

2009年01月の記事
全28件 (28件中 1-28件目)
1
-
DCマウスの速度制御,その4
停止時はコキングの1コキ単位?で制御できるが,静止状態からの始動が不安定.始動時のみ例外処理として回り始めるまでパワーをかけると動作が少し安定になるが,スリップが起こりカウントと歩数が合わなくなる.じわっとパワーをかけて回そうとすると,タイミングが悪ければ1コキ前にパワーが落ちたときモータの逆転が起こってしまう.するとエンコーダが1相なのでカウントがおかしくなる.というわけで,この機体では,始動時のスリップは無視して走り始め,周囲の状態で補正をかけてみるしかなさそう.直進時は壁の切れ目で歩数の補正がかけられるが,90度や180度回転で周囲に壁がないときは補正をかける手段がない場合あり.多少斜めに区画に侵入しても柱を避ける走行でなんとかする手は考えられるが・・・
2009.01.30
コメント(0)
-
DCハーフマウスの速度制御その3
速度制御のプログラムを進めました.1)壁との距離による補正に対応できるように,フラグを立てたら,スピード加減する仕組みを作った.2)加速テーブルに乗ってか減速する仕組みを作った.3)1区画前進をやってみた.走り始めの低速時に不安定,減速して止まる直前もふらつく.走り始めは多分,逆転ブレーキが悪さをしてる.加速時は逆転ブレーキを入れないようにしてみた.1区画前進の動画4)180度回転をやってみた.これも加速始めが不安定.左右の回転の不均等で回転軸がずれる.また角度も一定にならない.180度回転の動画まだまだ作り込まないと基本的な動作もままならない.
2009.01.29
コメント(0)
-
DCマウスの速度制御その2
速度制御のプログラムを進めました.1)モータドライバの発熱がやたらと大きかったので原因を探ったら,オンと短絡を繰り返した制御をやってたけどブレーキ時の電流が大きくドライバに負担をかけていたことが判明.(バイポーラで損失大きい)オンと開放にすると発熱が気にならなくなった.2)目標スピードに追従してPWMのパルス幅をPI制御するようなプログラムを作成.早すぎたら逆転ブレーキもいれた.3)左右の回転数から速度を補正するプログラムを作ってみた.ある程度スピードを上げたら直進性は良くなる.でも低速でのコキコキはどうしょうもない.一定速度で前進交代の繰り返し(左右補正あり)の動画4)目標速度を歩数に合わせて加減速させ,速度に追従させるプログラム(左右補正なし)を作ってみた.目標スピードに追従させた加減速走行(左右調整なし)の動画DCモータの制御はやってみないとわからないことが多い.この程度動いただけでもうれしい.でも低速のコキコキは,ソフト的な補正に限度がありそう.DCモータ制御を学ぶために作ったので,労力を惜しまず思いついた手段を試してみる.ソフトを作り込み,スラローム探索で速度を落とさずに走ればゴールできなくもないだろう.
2009.01.28
コメント(0)
-
DCマウスの速度制御をやってみました.
低速で速度制御(左右独立)をやってみました.まだPWMの制御がちゃんとできてない(ON-OFFに近い)のでカクカクですが,考え方は間違ってないようです.あとはいかに滑らかに動かせるか・・・低速で走行中速で走行
2009.01.24
コメント(0)
-

KIROBOでロボスプリント(Robo SprinT)
学校の授業で,ロボスプリント競技を取り入れ,KIROBOでやってみました.本当のルールは2個同時スタートで競争するのですが,40名のクラスで競争すると時間を取るので,タイムトライヤルにしました.KIROBOの高速でも制御よくトレースしてます.KIROBOでロボスプリントの動画【エレキット】[MR-9132] KIROBO(キロボ) 入荷しました。測定器・工具のイーデンキ
2009.01.24
コメント(0)
-
DCマウスの速度制御の考え方
速度はエンコーダのパルス数/時間だけど,速度レンジが広いと,低速時はパルスが1カウントあたりにどれだけ時間がかかったかを測る,高速時は1カウントの時間分解能が極端に低くなるので,数カウント分の時間計測,ということがPWMの分解能をしきい値として連続的にできるような手順を考えて,エンコーダのパルスとそのパルス数にかかった時間の両方をPWMの計算に使えば良いようだ.エンコーダ選定失敗した.手持ちのエンコーダは減速して使うつもりで100パルス/回転だけど,車輪に直結で作ったから分解能がちょっと足りないようだ.けれど,コキングのあるモーターだからコキングの幅の中にカウントがあってもしょうがないし,結局ソフト的に制御を頑張るしかない.
2009.01.24
コメント(0)
-

トランジスタ技術2月号
昨夜,帰りがけにトランジスタ技術2月号を買いました.「はじめてのアナログ回路の考え方」の特集です.トランジスタ技術 (Transistor Gijutsu) 2009年 02月号 [雑誌]
2009.01.24
コメント(0)
-

欲しいけどかえないもの.
CNC-miniを以前に買いました.大は小を兼ねるといいますが,小は大(中?)を兼ねないですね.ホーザンからコンパクトなフライスが出てますが,もうお金がなくて買えません...HOZAN(ホーザン) 卓上フライス盤 K-280あと,全方位カメラも欲しかったけど,これが結構高いです.いい感じの曲線のものを磨いてめっきして自分でミラーを作ってみるか,と思っちゃうような値段です.まるまる!全方位カメラシステムIEEE全方位カメラ:SOIOS-55Cam(S01CAP01)
2009.01.23
コメント(1)
-
今日は部品探し
表面実装用のチップ部品がまったくないので,今日は部品探しをしてました.それから,ミニッツのパーツをWebで見てました.近くにラジコン屋がなく,パーツを手に取ってみれないので,全然イメージわきません.あと,ハイパワーなモータードライバユニットも探しました.40Aくらい流せるやつ.マウスのほうは,速度制御のプログラムのイメージがつかめてきた感じです.速度を求めて使うんじゃなくて速度の逆数を引き渡すと整数で処理できそう.
2009.01.22
コメント(0)
-
前進とバックの繰り返し
ブレーキが利かないので強制的に止める方法として,逆回転を入れたらどうなるかを試してみました.乱暴ですが,前加減速しながら前進とバックを繰り返してみました.速度をモニタしながら制御すれば止められそうです.前進とバックの繰り返し動画
2009.01.21
コメント(0)
-
数式と計算は大の苦手です.
マウスの情報をいろいろ探してみると,今からやろうとしていることが何年も前にちゃんと数式と実験と結果とグラフと動画で説明されていたりしてます.(でも数式と計算が大の苦手で,式は飛ばし読み)ページは知っていたのですが以前斜め読みしただけで,今読み返してみると,昨年苦労していろいろ考えたことがちゃんと書いてあるし,これからやるべきことが書いてあります.答えを知りたい方はこちらの2002年ごろの日記(直リンク失礼します)↓Kouhei's Homepageというわけで自分のブログの資料的価値は殆どないのですが,自分の記録として恥ずかしげもなく公開してます.あえて意味づけすれば,設計も製作も行き当たりばったりで,失敗をどうどうと公開する,極力数式を使わず,感覚的にプログラム組んでみて動けばOKで,凝り性だけど飽きっぽいのでえいやっと作ってみるマウスのページ.(速度も加速度も計算してません,ギヤ比やタイヤの径もできたとこです)
2009.01.21
コメント(0)
-
プログラム移植
H8とステッピングモータで作ったマイクロマウスのプログラムをSH2のDCマウスに移植中.ステッピングモータと同様な制御をするとすれば,大部分は同じで良さそうです.モータ制御部分が難関ですね.じっくり作らないと難しいです.ステップモータと同様にタイマーで加速テーブルを使ってジワッと加減速した動画です.でもやっぱりモータショートによるブレーキだけでは止まらないので,逆回転による強制ブレーキをかけないとだめなようです.でも,エンコーダが回転方向を読んでくれないので制御はかなり大変そう.ジワッと加減速した動画
2009.01.20
コメント(0)
-
DCマウスの直進性について
安定しないのは重心位置の影響もあるかもしれません.通常のバッテリー位置(後ろ重心)の動画ためしにバッテリーを前の方に乗せてみた動画 後ろ重心でないほうが直進してます.解決策としては,バッテリーを小さくする位しかありません.簡単なプログラムで左右の制御を入れてみました.低速で左右の補正制御を入れた動画あるスピードでは,制御が利いて直進性が良くなってます.ちゃんと制御を入れれば走行中の直進性は何とかなりそう.問題は安定した停止ができるかどうか?
2009.01.19
コメント(1)
-
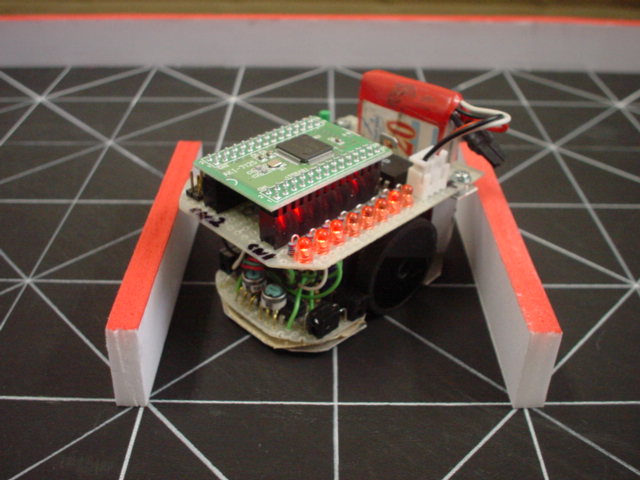
DCハーフサイズマウスonユニバーサル基板,ハード完成
各部分の基本的な動作は確認を終えてくみ上げました.といっても,両面テープでつけてますが.重量は120g(電池減量予定),車幅42mm.制御できれば斜め走行可能な幅.左右独立にエンコーダのカウントだけ見てモータを回してみたところ,直進性は悪いです.プログラムでどこまで制御できるものでしょうか・・・低速の動画(少し左に曲がります)中速の動画(惰性で大きく左にそれます)高速の動画(スリップ)
2009.01.19
コメント(0)
-
DCハーフマウスのモータの動作チェック
続いて,DCハーフマウスのモータの動作チェック.タクトスイッチを押すと右または左のモータが回ります.たぶん,maxの1/2位のパワーで回って,スイッチを押すとフリー(ブレーキではない)になってます.フリーで回ってるときカリカリ言ってます.大丈夫でしょうか・・・SH-2を使うのは初めてなので,もうちょっと細かいところまで確認できたら接着剤で固定します.モータチェック中の動画
2009.01.16
コメント(0)
-
DCハーフマウスのエンコーダの動作チェック
続いて,DCハーフマウスのエンコーダの動作チェック.タイヤを回すとカウントダウンします.どっち方向に回してもカウントダウンのみです.安い方のエンコーダを買ったのでしょうがないです.ソフトがんばります.エンコーダチェック中の動画
2009.01.16
コメント(0)
-
DCハーフマウスのセンサの動作チェック
DCハーフマウスのセンサの動作チェック.上手く動いているようです.でも実はちょっと問題があります.これまでセンサ周りの動作速度はあまり気にしてなかったのですが,赤外LEDを点灯して15us以上待たないとA/Dに信号が来ないことが判明.どこがボトルネックかはこれから調べるとして・・・もうちょっと速くないとマウスの高速化に支障がでそうな感じです.センサチェック中の動画
2009.01.16
コメント(2)
-

KIROBOでロボスプリント
昨年から1年生にKIROBOを使ったプログラミング演習を行っています.昨年はライントレースでしたが,今年はロボスプリントのコースがあるので,ロボスプリントをやってみます.簡単そうでも早く走るには意外と奥が深そう.調整風景はこんな感じ↓--追記--動画を追加しました.なぜかゴールの終わりまで行って止まります.キロボでロボスプリントの動画
2009.01.16
コメント(0)
-
MZ汚染度
あなたは 153.45%MZに汚染されています。と出た.あなたのMZ汚染度チェック↓http://www5d.biglobe.ne.jp/~object/BASICは改造することは当たり前でした.WICSとかなつかしいですね.その昔,中学校の近くにキャリーラボがありました.
2009.01.15
コメント(3)
-
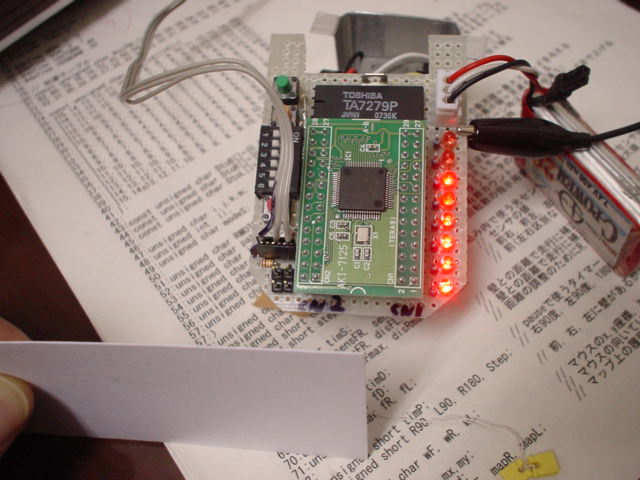
DCハーフサイズマウスonユニバーサル基板,ハードをチェック中
こんな感じで機体の製作はほぼ完成↓ネジ止めの穴を開けるスペースがなかったので,最終的にはホットボンドで基板を固定します.その前にハードウェアのチェック.配線は問題なさそうですが,センサやモータの動作を確認しているところです.書き込み用ケーブルの製作↓秋月のSH7125 Base-BoardからGND,RXD,TXDを取り出して書き込み.モニタ用LEDの点滅を確認できました.
2009.01.14
コメント(0)
-
Googleブック検索
Googleブック検索というのがあるのを知りませんでした.試しに検索してみると,こんな感じ↓「作って学ぶCPU設計入門」の検索結果本の3割くらいスキャンして公開されてしまってますが,これってどうなんでしょう?Webページによると出版社から許可を取っているとありますが,日本では著作権は著者にあるわけで,米国の法律的に問題なくても,日本の法律的には問題あると思いますが・・・(なお,この書き込みで参照される書籍の著者(著作権者)には了解を取っております,ってか.)
2009.01.14
コメント(0)
-
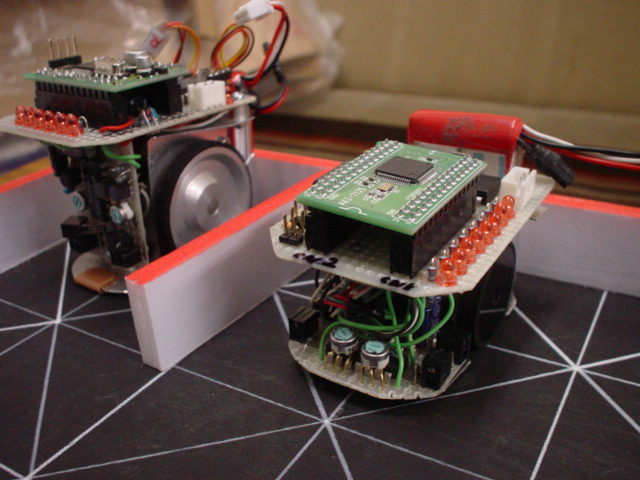
DCハーフサイズマウスonユニバーサル基板,進捗状況
昨日も夕方から製作の続き.だいぶ形が見えてきました↓ あと2-3日とれればハードは完成しそうです.以前作ったステッピングモータによるハーフサイズマイクロマウスとの比較.重心も低く,重量も100gちょっとで約半分.(バッテリーも半分容量のものを購入予定)
2009.01.10
コメント(0)
-

DIP-SWの断面構造
マウスの基板のスペース的な問題で,ディップスイッチを6ビット用にカットしました.綺麗な断面が見えたので記念写真です↓
2009.01.10
コメント(0)
-

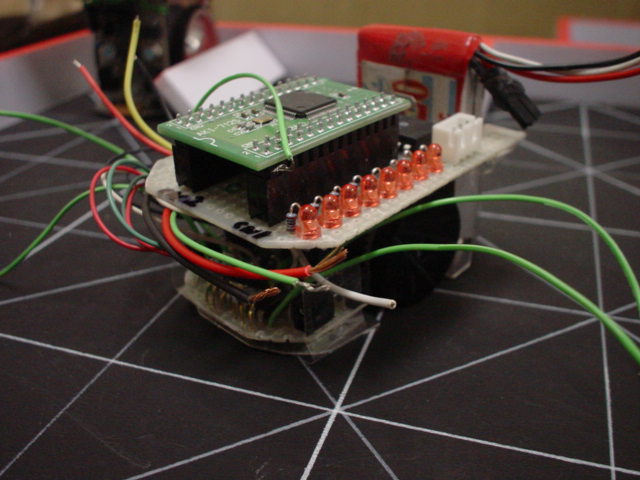
DCハーフマウスonユニバーサル基板
つくばチャレンジにむけてカメラ入力と画像処理に関してなんとなくイメージができたので,一安心してまたDCハーフマウスonユニバーサル基板の製作続行.今日は夕方からCPUボードの部品配置を決めて半田付けを始めたところまで↓(DIP-SWとLEDはいつもより多め)
2009.01.08
コメント(1)
-
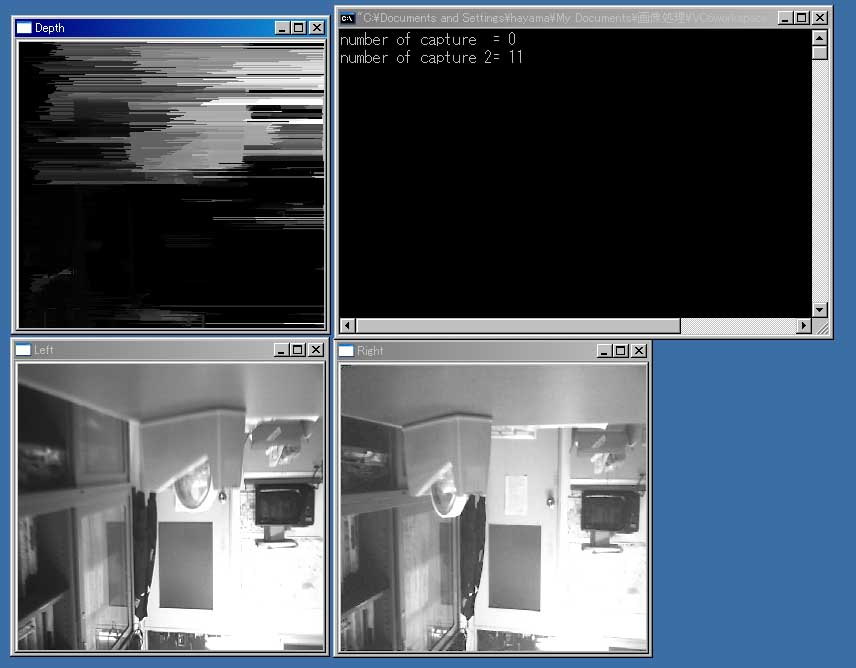
USBカメラ2台の画像で距離マップ作成
USBカメラ2台の画像を取り込み,OpenCVのサンプルを使って,距離マップを作成して表示してみました.あまり綺麗な画像ではないですが,近くに置いたものだけ認識しました.カメラをきっちり位置あわせして,パラメータの調整をしないといけないようです.完全な距離マップは自分には必要ないので今日はここまで.OpenCV(シーヴィ)プログラミングブック
2009.01.06
コメント(0)
-
openCVでプログラム.
ちょっとプログラムを組んでみました.USBカメラ2台を接続してそれぞれから画像を取り込んで表示させてみたり...ライブラリの一部が動かなかったりで昨夜遅くまでやってて寝不足気味です.
2009.01.06
コメント(0)
-
正月は・・・
2-4日は嫁さんの実家で本と紙と鉛筆でお勉強してました.
2009.01.04
コメント(0)
-
新年あけましておめでとうございます.
子供も寝静まったし,いまからお勉強します.
2009.01.01
コメント(0)
全28件 (28件中 1-28件目)
1






