

2012年01月の記事
全17件 (17件中 1-17件目)
1
-

次のトレンドは
これとこれとこれで表面実装らしいです↓ブックマーク↓http://?trac.switch-science.com/?wiki/HomeReflowKithttp://trac.switch-science.com/wiki/EagleCraftRobo上手くいったらレポートします。-追記-ちょっとやってみました。まず、EAGLE6からデフォルトで入ってるdxf.ulpでdxfを出力して、ROBOMasterに読みこもうとしてもだめ。スイッチサイエンスのページから読み込んだcream-dxf.ulpで出力してROMOMasterに読みこもうとしても止まってしまいます。すんなりいかない。そこで、VectorからDXFビューワー(Dxvj32)というアプリをダウンロード。表示させてみると、0で割り算しているというエラーメッセージを吐き、多分エラー回避できた分だけ表示しています。なので、dxf.ulpもcream-dxf.ulpも何か問題ありで、自分の環境では上手く行きませんでした。そこで、dxfでなく他の方法を探す。EAGLEでパッドのみを表示させた状態で、exportでモノクロ画像として出力する。eagleは.pngしか出力できない。ROBOmasterはpng,tifは読めなかったので、画像アプリ他の形式、jpg,bmpなどに変換。ROBOMasterへ、挿入->ファイル読み込みで読み込み。選択状態で、アウトライン抽出を行うと、別ウィンドウが開きアウトライン抽出できる。アウトライン変換ご貼りつけて終了すると、robomaster側に切り出しパターンができる。シートをセットして切り出し。最初、普通紙を使ってみた。角で引っかかって紙が破けたり、毛羽立ったりする。次にOHPシートを使ってみた。シートが厚くて完全に切れない。刃先は0.1mm,0,2mm試したがどちらもだめ。OHPシートより薄いシートを探しだして試したら上手く切れた。使ったのは、以前買っていた、ALPS熱転写プリンタ用のOHPシート。79μmの薄さです。写真は最小1.25mmピッチくらい↓サンハヤト SMX用特殊クリームハンダ SMX-H05
2012.01.30
コメント(0)
-

トイカメラで3D?
安かったのでこんなのを買いました。画素数は多いですが、画質はピンホールカメラなみ。5分くらいでこんな物を作って、動画撮影して見ました。Free 3D Video Maker というソフトで合成してアナグリフ動画化。結果は・・・そう簡単に上手くはいきませんでした。撮影開始のタイミングがずれます。合わせるのが大変です。(ソフトである程度は合わせられます)左右の向きが合いません。’(使ったソフトでは合わせられません)ケースをぴったりあわせても、中のカメラデバイスがズレてます。USB接続端子が横の同じ位置についていて、ケーブルを挿すのに干渉してしまうので、読みだすには一旦外してしまうか、外さない場合は左右の視差をかなり広げないといけません。3Dを取るには、微調してガチっと固めてしまわないといけないようです。何度かやったそれっぽい動画がとれはしたのですが・・・-追記-こちらのサイト↓でステレオムービーメーカーというソフトを公開されています。http://stereo.jpn.org/jpn/index.html動画に対応するcodecを入手しないといけませんが使い勝手は良いです。フレームや位置の微調整ができます。でも結構な作業と時間がかかるので、3D撮りたかったら素直に3Dデジカメ買うべきですね↓【送料無料】ソニーモバイルHDスナップカメラ“Bloggie 3D”MHS-FS3 [MHSFS3]◆02◆
2012.01.27
コメント(0)
-

HAKKOのヒーティングガン
買いました。やっぱり本物は違います。こちらの動画をどうぞ。ヒーティングガンでプラ板が貫通します。広告↓白光 HAKKO ヒートガン ヒーティングガン ホットガン 白光 ヒーティングガン 883-13ヒーティングガン 883-13
2012.01.27
コメント(0)
-
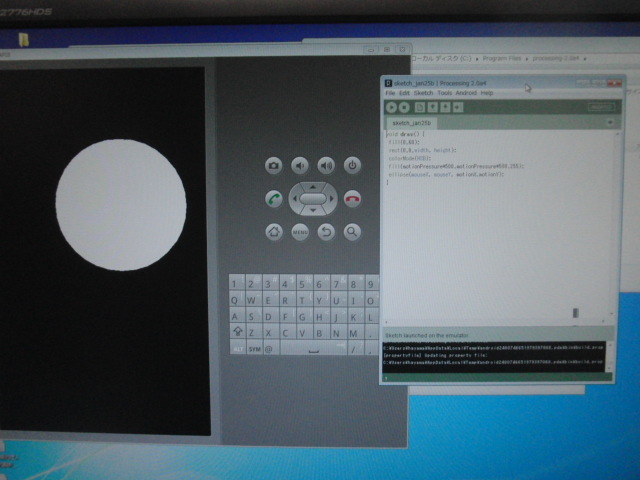
ProcessingでAndroidアプリ作成
先日の続き、参考URL↓http://research.preferred.jp/2010/12/processing-on-android/ AndoridのSDKをイストール。Android2.2とAPI8をいれた。とりあえずAPI8でエミュレータを起動。その後、Processing1.5.1からアプリを起動しようとしたらできない。バージョンを変えてみて、最新の2.0a4をインストールしたら起動できた。サンプルプログラムはここ↓http://wiki.processing.org/w/Androidマウスでクリックしてドラッグすると円がぐりぐり動く。プログラムを書き換えて再度実行すると、接続でたりできなかったり不安定。できないことの方が多い。できなくなったら、processingもエミュレータも落として、再起動すると接続できた。その動画ー>ProcessingでAndroidアプリ次は、実機でテスト。HTC001HTを接続してみた。まず、HTC sync で検索してドライバをインストール。実機はUSBデバックON。接続すると何でつなぐか聞いてくるので、HTC syncにした。でも、Windows側でHTCsyncが立ち上がってるとPCとandroidが同期を取ろうとしてじゃまするので、PCのHTC syncは起動しない状態にしておく。そこで、Processing2.0a4からAndroidモードでRun on device を実行。するとコンパイル後にdeviceを探しに行って、接続、アプリをインストール実行してくれる。プログラムをちょっと変えて再度実行すると、変えたアプリが動き出した。こっちのほうが接続は安定してる。テストは以上。あとは、どんなことができるかよく調べて、何かアプリを作ってみましょうー>自分。-追記-Processingのsampleを試してみたら、こんなのが簡単にできました。太陽に顔です↓
2012.01.25
コメント(0)
-

PCを変えてProcessingの新しいバージョンをインストールしてみたら・・・
見慣れないボタンが有りました。Android Mode って書いてあります。切り替えようとしてみたら、AndroidSDKがないって怒られました。SDKをインストールしながらネットで検索したらありました。こんな感じで、Androidのアプリが作れるそうです↓http://research.preferred.jp/2010/12/processing-on-android/でもまだ、ダウンロード中…【送料無料選択可!】Processingプログラミング入門 Javaベースのオープンソース統合開発環境 (単行本・ムック) / 田原淳一郎/著
2012.01.23
コメント(0)
-
トライコプター(Tricopter)練習中。
飛行機の場合は進行方向に対してどう舵を当てるかというのを体が覚えてますが、ヘリの場合は勝手が違いますね。テイルローターのところが弱く、回転を上げる途中で共振するポイントがありかなり振動します。金属疲労を起こしていたようで、操作を間違えてぶつけた拍子に壊れました。部品を作り直して、同じことが起こらないように補強。それから、いまのままだと、テイルの荷重が小さく、前2つのローターに荷重がかかりすぎているので、均等に近くするため普通に正三角形近くに直そうと思います。(前のローターは逆ピッチのまま)
2012.01.17
コメント(2)
-

微弱無線モジュールを大人買い
仕事に使う、微弱無線モジュールを大人買い。本当はテストしてからにしたかったのですが、年度末なので見切り発車。何に使うかはできてからまた書きます。買ったのこれ↓http://strawberry-linux.com/catalog/items?code=82003http://strawberry-linux.com/catalog/items?code=82004
2012.01.17
コメント(0)
-
トライコプター(Tricopter)に足つけた。
配線して足つけたらこんな感じ。ー追記ー勤務時間が終わってから調整再開。7.4Vではフル充電でぎりぎり浮くくらいだったので、11.1Vに交換したら余裕のパワー。でも重心位置が変わってエレベータのミキシングの調整が変わって面倒。やっぱり正三角形じゃないのは面倒かも…。ちょっと浮きすぐ下ろしを繰り返して少しずつ安定してきた。でもまだまだ飛んだとはいえない状態。
2012.01.16
コメント(0)
-
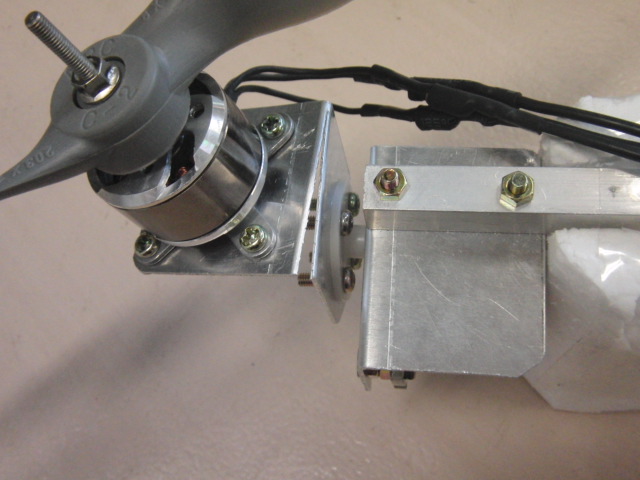
トライコプター(Tricopter)調整中
トライコプターの接続と送信機のミキシングのかけ方とジャイロの方向の基本形はできた。前二つのローターはお互い逆ピッチになるようにした。左前ローターをスロットル、右前ローターをエルロン、後ろローターをエレベータ、サーボをラダーに接続した。スロットル→エルロン 100%近くから調整、スロットル→エレベータ 100% 近くから調整、エルロン→スロットル 100% でロール軸、ジャイロはそれぞれのローターの動きを補償する方向に取り付けて感度調整、後ろローターだけの反トルクはそう強くないようで、ヨー軸はラダーのトリムでわずかに傾けるだけでよかった。これもジャイロで傾きに補正を入れた。エレベータとラダーのミキシングをどのくらい入れるかは飛ばしてみないとわからない。不要かもしれない。畳の上で調整して、ほんのわずか浮くくらいにはなりました。バッテリー切れでいったん終了。剛性が足りないのとローターのバランスが悪いので結構振動があり、ジャイロの誤動作もちょっと心配・・・やっぱり後ろのサーボはちゃんと軸を作ってから取り付けたほうがよさそうです。特にここがブルブルしてます。
2012.01.14
コメント(0)
-

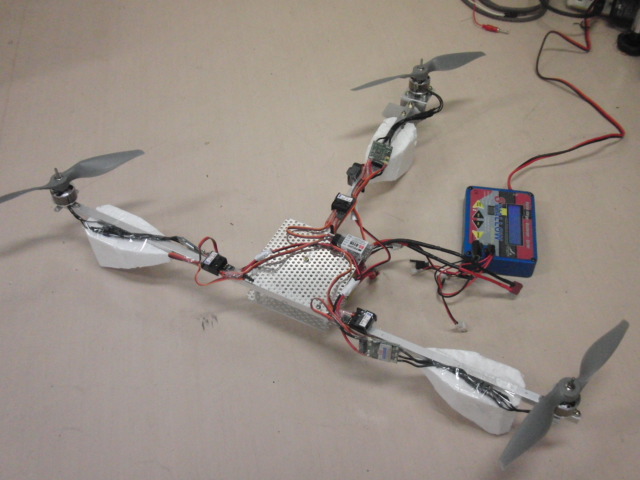
トライコプター(Tricopter)は正三角形である必要はないはず…
トライコプターはほぼ正三角形で皆さん作られているようですが、前後わからなくなるし、後ろが原理的に非対称になるので、正三角形に作る意味は多分見ためと調整のし易さなんだろうなぁ、と思って、どうせならはっきり前後ろわかってお手軽な形に作ってみました。飛行機しかまともに飛ばしたことない(ヘリはシミュレータとトイラジだけ)自分には、この方が素直な気がします。空撮やるにもどうせ前しか写さないし。製作時間はここまで3時間。ほとんど目分量、現物あわせで急ぎの工作。これから仕事が忙しくなるのであんまり時間がかけられません。あとは、配線とサーボのミキシングをどうかけるかをぼちぼちやれば飛ぶか、それとも落として壊すかも。完成後の重量は600g弱くらい。後ろはこんな感じ↓ 中型のプラサーボに直結なので、落としたら一発で壊れます、多分。参考URLhttp://rcexplorer.se/projects/TriV2/TriV2.htmlhttp://rcexplorer.se/projects/tricopter/tricopter.htmlhttp://www.blueskyrc.com/index.php?main_page=product_info&products_id=16AR.Drone(エイアール・ドローン)【直送品・代引不可】
2012.01.12
コメント(0)
-
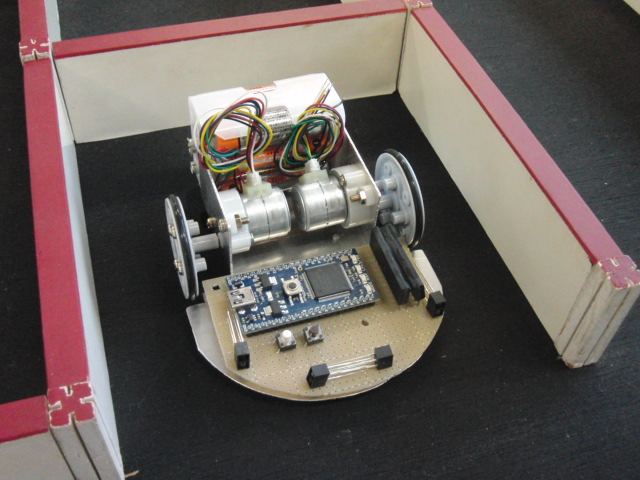
mbedでマイクロマウス構想
気になったので前に作った教材用のマイクロマウスのベースを使って、ユニバーサル基板を切り出して部品を載せてみた。寸法的には問題なさそうです。急ぎの仕事に目処がついたら製作に取り掛かります。
2012.01.11
コメント(0)
-

ホットプレートに関する一番の関心は肉を焼くことではなく・・・
ホットプレートに関する一番の関心は肉を焼くことではなく半田がうまく溶けるかどうか。嫁さんが不満を漏らす肉が焦げ付つくホットプレートを買い換えるという条件で、電子工作ように転用することにしました。オープンキャンパスにお越しの中学生が裏表間違えて半田付けしてしまった基板。ピン数が多いので半田吸取り器ではなかなか外せません。最高温度に暖めたホットプレートで5分くらい焼きますと・・・半田が溶けて、ピンセットでこねれば外せるようになります。この時、ふたは全開にせずなるべく熱が逃げないようにしたほうが良いでしょう。マイコンが生きてるかどうかは不明ですが。お肉も焼けるホットプレート↓【送料無料!】両面焼き遠赤外線パックグリルKS-2587いつでもあつあつ保温調理。焼き上がった料理をそのまま保温。
2012.01.11
コメント(0)
-
mbedでマイクロマウス作った方いませんか?
センサとモータをつければお手軽にマイクロマウスを作ってみたりできそうなんですけど、Googleでmbed マイクロマウスmbed micromousembed のページのcodeでmicromouseで検索してみたけど、マイクロマウスを作って動かしてる人を見つけきれませんでした。時間ができたらmbedの勉強もかねて、マイクロマウスを作ってみる、かも? です。
2012.01.10
コメント(0)
-
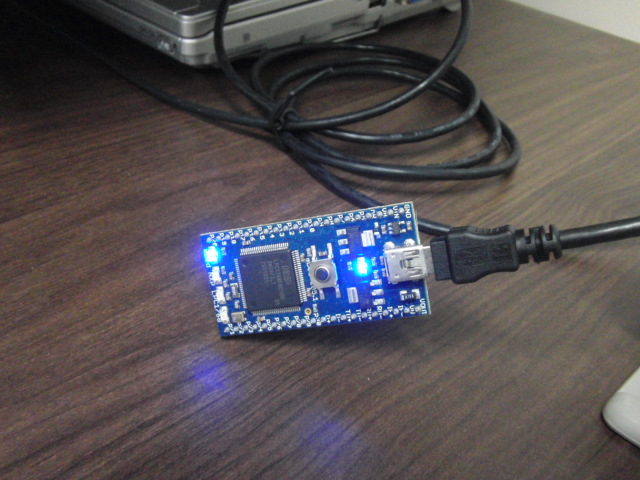
mbedを早速動かしてみたら、LEDがピカピカしました。
1)USBケーブルで接続。2)mbedがフォルダとして見えたので、その中のURLを開く。3)アカウント作成4)ダウンロードってあったのでプログラムをダウンロードしたら.binファイルがダウンロードできた。5)これをどう使うかわからなかったので英語を読むとどうやらさっき見えたフォルダにコピーしてリセットすればいいらしい。6)コピーしてリセットしたらLEDがピカピカしだした。 その時の写真↓7)プログラムを自分でつくるには、mbedのページの右上のほうのCompilerをクリックすると開発環境が開く。8)そこでNewで新規プログラム作成。デフォルトでLEDピカピカのプログラムがmain.cppに入ってた。Compileを押してコンパイルしてみると、.binファイルのダウンロードをいってきたので、PCにダウンロードした。これをさっきのmbedのフォルダにコピーしようとしたら、さっきのファイルもあるので、前のを消して、新しいのをコピーしてリセットしたらやっぱりLEDピカピカする。9)LEDの点滅時間を変えてコンパイルしなおしてダウンロードしてコピーして、点滅時間が変わることを確かめた。10)ファイルが複数個フォルダ内にあってもよさそうだったので、古いファイルを消さずに新しいファイルをコピーしてリセットかけたら新しい方が認識された。11)きっとそういうことなんだろうと思ったけど、Googleで検索かけたら日本語でちゃんと説明されてるページを見つけた。新しいファイルが認識されますって書いてあった↓http://mbed.org/users/nxpfan/notebook/lets_get_started_jp/12)このページに書いてあった、”4. プログラムを少し改造してみる”のプログラムをコピペしてコンパイルして、ダウンロードしてファイルをまたmbedにコピーして、”半導体屋の観点からは,あまりおすすめ出来る方法ではありません”というpin20を指で触ってみたら、触ってる間LEDが点灯した。そのほか関連URLをブックマーク↓http://mbed.org/users/okano/notebook/langja-personal-memo-usb%E3%82%B7%E3%83%AA%E3%82%A2%E3%83%AB%E5%85%A5%E5%87%BA%E5%8A%9B/http://www.nxp-lpc.com/cgi-bin/linkv.html#cat7-追記-mbedのURLのComplier以外のページも見てみた。Blog | Forum | Handbook | Cookbook | Code | My Home | My Notebook | Compilerとあるので、MyHomeを見ると、さっきアカウントを作るときにいれた名前(本名)でMyHomeができてた。職種上、名前と所属は既に公開情報なので、ついでに学校の場所までGoogle地図で入れてみた。そのMyHome内に、Profile Activity Notebook Programs Librariesとあり、どうやら自分の作ったプログラムやライブラリがここに公開できるらしい。いろいろとよくできてますね。-さらに追記-これだけスペックあれば、Quadcopterも楽チンだろうなぁと思ってQuadcopterでcodeを検索してみたら、やっぱりやってる人いるみたい↓http://mbed.org/users/cr0n0s20/programs/quadcopter/ln1nk9面白そうですね。
2012.01.10
コメント(0)
-

mbed NXP LPC1768
買っちゃいました。使ってみたら何か書きます。【送料無料】超お手軽マイコンmbed入門【送料無料選択可!】mbed/ARM活用事例 世界で利用の広まる組み込みマイコンを理解するために (マイコン活用シリーズ) (単行本・ムック) / エレキジャック編集部/編
2012.01.10
コメント(1)
-

ブックマーク、UHF対応RFID技術入門
図書館に行ってRFIDの本を探したらあまり新しいのがなくて、ネット探したらこんな本が最近でたらしいのでブックマーク。【送料無料選択可!】UHF対応RFID技術入門 周波数は世界の標準帯域へ (単行本・ムック) / 伊賀武/著 苅部浩/著
2012.01.06
コメント(0)
-
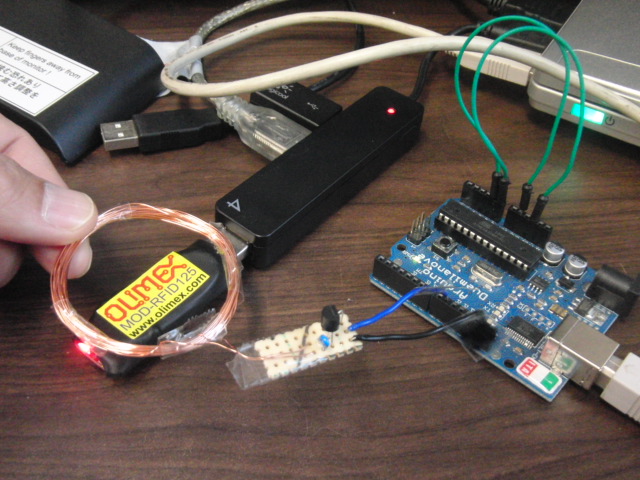
RFIDをArduinoで動的(アクティブ)に使う
125kHz RFID というと、カードの固定IDを非接触で読み取るような静的?な使い方が主ですが、前に書いたようにArduinoを使ってRFIDをエミュレートできます。年明けの初プログラミングで、Arduinoのアナログ入力で読み取った値をコード化して、非接触でRFIDリーダーで読み取るプログラムを作ってみました。動作確認中↓読み取り結果↓最初の3桁がアナログ0ポートの入力値、いま5Vにつないでいますので3FF。次の3桁がアナログ1ポートの入力値、いまGNDにつないでいますので000。次の4桁は固定コードで1234をいれておきました。【送料無料】RFIDの現状と今後の動向
2012.01.05
コメント(0)
全17件 (17件中 1-17件目)
1
-
-

- 新生活にむけてほしい家電は?
- 176
- (2025-11-14 13:24:44)
-
-
-

- 花、風景の写真を撮るカメラとレンズ
- ★ヤフオクでSONYデジカメを落札、同機種4…
- (2025-10-04 17:30:05)
-
-
-

- いいもの見つけたよ
- ブラックフライデーで買うべきノート…
- (2025-11-22 17:34:42)
-



