

2014年09月の記事
全5件 (5件中 1-5件目)
1
-
マイクロマウス2014、参加登録しました。
マウスは6年目、トレーサ3年目の機体をほぼ1年ぶりに動かしたら普通に走ったので全国大会の登録をしました。今年も新作を作れないままですが、少しずつ改良してます。マウスの楽しみ方は人それぞれ、ということで。ちなみに昨年度の失敗と修正点。マウス・・・決勝の長い直線で歩数が短かかったためターン時に引っかかってリタイヤ。タイヤが減ってたので再調整すべきでした。トレーサ・・・大径のRと直線の判別ミスで大径Rを直線の速度で走ってコースアウト。ミスを無くすため、曲率だけでなくターンの角度も判断基準に入れるべき。
2014.09.29
コメント(0)
-
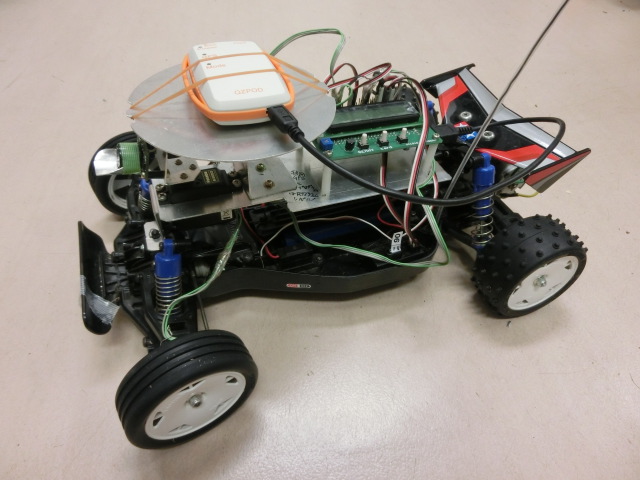
GPS・QZSSロボットカーコンテスト2014、出場予定の車体を改良
以前H8-3694で作ったコントローラをmbedに載せ変え、QZPODを使えるようにしました。これなら速度も申し分ないです。ボードを載せ替えただけで車体に取り付けた超音波センサ、サーボ、エンコーダ、ジャイロ等はそのまま使えるはずなので、あとは動作チェックしてプログラムを組むのみ。
2014.09.26
コメント(0)
-

GPS・QZSSロボットカーコンテスト2014、QZPODの受信方法
以前作ったbuluetooth接続のロボットカーにQZPODを載せれば動く、と思ってまだ何もしてませんでしたが、よく考えたらQZPODとArduinoBTはつながりませんでした。手持ちの品でいろいろためしたら、mbedのUSBHostSerialをGEMMYカードで使ったらQZPODがつながりました。これをラジコンバギーに載せたらハードはOK、です。受信中の画像↓
2014.09.26
コメント(0)
-

ドローン(マルチコプター)の有線給電飛行
先日、マルチコプターの有線給電による飛行が上手くいきました。単に長いケーブルを使えば有線給電で飛ばせるってものじゃありませんで、一工夫必要でした。2通りの給電方法を確かめその一つの動画をアップしました。小形トライコプターで10mの有線給電飛行↓動画→有線給電でマルチコプターを飛ばしました。それから、第22回電子情報通信学会九州支部学生講演会で発表も。
2014.09.22
コメント(0)
-
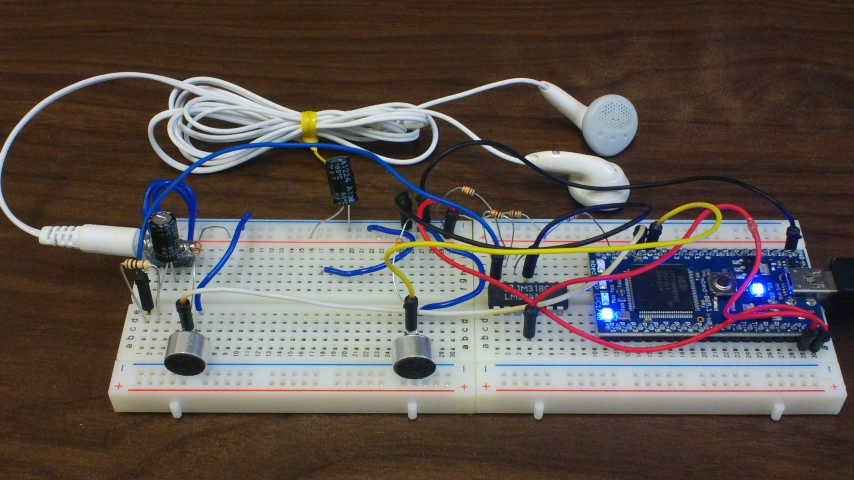
mbedで指向性マイク
最近更新が止まってるので、先日の学会発表のネタ。マイクから音声をA/Dコンバータで取り込んでmbedで処理して、リアルタイムにD/Aコンバータから出力する指向性マイク。オペアンプを通してヘッドフォンで動作確認できるようにしました。学会のプログラムはこちら→電気情報関係学会九州支部連合大会
2014.09.22
コメント(0)
全5件 (5件中 1-5件目)
1
-
-
- しんくぱっど
- 【続】X1 Carbonの電源ボタンが機能…
- (2025-10-19 19:42:00)
-
-
-

- 楽天市場のおすすめ商品
- ✨ 【愛車復活!】魔法の添加剤「FCR…
- (2025-11-26 01:22:08)
-
-
-

- 新製品発売情報・予約情報
- 喜怒哀楽by増田貴久
- (2025-02-14 15:21:13)
-



