pinと68pinをジャンパするCKE改造のためはんだ作業を要します。これらの改造により、SSD30GB、メモリ512MBのWin98SE機となり蘇りました。 ハイバーネート・レジュームとも動作します。 ついでに、今でもWin98をサポートしてくれているSUPER STAR IVを導入しました。かろうじてXpも動くのでデュアルブートにしています。Xpなら動くステラナビゲーター9もなんとか動きます(さすがにサクサク感はありません)。データの受け渡しはPCMCIAカードスロットのアダプタを用意しました。リチウムイオンバッテリーもセルのみ交換してくれるサービスがあったので、新品に交換し、4時間以上持つ様になりました。注意しなければならないのは、Win98SEやXpはすでにサポートが終了し、セキュリティー上の問題が生じるリスクがあります。無線による望遠鏡制御もしたいので、無線LANには繋げてもWANからは遮断しての使用に限定したいと思います。それでも危険なのかな?とりあえず、これでWebCam撮影を再開できそうです。
2014.05.06
コメント(4)
-
神野山まで遠征
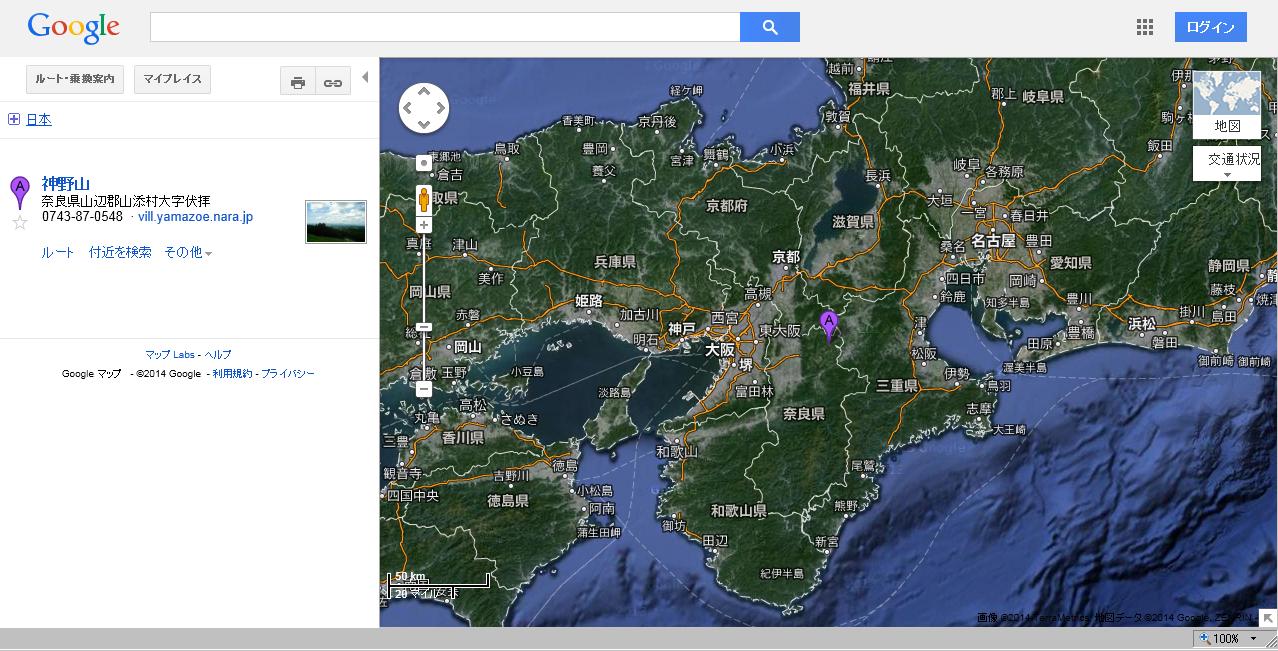
曇天でしたが、GPV予報でのわずかな晴れ間をねらって、2014/04/30に神野山まで遠征してきました。山の読み方は"こうのやま"で高野山と間違いそうです。神野山の標高は、618mで、Bin-Starお気に入りの猪名川天文台のある標高754Mの大野山とほぼ同じ標高で、共に非常に車のアクセスがよく、光害も同じ様なレベルの印象です。猪名川天文台は、天頂から北西にかけての空が暗く、神野山は天頂から南東にかけての空が暗く、猪名川天文台と神野山の空は対称的で、また、大阪から見て、猪名川天文台は北西、神野山は南東に位置していて、GPV予報により行先を変更する候補となりそうです。駐車場に赤道儀を広げられるのですが、駐車場は舗装されています。この場所の特徴として、周囲の立木が風を防いでくれることでしょうか?今回の目的は、Meade LX80のRA Percentのパラメータ変更による追尾精度のテストで、ガスが多く、シーイングが良い空ではありませんでしたが、いくつかの天体を撮影することができました。神野山駐車場Meade LX-80(GEM-EQモード/ A3S4 Star Patch / One Star アライメント / RA ratio:2.75074479 / RA Percent:60% / PEC Erase後にON)AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 30s × 30枚オートガイド:NexGuideK3 CCD Tools(シェアウェア)でコンポジットM101(回転花火銀河)ですが、AT6INでは小さすぎますね!次は25cmで狙いたいと思います。神野山駐車場Meade LX-80(GEM-EQモード/ A3S4 Star Patch / One Star アライメント / RA ratio:2.75074479 / RA Percent:60% / PEC Erase後にON)AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 20s × 40枚オートガイド:なしK3 CCD Tools(シェアウェア)でコンポジット南天のM8(干潟星雲)/M20(三裂星雲)は、猪名川天文台で撮影した写真よりコントラストが良い印象をもちました。神野山駐車場Meade LX-80(GEM-EQモード/ A3S4 Star Patch / One Star アライメント / RA ratio:2.75074479 / RA Percent:60% / PEC Erase後にON)AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 6,400 20s × 15枚オートガイド:なしK3 CCD Tools(シェアウェア)でコンポジットM44(プレセペ星団)って、色の処理が難しいですね。星像も太くなってしまい、ピント合わせも正確にしなきゃダメですね。パーティノフでも試すか?神野山駐車場Meade LX-80(GEM-EQモード/ A3S4 Star Patch / One Star アライメント / RA ratio:2.75074479 / RA Percent:60% / PEC Erase後にON)AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 6,400 30s × 16枚オートガイド:なしK3 CCD Tools(シェアウェア)でコンポジットいったい何が写っているのかというと、M104(ソンブレロ銀河)なのですが、AT6INでは小さすぎますね!次は25cm+バローで狙いたいと思います。神野山駐車場Meade LX-80(GEM-EQモード/ A3S4 Star Patch / One Star アライメント / RA ratio:2.75074479 / RA Percent:60% / PEC Erase後にON)AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 30s × 16枚オートガイド:なしK3 CCD Tools(シェアウェア)でコンポジットおとめ座銀河団ですが、背景とのコントラストが難しいですね。露光時間が全然足りていないです。神野山は、空が良ければ天の川も見えるらしいので、天気が良ければリベンジしてみたい場所です。天頂から南天はかなり良い空だと思います。そして、今回の目的は、Meade LX-80の追尾性能の向上のためRA Percentの最適値を得ることだったのですが、今のところ、RA Percent:60%が良いのではないかと思っています。今後焦点距離が長く、重量級の25cm鏡で再度テストしてみます。
2014.05.06
コメント(8)
-

NexGuideのイメージセンサ!
今頃になって、NexGuideやSynGuiderが新型になっていることに気付きました。イメージセンサーが、APTINA MT9V034C12STM CMOS Sensorに変更され、ピクセルサイズが小さくなり、感度が向上し、露光時間が1/4で良いそうです。海外の望遠鏡ショップを物色しましたが、新型はまだ普及していないみたいです。個人輸入で購入すると、旧型が送られてくるリスクがあります。例えばセカイモンでNew Nexguideと表示されていても、説明をみると旧型だったりします。新型の見分け方はイメージセンサーが、APTINA MT9V034C12STMと表示されています。旧型を持っているのに新型をわざわざ取り寄せるよりも、イメージセンサーの交換のみで済むのではないかと脳裏によぎり少し調べてみました。実はこのイメージセンサーですが、部品単体では、15ドルです。イメージセンサー Old SONY ICX404AL CCD Sensor (DataSheet) New APTINA MT9V034C12STM CMOS Sensor (DataSheet)ここまで書いて、なんだよ!と思われた方がいるかもしれませんが、ドライバICやピンアサインも含めて、APTINA MT9V034C12STMイメージセンサーとSONYのCCDには、全く互換性がありませんでした。イメージセンサの載せ替えは、周辺回路も含め、大がかりになりそうです。残念ながら、新型のNexGuideを購入するのが、物欲を満たす近道の様です。シュミットさんやキョーエイさんで入手できる様です。NexGuide(SynGuider)新旧比較イメージセンサー Old SONY ICX404AL CCD Sensor (DataSheet) New APTINA MT9V034C12STM CMOS Sensor (DataSheet)チップサイズ Old 5.59 mm(X)×4.68 mm(Y) Mew 4.51 mm(X)×2.88 mm(Y)ピクセルサイズ 9.6um × 7.5um 6.0um × 6.0um性能8.5 等星・80mm屈折レンズ・好シーイング下 Old 露出時間 2048ms New 露出時間 500ms
2014.05.05
コメント(2)
-

Meade Autoguider Port Module (APM) #07509 のプチ改造
Meade Autoguider Port Module (APM) #07509 のプチ改造をしました。分解や改造は故障の原因となるばかりでなく、メーカーの一切の保証を受けられなくなります。分解や改造は自己責任で行って下さい。ここで紹介するのは、やってはいけない改造です。なぜなら、私自身がこの改造によりオートガイダー(NexGuide)を破壊した経験があるからです。ですので絶対に真似しないでください。オートガイドやPCによるガイドをしている天文家によく見かける光景ですが、電線ケーブルがグルグル巻きで足にひっかけでもしたらたいへんな思いをする。ですので、電線ケーブルを少しでも減らしたい。一方、ST-4端子の1番ピンはNCピンで余っているので、これを+電源の供給源としたい。以前にも同様の改造を行いましたが、今回は、Meade Autoguider Port Module (APM) #07509に対して行います。まず、オートガイダー(NexGuide)側の基盤でST-4の1番ピンをオートガイダー(NexGuide)の+電源に結線しておく必要があります。詳細は過去の記事を参照ください。NexGuideの耐圧は14Vですので、ST-4端子の1番から流入させる電圧も14Vを超えると壊れます。そして、赤道儀側ですが、今回はMeade LX80のAUX Portの端子の+12Vを利用します。AUX Port上の4番ピンが+12Vです。Meade Autoguider Port Module (APM) #07509 上で、AUXの4番ピン(+12V)とST-4の1番ピン(NC)をジャンパしてプチ改造は終了です。この配線を誤ると、LX80やAudioStar、オートガイダー(NexGuide)が壊れます。これで、NexGuideへの電源コードが不要になりました。
2014.05.04
コメント(4)
-

Meade LX80の恒星追尾精度
この記事ですが、オートガイドによる修正のレスポンス速度を変更しただけなのかもしれません。内容に誤りがある可能性があります。 今回の難点は、恒星追尾精度のことでLX80の赤道儀としての性能を問う内容です。 LX80は、アルミ切り出しのボディーに大型のウォームホイールやバネ圧着式のウォーム機構など牽牛な作りに見え、自動導入の精度も高いといえます。 ところが、恒星追尾精度については、ST-4とAPM経由のオートガイド(恒星速度±0.3から0.5倍)では追い付けないほど、追尾速度が遅すぎることを以前にレポートしました。 上位機種のLX850にはAutomatic Rate Carribration(ARC)と呼ばれる機能があり、全自動のPECトレーニングに引き続きARCが全自動で実行され、追尾速度(初期値33%)の調整が行われる仕組みになっています。 一方LX80はこれらの一連のトレーニングを手動で行う必要があります。 私もPECトレーニングに挑戦しましたが、一度も正確な追尾速度にすることはできませんでした。 手動でボタンを操作すると行き過ぎてしまうこともあるでしょうし、反転を要する場合だってあるでしょう。 この手作業による操作は、LX80の巧みなバックラッシュ制御機構が作動してしまい、うまくトレーニングができない原因であると想像しています。 Cloudy Nightでは、かなり以前よりトラッキング遅延の問題が話題となっていて、AudioStarのSetup→Telescopeで以下のどちらかのパラメータを変更する方法がディスカッションされています。 ・RA ratioをデフォルトの+2.75075から+6.75に変更する方法(Cloudy Night Reged: 10/26/07)。 ・RA percentをデフォルトの10%から50%から55%に変更する方法(Cloudy Night Reged: 09/27/10) なお、Star Patchを導入すると、RA ratioが2.75074479に変更されますが、自動導入がより正確になるものの、追尾速度を修正するには焼け石に水です。この値を大きく変更すると自動導入の精度(ギア比)にも影響がでるので、RA percentを修正する方が現実的です。 不思議なのは、マニュアル上では、RA percentのパラメーターはRA方向のバックラッシュ修正の速度調節の値とされているのですが、追尾速度に関係がある様には思えません。 しかしながら、Cloiudy Nightでは、LX90においてもファームウェアが修正されるまでは、追尾速度調整の有効な手段であったことが、紹介されています。 LX80のRA percent(初期値10%)のパラメータは、本当はバックラッシュ修正速度のパラメーターではなく、LX850では自動修正されるTracking rate(初期値33%)に該当するものであれば、全ての説明はできるのですが、確証はつかめていません、 いずれにせよCloudy Nightでの情報を信じ、私も最適なRA percentを実際に動かしながら探りました。 LX80のパラメーター ・ファームウェアA3S4(Star Patch導入) ・GEM EQモード ・Astronomical ・RA ratio:2.75074479 ・RA Percent:50%から60%の間で可変 ・PEC Erase後にON その他 ・AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当) ・LPS-P2 ・APS-C(NEX-5) ・NexGuide オートガイド(NexGuide)のモニタにてRA-の修正が現れるLX80のRA Percentを50%から順に増加させてみました。 結果 ・50%:オートガイドはRA+のみの修正 ・55%:オートガイドはRA+のみの修正 ・57%:オートガイドはRA+のみの修正が中心だが、RA-の修正が時折入る。 ・60%:オートガイドの修正はあまり入らなくなり、RA+とRA-の修正が時折入る。 RA Percentが60%の時の20分間(30s露光)の動画 フルフレームで動画作成しています。 ガイド鏡台座強度のためかわずかに流れています。 同じ条件でオートガイドなしでの20分間(20s露光)の動画です。 フルフレームで動画作成しています。 以下は、参考のためBin-Starが愛用しているTwinStar CG-5赤道儀のオートガイドなしでの動画です。 ちゃんと調整すれば、LX80は写真撮影でも活躍しそうです。 ですが、調整がたいへんなのと、初心者向けではない赤道儀ですね。 南天の天体を使って、さらに適切なRA Percentを探る必要がありそうです。
2014.05.01
コメント(10)
-

石垣島で南十字星を見たかった。
ブログの久々の更新です。もう3月中旬なのに、あまりにも寒いので、暖かい所に行ってきました。南十字星が見える北緯24度の石垣島です。とは言っても、本州でカノープスを見るのと同じくらい低空の澄み切った条件が必要です。石垣島天文台は昼間だったせいか閉館していました。意外にもコンパクトな作りだったので驚いてしまいました。猪名川天文台と変わらない大きさでした。南十字星は、この日(3月中旬)は、AM2時に南中します。ホテルでは地元のタクシードライバーによる星空ツアーがある様ですが、街の北側にあるバンナ公園近くの展望台に連れて行ってくれるとのことです。バンナ公園近くの展望台は、石垣島の天体観測スポットの様です。ですが、AM2時まで付き合ってくれるタクシードライバーはいないでしょうし、南天の低空を狙いたいので、南側の街越しの撮影となります。不慣れな土地でのレンタカーによるワインディングロードは避けたかったので、街の中心部に近くても南側に開けている場所を探しました。また草むらに住んでいるハブが怖いので、茂みのない場所を探し、見つけた場所が、ココです。日航八重山から車で5分(徒歩で20分)の場所で、建設中で街灯も少ない石垣港の埋め立て地にある公園です。(橋を降りてすぐ左折し突き当りを左折した護岸沿い)残念ながら、滞在した3日間とも満月の上、曇りと水蒸気で、低空の南十字どころか何も撮ることはできませんでした。天体観測以外は、結構楽しめました。生まれて初めて西表島に上陸、もう二度と来れない場所かもしれません。南十字星は見れませんでしたが、思い出に残る旅行でした。
2014.03.19
コメント(6)
-

謹賀新年2014
あけましておめでとうございます。本年もよろしくお願いします。2014年01月01日初日の出浦安市総合公園バス停ロータリー付近APS-C(NEX-5)オートズームレンズ55mm中央部分を拡大トリミング2014年01月01日初日の出(10倍速)浦安市総合公園バス停ロータリー付近APS-C(NEX-5)ビデオカメラオートズームレンズ55mm見事な初日の出でした。今年は、赤道儀がうまく動いて長時間露光がかないます様に!Bin-Star
2014.01.01
コメント(12)
-

潮岬の近くまで遠征
赤道儀の修理のせいで、まともに写真にとれなかったアイソン彗星。崩壊後も球状星団の様に捕えられないかと思い、東に光害のない場所をもとめ、12月7日に5時間かけて、潮岬の近くの、和歌山県串本町紀伊大島まで遠征しました。たどり着いたのは、紀伊大島の一番奥にある樫野灯台口の駐車場。空は全方向開けていて、トイレもある。舗装された広い駐車場で、天体観測には良さそうな場所なのですが、他に天文屋はいませんでした。おいはらってもまたやってくる人懐っこい、たぬきの家族が住んでいて、一晩中5m以内にたぬきがいる状況ですごしました。積み込んだ機材は、自己修理した赤道儀のLX-80と鏡筒は25cmのMeade SCと15cmニュートンのAT6IN。12月7日の夜に到着し、まずは、LX-80に25cm鏡を積んでオートガイドのテスト。Meade Autoguider Port Module (APM) #07509とセレストロンのNexGuideの組み合わせによるオートガイドなのですが、DECキャリブレーション時のエラーにより、今まで、ガイドに成功したことがありません。LX-80の修理で分解した時に、Meade APMによる制御時の動作をモーター軸の直接観察により、以下の結論を得ています。・PECがOFFであるとDECのモーター稼働域に制限がかかり、わずかな回転角でモーターが停止する。これがDECキャリブレーション時のエラーの原因であると強く疑われる。・Star PatchのST-4 Bug Fixをあてると、稼働域の制限はなくなるもののガイドによる制御時にもバックラッシュを打ち消す逆回転動作が入ってしまい、ガイドエラーが出やすいと思われる。(この方が良いのかもしれない。)・オーディオスターのファームウェアA3S4のままPECをONにすると、うまく動作し、バックラッシュを打ち消すモーターの逆回転動作は入らない。そこで今回は、A3S4のままPECをONにしてNexGuideによるガイドを試みました。今回、初めて、キャリブレーションをクリアしてGuidingをスタートさせることに成功しました。Star Lostもなくガイドし続けてくれます。馬頭を狙ってベテルギウスでガイドのテストをしたのですが、家に帰ってからPCモニターで確認して唖然としました。すごく流れているのです。撮影中に気づいてはいたのですが、始終、NexGuideのモニターにRA-(LX-80側からみてRA+)の修正が入っていて、NexGuideのモニターの中心にベテルギウスが来ないまま、追いつかない状態が続き、遅れ気味のガイドでした。明らかにアンダーシュートです。RA+方向の修正が入り続けても追いつかないので、NexGuideのAggressivenessの調整でもカバーできるかもしれませんが、要は、恒星時スピードが不足しているのです。。オーディオスターの設定としては、PEC TrainingをErase後にPEC ONで運転したのですが、これが原因だったのかもしれません。ちゃんとPEC TrainingをしてからPEC ONにしなければいけないのかもしれません。今度やってみます。LX-80の特性が良く判っていないだけかもしれません。そうしているうちに、4時30分ころになり、今の星空の主役のラブジョイ彗星が良い高度になっています。軽量のAT6INの鏡筒に乗せ換えて、撮影を開始。ラブジョイ彗星の明るさに驚きました。双眼鏡でも、淡くですが、確認できるほどです。ISO 12,800ですが、15秒で写ってしまいます。2013/12/08 AM4:52和歌山県串本町 樫野灯台口駐車場Meade LX-80 赤道儀モードAT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 15s × 53枚K3 CCD Tools(シェアウェア)でコンポジットこれを動画にすると、彗星が移動していくのがわかります。大画面でみないと移動しているか判りにくいかもしれません。2013/12/08 AM4:52和歌山県串本町 樫野灯台口駐車場Meade LX-80 赤道儀モードAT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 12,800 15s × 53枚K3 CCD Tools(シェアウェア)で彗星でアラインして、動画を作成さて、今回の遠征の目的はアイソン彗星の残骸を捕えることでした。LX-80を一旦土星でアライン修正してから、アイソン彗星にGOTO。球状星団の様なかけらが写らないかと期待。ステラナビゲータで確認するとアイソン彗星の位置は合っている様です。自宅に帰ってからの、比較明合成の処理で線状に移動天体が写っていれば目的達成なのですが。。。。線状に写ったのは受光素子のノイズだけでした。2013/12/08 AM5:34和歌山県串本町 樫野灯台口駐車場Meade LX-80 赤道儀モードAT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-P2APS-C(NEX-5) ISO 6,400 10s × 53枚K3 CCD Tools(シェアウェア)で比較明合成夜明けとなり、潮岬が近くなので、行ってみた。潮岬の駐車場も、西側を除いてかなり開けていました。ここも。良い観測ポイントになるでしょう。アイソン彗星のかけらを撮影することはできなかったけど、綺麗な星空を満喫できました。LX-80をうまく使いきれず、課題を残しました。帰るのも時間がかかりたいへんでした。以上です。
2013.12.14
コメント(11)
-

Meade LX-80の修理(完了)
すみません。これがLX-80の修理の最終記事になります。(また壊れたら始まるかもしれません。)私のケースでは、LX-80がそもそも壊れたのは、ウォームの圧が強すぎて、モーターが過熱し、樹脂製のギアボックスが変形したことによります。よって、何らかの再発防止策をうたなければ、本当の意味での修理完了とは言えません。そこで、70度でオフとなるバイメタルのサーモスタットをベースとして、超簡単な緊急停止回路を作成しました。部品は、すべて共立電子のネット通販で購入しました。2000円以内だったと思います。70度以上を検知したら、モーターを停止し、ブザーを鳴らしてLEDを光らせることにしました。バイメタルのサーモスタットは、モーターに直接熱伝導テープで貼りつけました。モーターには銅製のヒートシンクを取り付けました。サーモスタット以外は、空中配線で結線し、ブザーの面をRA基板に貼りつけました。空中配線をボンドでコーティングして絶縁しました。LEDはLX-80の化粧パネルの赤いLEDの横につけました。緊急時なのになぜか緑に光ります。さて、3.7kのバランス崩れによるLX-80の破壊実験です。緊急停止装置は作動するでしょうか?うまく動作している様です。本当は、AudioStarにモーターエラーを伝えて対応する方が良いかもしれませんが、AUXポートのプロトコル解析さえまだできていませんので、今後の課題としたいと思います。世間はアイソン彗星の話題で持ち切り、なんとか良い写真がとれないかと思い、星空でのLX-80の修理後のテストを兼ねて、11月23日(土曜日)の深夜に出発し11月24日(日曜日)の未明をねらって、4時間もの大遠征。遠征地は、大台ケ原を超えて、更に熊野街道を南下、水平線の見える海岸で対岸には何もない場所にむかった。たどり着いたのは、御浜町。ここなら、公害もなく、天気予報では快晴なので大きな期待。24日午前5時ころから、アークトゥルス・スピカ・水星・土星と順に自動導入し、アライメントをその度補正、そして、アイソン彗星(Audiostar は彗星に対応している)を導入。場所はあっているはずなのだが、核の様なものが写っているものの、尾もなく緑色でもなく、本当にアイソン彗星なのかは不明。2013/11/24 AM5:46七里御浜AT6IN(ケンコーACクローズアップレンズNo.5;460mm f3.0相当)LPS-V4NEX-5 ISO 6400 1.3s × 1枚アイソン彗星の核を自動導入に成功したということにしておこう。ということで、LX-80の修理後のテストを無事終えました、収穫としては、水平線から上る朝日!わずかに雲が出ていた様です。赤道儀の修理でアイソン彗星の撮影にずいぶん遅れをとってしまいましたが、近日点を過ぎてから本格的に撮影したいなと考えています。以上
2013.11.24
コメント(8)
-

Meade LX-80の修理(その9)
いつまでLX-80を修理してんだといわれそうですが、昨日、ようやくテスト。ギアボックスをアルミに置き換えてるし、エンコーダーディスクパターンは完全に自作品に置き換えているので、星空のもとでテストしたい。とはいっても、自宅ベランダでのテスト。載っているのはAT6IN。ならばLX-80でなくてもいいだろうと思われるかもしれませんが、今回は赤道儀のテストなので、重たい25cm鏡を引っ張り出さずに、AT6INで済ませました。アラインメントも自動導入も問題ない様です。そして、C/2012 S1にGOTO、追尾性能の確認。Audio-Starは、彗星の導入もできるので便利。大阪の街明かりの元、薄明後の時間であるにもかかわらず、ISO 3200 2Sの露光で何か写っているじゃないの。 えっつ。アイソン彗星ってこんなに明るいんだ。スタック処理もしましたが、ゴーストが出ていたので掲載しませんでしたが、すごい尾のながさなんですね。驚きました。これって、一体、何ミリのレンズなら尾の全体がうつるのだろう。目的は赤道儀のテストでした。モーターの温度は19.7度以上に上昇しませんでした。続いて、いよいよ緊急停止装置を組み込みます。まるでFETの様な形状のバイメタルのサーモスタットがあるのですね。70度でオフになるサーモスタットをベースとして、できるだけ簡単な回路とします。続く
2013.11.17
コメント(10)
-

Meade LX-80の誰も知らない優れた設計(その1)
Meade LX-80。優れる点はジズコのWebで確認できる。なので、散々、ダメなところを日記で書いてきた。だが故障を機に分解すると非常に関心させられるところが多くある。ジズコのWebでは書かれていないLX-80の非常に関心させられる設計について触れてみたい。LX-80を使用直後から感じていたのが、設計者が経験をもとに微妙なプログラムをマイコンに仕掛けているものと考えられる。どんな、赤道儀でもバックラッシュが存在し、Syntaやセレストロンのコントローラーなら制御のオンオフ切り替えができるが、LX-80ほど巧妙なバックラッシュ制御の動作をみたことがない。というのも、LX-80のバックラッシュ制御は単純なしかけではなく、コントローラーボタンでの往復、たとえばRAであれば、RA-に引き続きRA+、またはRA+に引き続きRA-の動作を行った場合に限り作動する。動画のモーター軸に注目してほしい。RA+に引き続きRA-の操作を行った場合、モーターはしばらく若干早めに回転しつづけ、恒星追尾速度にはならず、バックラッシュを巻き上げる。同じく、動画のモーター軸に注目してほしい。RA-に引き続きRA+の操作を行った場合、恒星追尾速度で回転するはずのモーターがしばらく停止する。バックラッシュが追いつくまで待たせる仕掛けである。この様にアイピース中央に持ってくる様なコントローラーの操作を行った際に、最大の効果を発揮する様にマイコンがプログラムされている。このことから言えるのは、RA方向でのバランスがしっかりととれていた場合にバックラッシュを打ち消し、逆説的には、RA方向のバランスがいい加減であるとかえってバックラッシュが大きくなってしまうことになる。この様に、LX-80は、経験にもとずく職人技的なプログラム制御であり、性能は良いと言えるが、問題はわざと壊れやすく作ってある(過去記事参照)ので、国内サポートを受けるために正規代理店のジズコからの購入が推められる。私の様に個人輸入すると、修理も自己責任となり、たいへんな思いをする。続く
2013.11.13
コメント(2)
-

Meade LX-80の修理(その8)
Meade LX-80の緊急停止装置を考案している時の最中です。5.1kgのバランス崩れで12分で100度近くに達することは前回報告しましたが、過負荷が電流のモニタで予測できるとの情報をぱなりさんから頂いたので、電流による緊急停止装置を作れないかと、実際に電流を測定している最中の出来事です。動画は50倍速です。(拡大すれば温度計の数字が読めます。)このビデオと同じ実験をしている時に、うかつにもうたた寝。気がつけば、1時間以上経過しています。温度計は2桁までしか測定できませんので、何度にまで達したか判りません。12分で100度近く(室温との差が75度)上昇するので、最悪370度くらいまで上昇していたかもしれません。実際にはこれほどには上昇していないと思いますが、正確には判りません。慌ててウェイトを外し、壊れていないか確認したところ、MAXスピードと恒星追尾速度には問題ない様でした。胸をなでおろしていたところ、Key7(1.5度/sec)とKey8(3度/sec)の高速域の回転が断続的でギクシャクしていることに気付きました。誤って壊しているというレベルではなく、ここまでくればLX-80の破壊実験ですね。再分解して、故障個所を調べました。アルミのモーター台座にしたギアボックスには問題ない様です。MAXスピードで正常回転するのでFETやモーターの故障は考えにくいです。となると、レーザープリンタで自作修理したエンコーダーディスクパターンが熱で溶けたかと思い、禁断のエンコーダーディスク外しを行い確認したところ、エンコーダーディスクが溶けた模様もありません。再度組み上げている最中に原因が判りました。ピニオンとエンコーダーディスク間での滑りが原因でした。おそらく、熱がモーター軸を伝わって、エンコーダーディスクの内筒の中で、ピニオンギアを熱膨張変形したあと、熱収縮し、ズボズボになったのではないかと推測します。まあ、軽傷で良かったです。またもやガチネジで止めました。ガチネジは強度が選べるのですが、中強度を使っていたので助かりました。前回の修理でピニオン軸をガチネジで補強していたため、外すのがたいへんでした。もし強度の強いものを使っていたら、ピニオンを抜くことができなかったかもしれません。この様なLX-80の破壊実験を行って思ったのは、やはり、放熱や緊急停止装置の追加です。ということで、銅製の放熱板を調達しました。それと、緊急停止装置を簡単に組める方法がないかと探したデバイスです。みなさん、この部品が何か判りますか?続く
2013.11.09
コメント(4)
-
Meade LX-80の修理(その7)
LX-80のギアボックスのひとまず修理完了だが、再発予防策をとりたい。まず、ShiroさんのLX-80がピニオンギアの軸滑りだった情報を頂いたので、予防策として、ピニオン軸の強化のため、ガチネジを流し込みました。ガチネジは色がついているので判りやすい。続いて、今回の一連の故障の原因と考えられるモーターの発熱状況をモニターするために、モーターに直接サーモセンサーを貼りつけた。これで、モーターの温度を測定できる。電源投入前のモーターの温度は、23.5度でした。まず、鏡筒もカウンターウェイトも付けづに、無負荷の状態で観察しました。温度は上昇するものの、34度未満の温度で安定していました。動画は50倍速です。(拡大すれば温度計の数字が読めます。)続いて、1.9kgのカウンターウェイトのみ取り付けました。ウェイトシャフトがウェイトを持ち上げる様に負荷がかかります。1.9kgのウェイトであっても、55度未満の温度でプラトーの様です。動画は50倍速です。(拡大すれば温度計の数字が読めます。)続いて、5.1kgのカウンターウェイトのみ取り付けました。このくらいバランスがくずれていてもRA軸は動き続けてくれます。モータートルクが高いのでしょう。ここまで頑張らなくても、緊急停止してくれれば良いのですが、LX-80には、過負荷を検知するプログラムがない、または機能が停止している様です。動画のとおり、温度上昇がすさまじく、12分で100度近くに達します。このまま続けると、恐らく樹脂製のギアボックスが熱変形する温度にまで達するものと思われます。これ以上、続けるとまた壊れそうなのでここで温度測定実験は中止です。動画は50倍速です。(拡大すれば温度計の数字が読めます。)私の場合、何らかの原因で、ウォームとホイールの調整ネジが狂い、モーターに大きな負荷がかかり、モーターの発熱し、樹脂製のギアボックスが熱変形したと考えられます。LX-80を入手した多くの方は、かなり重たい鏡筒を載せることが目的で購入されたのではないでしょうか?今回の実験で判ったのは、バランスはしっかりととっておかないと故障する可能性が非常に高いということです。バランスくずれは2kg程度が限度と思われます。ということで、モーターの放熱をもう少し考える必要がありどうです。続く
2013.11.04
コメント(4)
-
Meade LX-80の修理(その6)
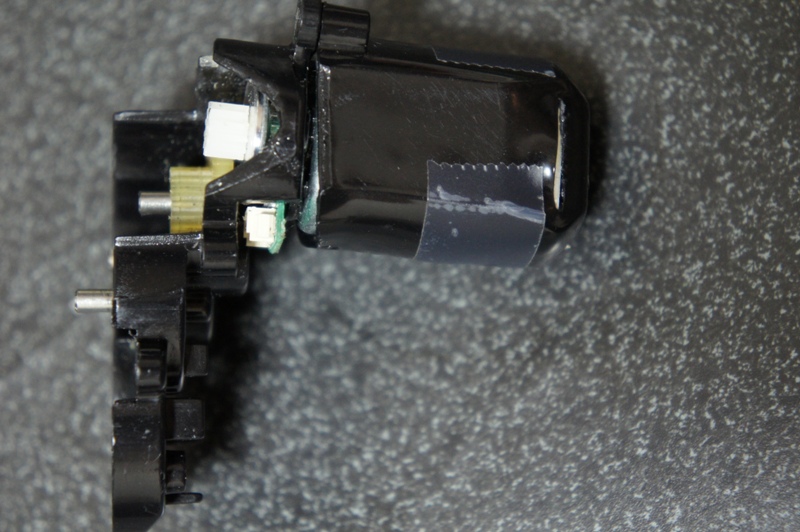
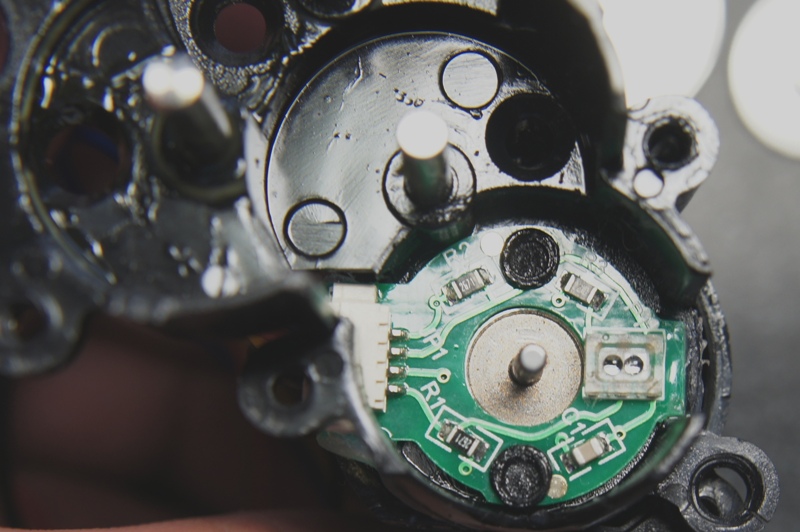
熱で変形した樹脂製のギアボックスを修復したい。ギアボックス全体を金属製にしたいところですが、ギア間隔の調整が面倒なので、次回壊れたら本格的にギアボックスの置き換えを考えることにします。今回は、樹脂製のギアボックスのうちモーター台座の部分を切り落として、金属製に置き換えることにしました。材料は加工のしやすい1.5mm厚のアルミですが、強度も考慮してL型アルミアングルを東急ハンズで調達しました。赤道儀本体のケースと干渉する部分をカットすると、この様な形状になってしまいました。無傷のDECモーターギアケースで型取りして、クイックスチールでの複製も考えましたが、今回の修理では、アルミ台座を樹脂製のギアケースに取り付けるための高さ調整に用いました。ほぼ予定していた修理のイメージどおりにモーター台座部分のみですが、アルミ製への置き換えが完了しました。上:修理イメージ 下:実際の修理後L型なので、強度には問題なさそうです。また放熱板としての機能も期待できます。今回は、ギア鳴りの少ない距離で調整しました。でも解決しなければならないのが、再発予防です。金属製に置き換えたので、次回は樹脂が溶けてのギアボックスの変形はないかわりに、モーター自体が壊れるか、FETに故障が及ぶものと思われます。負荷が小さい場合と大きい場合でモータの温度がどの程度上昇するのかをモニターして、高負荷時にのみ温度上昇するなら、緊急停止回路の増設も検討しなければなりません。続く追記:2013/11/3モターとピニオンの情報モーターの型番からメーカーを探しましたが判りませんでした。モーター軸には滑り止めの加工があります。軸径は2.0mmです。ピニオンは2mmのモーター軸に直接刺さっています。首の様なピニオンギアの下部分は、エンコーダーディスクの刺さる部分で径3.6mmです。
2013.10.30
コメント(14)
-
Meade LX-80の修理(その5)
Meade LX-80の修理中、他の部品をどんどん壊していく。。。。。。自ら壊した部品が、復旧できたのでようやく、モーター軸の調整に入りたい。エンコーダー本体の熱カシメの不可逆的な除去、エンコーダー本体の軸合わせなど課題が山積み。非常に大きなリスクではあるものの、ここまでくればやるしかないでしょ。さてモーター固定ネジが直下にあると思われるエンコーダー本体を外したいのですが、そのために熱カシメを除去しました。ようやくモーターを固定するネジが現れましたが、どうやら調整機構はない様です。これは、どういう事でしょうか?調整機構のない、モーター台座なのに、なぜ軸がずれたのでしょうか?この原因が判らないまま、片方のモーター固定のネジ穴だけをわずかに削って遊びをつくりました。そして歯車を入れてギア間隔を調整後、再度組みたてました。エンコーダー本体はノギスで軸中心にあることを確認しながら、強力な両面テープで固定しました。念のため、DSO-Nano(オシロ)でエンコーダーの位置に問題ないかを確認しました。すべてを組みなおしてから、ベランダでテスト。3スターアライン。。おー完璧じゃん。調整せずともズームアイピース8mmでも視野のほぼ中心に入ってくる。導入も追尾も完璧。どうやら、オリジナルのエンコーダーよりも高性能の様です。修理ではなく、性能アップ改造だったんだ!と自慢のブログ記事になるかなあと思いながら、更に2時間恒星追尾。あれっつ!変だ!また異音がしてRAが動かない。同じ故障が再発した様です。あわてて再分解しました。モーター全体をカバーしている樹脂が変形しています。また、目視で判るくらいモーター軸が傾いています。モーターの熱によって、樹脂製のギアボックスが変形してモーター軸がずれるのです。最初の故障もこれが原因だったと今になってようやく判りました。でもなぜそんなにモーターが発熱するのでしょうか?恒星追尾時はPWM制御ですのでパルスであっても12Vですので回転できないくらい過負荷の場合は、樹脂を溶かすほど発熱するかもしれません。過負荷の原因を調べると、どうもウォームとホイールの圧着させる機構の調整がよくない様です。このバネ式の機構ですが、非常に関心させられます。PEやBacklashを吸収するためでしょう。今まで、この部分は触ったことがありませんが、バネを支える台座がくの字になっていて、圧のかけすぎであることが想像できます。ウォームは、スーパーギアを手回しできる範囲ですが、かなり固めだったので、右側ネジを緩めて調整しました。さてここから、変形した樹脂製のギアボックスをどう修復するかが問題です。いっそうのこと、すべてを金属製にしたいくらいですが、私にはその様な金属加工の技術はありません。写真右は、修復後の想像図です。灰色で塗ったモーター台座部分ですが、黄色で塗った部分だけ高さを調整する必要があります。何かいい素材はないかなあ?熱や油に強くて、加工がしやすく、タップもできて、強固な素材。続く
2013.10.19
コメント(9)
-

Meade LX-80の修理(その4)
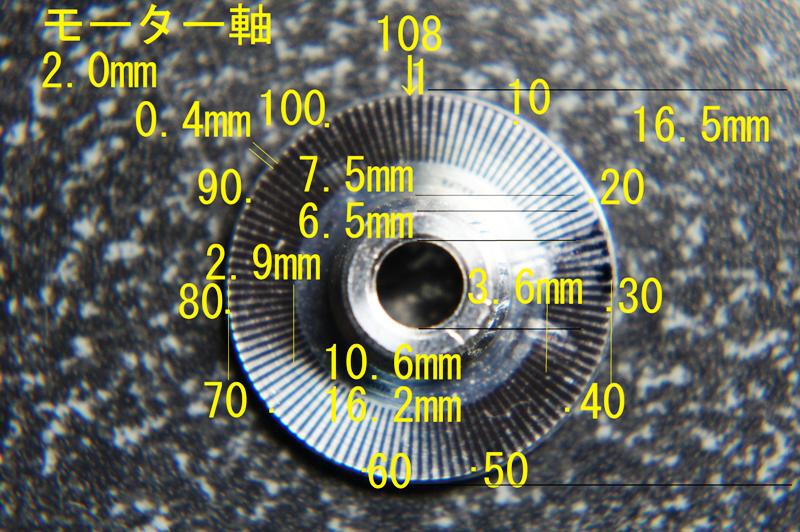
さて、ようやくモーター軸調整にかかれるかと思ったやさき。今度はMotor fault と表示される。満充電の電池をつないでも状況は変わらない。Shiroさんのブログを参考に、回路電圧を測定。今回の故障とは関係ないDEC側の基板のレギュレータの出力が0から2V程度でした。どうやら、DEC基板を架台にぶら下げた状態で通電したため、DEC基板が架台に接触して短絡した模様。完全に不注意による事故です。修理のつもりがどんどん壊しているのです。レギュレータの型番はBCD Semiconductor Manufacturing Limitedの78L05Mで5V 100mAの部品でした。家に転がっていた同スペックのレギュレータNJM78L05 100mA(10個で150円)を代用して取り付けました。Shiroさんの情報では基板のランドやパターンがはげやすいとのことでしたので、部品の除去には、低温ハンダのChipquikを利用しました。幸運にもDEC基板は、レギュレータの交換のみで復旧できました。作業中の短絡事故予防とDECギアのグリス飛びによる基板の故障の予防のため、プラ板で簡易シールドを作成しました。私の様に個人輸入で入手した方で止む無く自己責任による修理を決行されるかたへの推奨です。DEC基板の短絡に注意、作業前にシールドしておくこと!今後の修理の方向性を決める上での情報をいったんここでまとめておきます。大手術になることを想定して、念のための情報収集です。エンコーダー関連1.エンコーダーはUS DigitalのE4P-108-157:モーター軸直結でディスクは108cycles per revolution(CPR)、0.2mm厚で少し固めの透明素材。2400dPI×2400dpiのプリンタがあれば自作も可能ギア関連2.見えない部分のギア、ギアボックスはプラスチック製で将来は、金属製に置き換えたい。ギアのスペック1 ピニオン;12 teeth2 減速ギア:38 teethと16teeth3 減速ギア:38 teethと16teeth4 減速ギア:38 teethと16teeth5 スーパーギア:48 teeth6 ウォームギア:154 teeth (GPシリーズ、CG-5やEQ-5とは異なっているので、ステッピングモーターへ交換する際は要注意)続く
2013.10.18
コメント(2)
-
Meade LX-80の修理(その3)
LX-80を修理中に更に壊してしまったエンコーダー。個人輸入品なので、修理は自己責任です。LX-80の追尾や導入の精度に影響する重要な部品なので、妥協は許されません。その後もエンコーダーディスクの素材を変更して最も反応する素材を探ってみました。比較的厚みのある透明で印刷可能な素材として、コクヨのレーザープリンタ対応OHPシートを利用してみました。厚さは、0.1mmで、透明度は比較的高いと思います。この0.1mmでテストしたところかなりモーターが安定して回ります。候補となるのですが、作業中にわずかでも擦れると印刷パターンがはげてしまいます。そんなこんなで、素材や厚みがさまざまな条件で試しました。結果的には、素材として・コクヨのレーザープリンタ対応OHPシート(0.1mm)・コクヨ透明ラベル(0.07mm)とエーワンの耐水光沢透明フィルム(0.16mm)の重ね貼り=0.23mm厚の2パターンがエンコーダーディスクが安定してモーターが回ることが判りました。なお、これらには、裏側にマイラップ(銀)を反射板として貼っています。印刷面の強度から最終的に・コクヨ透明ラベル(0.07mm)とエーワンの耐水光沢透明フィルム(0.16mm)の重ね貼り=0.23mm厚を選択しました。これが完成品です。試行錯誤しているうちに、オリジナルのエンコーダーディスクのフィルムがポロっとはがれました。厚さは0.2mm、触った感触は少し固めで、どちらかというとOHPシートに近い素材の様な気がしました。ディスクパターンを印刷したコクヨ透明ラベル(0.07mm)とエーワンの耐水光沢透明フィルム(0.16mm)の重ね貼り=0.23mm厚でのテストです。Guide Speedの低速域では、ステップとびはない様です。MAX Speedの高速域でも、エンコーダの信号のパルスは分離されています。なお、エンコーダの出力はコンパレータの出力(写真矢印)とグランド間で測定しました。ようやく、エンコーダ関連は復旧できました。さて、いったい何の修理だったのか判らなくなってきましたが、故障個所は、モーター軸ずれの可能性が高いのでモーター軸を調整することでした。ところが、ここで大きな壁が。モーターを固定しているであろうネジがエンコーダー本体の下にあるらしい。さらにはエンコーダー本体は、熱カシメで固定されている。ということは、カシメを除去する不可逆的な作業を要する。それだけでなく、これだけ小さなエンコーダーなので、中心軸合わせを苦労することになるかもしれない。ここで修理を断念すべきか迷うことになる。こんな難しい修理になるとは。。。。。続く
2013.10.17
コメント(6)
-
DSO-Nanoの復旧
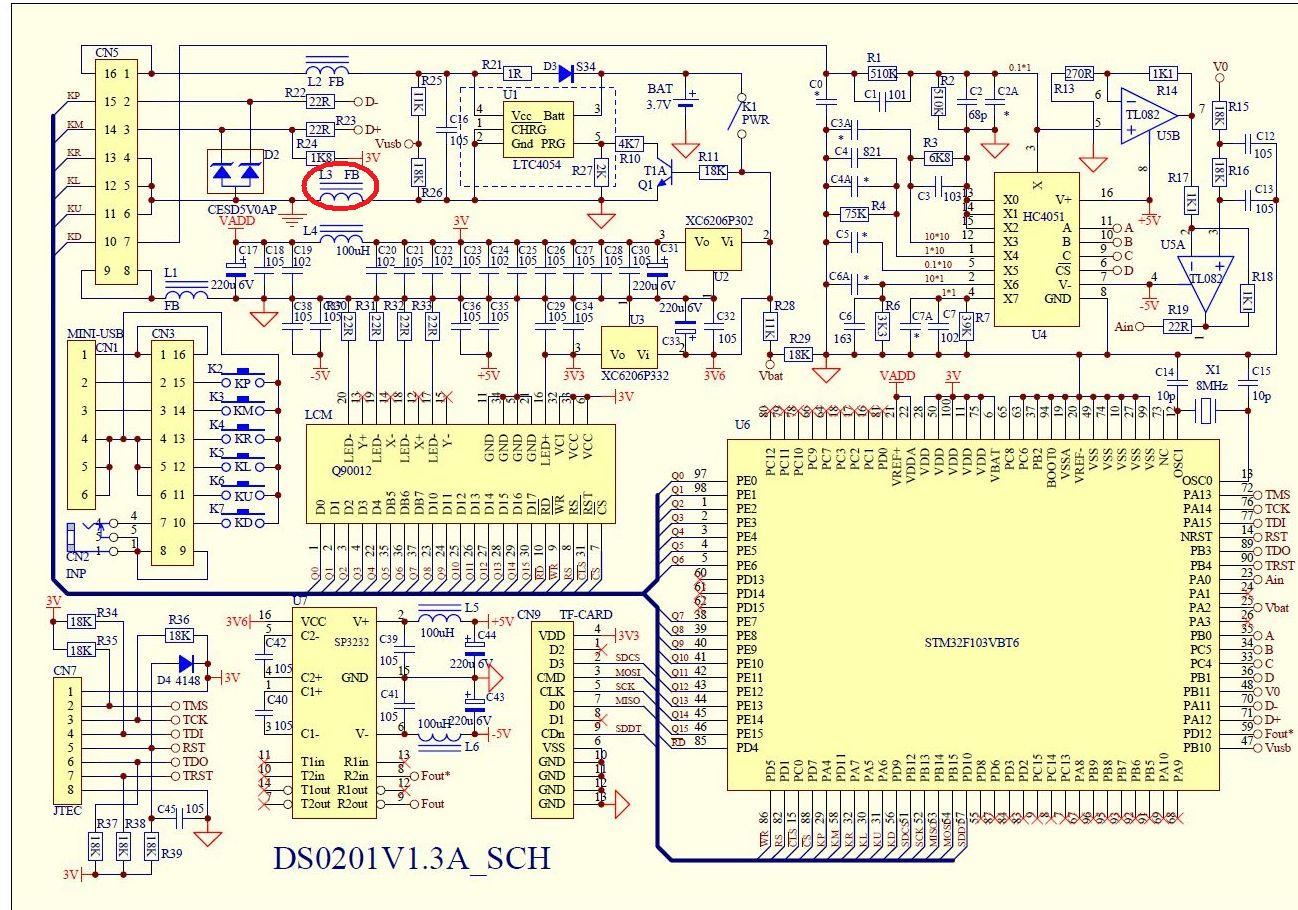
Meade LX-80のエンコーダーの修復にあたって、高速回転時の状況をオシロで確認しておきたい。以前、煙が出て部品が燃えたDSO-Nanoですが、回路図がネット上にあり、焦げた部品が判明しました。回路図上のL3で、インダクタの様です。基板がえぐれるほどの損傷です。インダクタなら、なくても良いかとブリッジしてみましたが、修復できませんでした。こうなると、他の部品が損傷しているに違いありません。もっとも疑われるのは、USBから電池に充電するLTC4054とその周りの部品の損傷です。こうなると互換部品を調達して修理するのですが、面倒なので、先送り、今回は簡易修理としました。USBからの電源、充電池からの電源をすべて断ち、外部電源に変更しました。これでPCと接続はできないですが、スタンドアロンのDSO-Nanoが復旧しました。これでMeade LX-80の修理を進められます。Meade LX-80のエンコーダーの信号をモニタしたところ、DSO-Nanoは正常に動いている様です。
2013.10.12
コメント(2)
-
Meade LX-80の修理(その2)
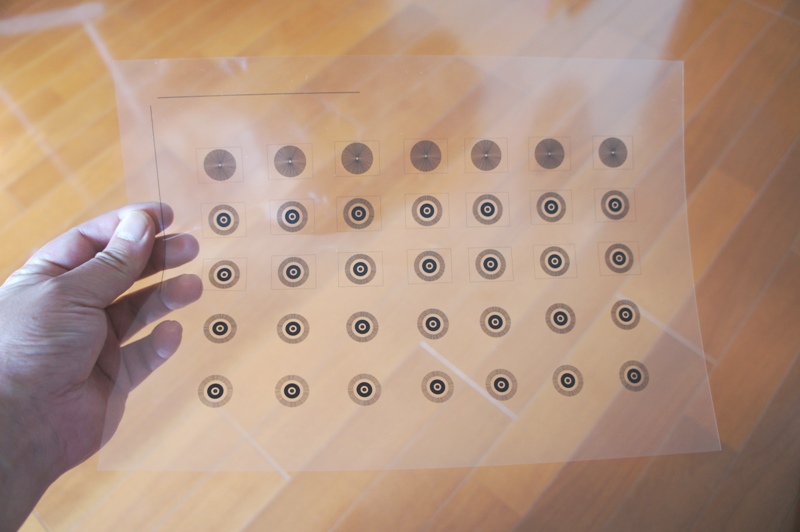
さて、LX-80の修理中に傷つけてしまったエンコーダーのディスク。エンコーダーはモーター追尾の精度を左右する部品なので、これを修復できなければ、他の修理が無意味となるので最優先に修復したい。エンコーダーのディスクの解像度は108cycles per revolution。今後の修復の手順を検討してみました。1:エンコーダーのディスクの製造元を調べ同等品を入手する。2;1がダメなら、エンコーダーのディスクを完全に自作する。 課題として、ディスクのパターンの精度にあう複製をどうやって行うかの検討が必要。3:2がダメなら、手作業による複製可能な一回り大き目のサイズのエンコーダーに置き換える。 課題としては、取り付け方法を検討する必要がある。4:3がダメなら、エンコーダーのディスクの修復を諦めステッピングモーターに置き換える。 課題としては、ステッピングモーターのトルクが足りるのかが疑問。もはやAudioStarではなくMeade製とは言えなくなる可能性が高い。上記の優先順位で作業をすすめたい。1:まず、ネットで同等品の探索を行ってみました。どうやら製造元は、米国のUS Digitalの様で、型番はE4P-108-157 または E4-108-157が該当する部品ですが注文不可になっています。モーターにセットされたE4PはMICROMOのE4P-360シリーズにも108cycles per revolutionの製品はあるがモーターの定格が合わないので、エンコーダーだけ取り出して利用する方法もあるかもしれないのですが、注文方法がわかりません。他の架台では、Meade LX200GPSにもE4 108が利用されている様ですが、cloudynights.comでは、256cycles per revolutionの部品が紹介されています。。この他、Advanced GT、CGE、NexStar-IはAMETEKのPITTMANを使用している様なのですが、256cycles per revolutionで、LX-80のものとは異なります。エンコーダーの情報ではないですが、色々とネットで情報を集めている途中、意外にもLX200GPSがプラスチックギアだと知りました。メタルギアの交換パーツがある様ですがLX-80のモーターギアとは互換性がないでしょう。以上の様に、見つけられても入手できないか、入手できるものは、cycles per revolutionの異なる部品でした。ということで、修理計画の”1:エンコーダーのディスクの製造元を調べ同等品を入手する。”は実行不可でした。次の修理計画”2;1がダメなら、エンコーダーのディスクを完全に自作する”を実行しました。手書きでの修復は困難なので、レーザープリンタ(2400dPI×2400dpi)でのプリントを考えました。まずは、エクセルを用い216行のデータ入力を行い、円グラフで216個の要素を白と黒に交互に塗り分けました。エクセルでは印刷時の大きさが不正確なので、これをパブリッシャーに線がギザギザしない様にOLE貼り付けして加工しました。そしてレーザープリンタ(2400dPI×2400dpi)で、レーザープリンタ対応の写真用光沢紙に出力し、切り抜いてエンコーダーディスクにかぶせました。この状態でテストしましたが、エンコーダーディスクは全く反応しませんでした。そして再度オリジナルのエンコーダーディスクをよく観察すると文字やパターンに影ができています。アルミらしき金属板にエンコーダーのパターンが直接印刷されているのではなく、印刷した透明のフィルムが金属板に張り付けてあることがわかりました。どうやら写真用光沢紙への白黒パターンの印刷ではダメな様です。そこで、印刷可能な透明なものとして、コクヨの透明ラベルに印刷してみました。裏側にアルミテープを貼っています。この状態で再度テストしたところ、ディスクパターンを認識しているものの、カクカクモーターが回ります。うーん。。。このフィルムの厚さとか屈折率なのかなあ?ということで、この0.07mm厚のコクヨの透明ラベルに更に、透明ラベルで厚みをつけるなど色々と試してみました。0.07mm厚コクヨ透明ラベルと0.16mm厚エーワンの耐水光沢透明フィルムの重ね貼り=0.23mm厚0.07mm厚コクヨ透明ラベルと0.3mm厚タミヤ透明プラ板の重ね貼り=0.37mm厚エンコーダーディスクパターンの印刷したフィルムが0.23mm厚や0.37mm厚では低速回転時は問題ない様に見えます。ですが、MAXスピードでモーターが回転した時にカウントしてくれなければ意味がありません。しまった、DSO-Nano(オシロ)が壊れたままです。作業をすすめるには、DSO-Nanoを復旧させなければなりません。先は長い続く
2013.10.12
コメント(4)
-

Meade LX-80の修理(その1)
遠征中にモーターギアの異音とともに壊れたLX-80、修理目的で分解。かなり頑丈そうな構造であり、LX-80を少し見直す機会となった。ギアボックスを開けたところ、外部から見えるウォーム軸のギアは金属製であるが。。。。外から見えないギアは、なんとプラレールの様な樹脂性のギアであった。重厚感とコストセーブのアンバランスさがなんとも言えない。DCモーターを高速回転させるので、ギア鳴りを少なくするためにあえてプラスチックギアを選択したのかもしれないが、真相は不明。そして、ピニオンギアと次のギアの間で滑っていることを確認。目視では、ギア割れやギア欠けの様子はない。となると、モーター軸がずれた可能性が濃厚で、修理はモーター軸を合わせる簡単な作業。。。ではなかった。ピニオンの直下に銀色の円盤と、回路基盤が見える。なるほど、エンコーダーに違いない。これでステップをチェックしているのが容易に想像できる。ということでエンコーダーらしき円盤をはずした。この作業が、さらに修理を困難にしてしまうことになった。エンコーダーのディスクのパターンに傷をつけてしまい、モーター軸、1周のうち2カ所、カクッと飛ぶところができてしまった。驚くことに、LX-80はモーター軸のレベルでなんと108ステップの高密度な制御をおこなっている。ものすごい精度なんだ。。。。高性能な制御とコストセーブのアンバランスさがなんとも言えない。しかし、この細かさは。。。これじゃ手作業でエンコーダーのディスクの修復はできないなあ。。。。続く
2013.10.08
コメント(6)
全221件 (221件中 1-50件目)
-
-

- 動物園&水族館大好き!
- 上野動物園 ハシビロカート
- (2026-05-24 00:00:09)
-
-
-

- フィギュア好き集まれ~
- 【オンライン17時から✨️】待望の「…
- (2026-05-19 16:53:21)
-
-
-

- フォトライフ
- 源氏物語〔34帖 若菜 236〕
- (2026-05-23 10:30:04)
-



