

2013年01月の記事
全17件 (17件中 1-17件目)
1
-

ハンドランチグライダーの修理
最近へんな飛びモノばっかり作ってるけど,上手く飛ばないとストレスがたまる.ここは初心に帰ってハンドランチグライダーを飛ばして癒されようと思って,壊れたまんま(学生さんに飛ばさせたら壊されたまんま)のグライダーの修理に取り掛かった.主翼両端が折れてたので,フィルムを剥がしてバルサやら檜棒やらで補強↓フィルムを貼り直して出来上がり.飛ばさなくなってずいぶん(約10年前)なるのでフィルム貼るのが下手になってました.しわしわです.
2013.01.30
コメント(0)
-
マイナー更新
私をロボットや制御が専門と勘違いしている人が学内でいるようなので,トップページの本を並べ変えてみました.学位のテーマは半導体関連材料の結晶成長です.私に制御理論や数式を聞いても分かりません...
2013.01.30
コメント(0)
-

焼けたコアレスモーターを分解してみた.
定格の倍の電圧で負荷をかけてぶん回したために焼けて回らなくなったコアレスモータを分解してみた.これ↓コイルが断線しているわけではなくて,ブラシが加熱してブラシ台が変形した結果,コミュテータにまともに当たってなかった.コミュテータもかなり摩耗していた.試しにブラシを曲げてコミュテータに当たるようにして組み立ててみたらモータが回ったが,かなり振動して熱くなり,電流もすごい.変なふうにブラシが当たってるみたいだ.参考URLhttp://micro.citizen.co.jp/01products/gm/tec/corelessmotor.htmlこれに使われているモーター↓【Joshin webはネット通販1位(アフターサービスランキング)/日経ビジネス誌2012】EPマイクロ R/C ミニュームプレーン フライベビー(ブルー) 機体セット 【税込】 京商 [K 10653BLフライベビ]【返品種別B】【送料無料】
2013.01.29
コメント(0)
-
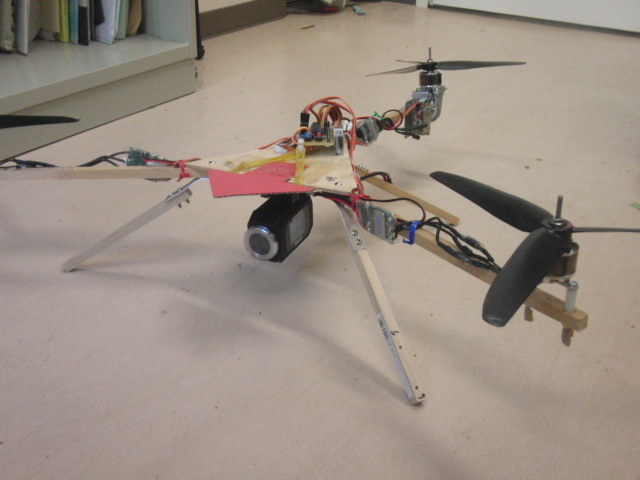
トライコプターにカメラアタッチメントつけた
広角のスポーツカムを買ったのでトライコプターに取り付けるアタッチメントを細工した.こんな感じ↓実は100均のミニ三脚の足をもぎってネジ止めしたもの.部品代105円でできた↓買ったのはこれ↓【送料無料】 JVCケンウッド ADIXXION GC-XA1 (5m防水/デジタル5倍ズーム/Wi-Fi機能/アクションカム) 【ラッピング(有料)対象商品:カメラ】
2013.01.28
コメント(0)
-

QuadCopter 飛んだ
コントローラを自作してたQuadCopterですがなかなか満足行く安定性が得られないので試しにArduCopterのAPMを買ってみました.組立調整は学生のYくん.モーターとアンプの相性の問題等あってちょっと時間がかかったのですが,自作の苦労と較べるとあっさりと飛びました.さすがです.その動画→ QuadCopter飛んだ
2013.01.24
コメント(0)
-
マイクロマウス2012大会レポート
大会レポートが出されています.決勝進出のロボットの写真も掲載されていて良いです.http://www.ntf.or.jp/mouse/micromouse2012/report/2012report.htmlロボトレース競技のレポートの最後に,ショートカットにトライしたことを載せて頂いていました.ありがとうございます.今回のコースではその効果がほとんどなかったですが3回め走行のタイムがほんの少し短くなっていたので,どこかでショートカットしてたとおもいます.http://www.ntf.or.jp/mouse/micromouse2012/report/2012RT/2012rt.html次回は動画が掲載されるようにがんばります.
2013.01.24
コメント(0)
-
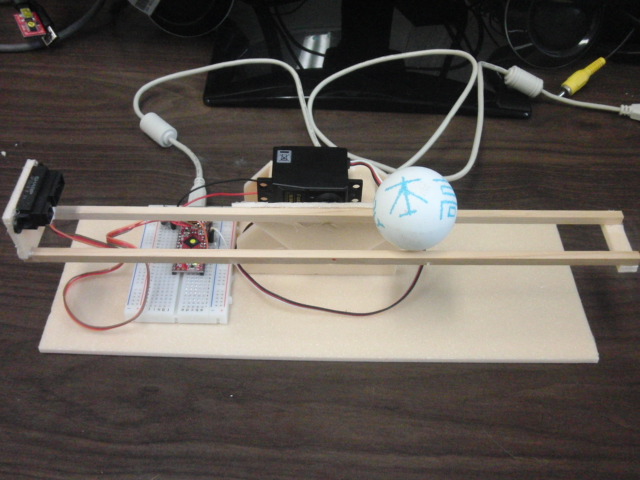
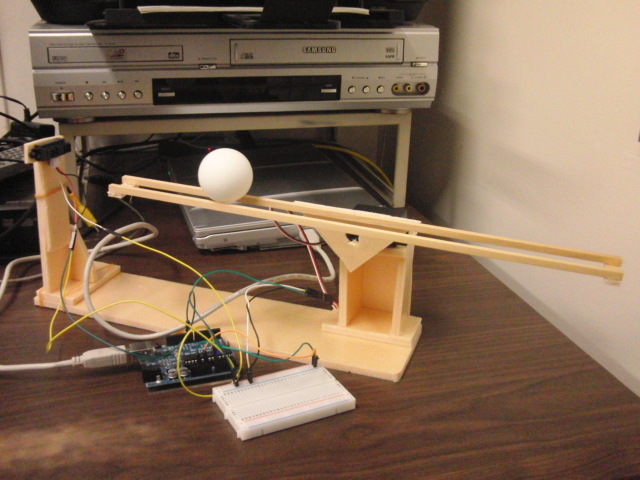
ボール&ビーム制御実験装置Ver2,更にシンプルにしてみた.
前に書いた記事より更にシンプルにボール&ビーム制御実験装置を作ってみた.ダビンチと測距センサとサーボを組み合わせただけ,1000円弱の安価なサーボを使えば全部で3500円くらいの材料費でできます.欠点は,測距センサから10cm以内に近づくと出力が落ちるので,制御可能な範囲はあまり広くないくらい.でもちゃんと制御をかけてさえいれば,20cmの範囲があれば外乱を加えてもピンポン玉が落ちることはありません.完成写真↓裏から↓その動画→ ボール&ビーム制御実験装置その2
2013.01.23
コメント(0)
-
トライブレードコプター(仮称)の軽量化
なるべくモータが焼けないように,翼端の角を落として肉厚を薄くして低抵抗と軽量化.搭載部品もコネクタではなくて半田で直結してケーブルを3本減らして軽量化.バッテリーも半分の容量に交換.基板もやめてマイコンの足に直付で回路をつくろうかと悩むところ.いま約150g,2割は軽量化できたのでモータの負荷も減ったかな.
2013.01.21
コメント(0)
-
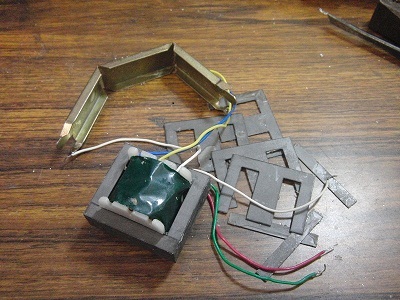
手持ちのトランスをちょっと改造するとそこそこ強力な電磁石が作れます.
小型トランスをばらして鉄芯を組み替えればそこそこ強力な電磁石になります.鉄芯はE型の薄板(方向性電磁鋼板?など)を交互に重ね合わせてあります↓やっと全部バラせました↓これを向きを合わせて組み換えて挿入↓1次側,2次側で巻数が異なります.同じ電圧でも流れる電流が違います.磁力はおおよそ電流×巻数なので,使う電圧で一番強い磁力を作れる端子を使選べます.例えば,片方は5Vで0.3A,もう一方では3Vで4Aになり,こちらの方が磁力が断然強くなります.電池駆動でも自重を持ち上げられる磁力がありそうです.ペンチにくっつけてみたところ↓その動画→ 手持ちのトランスでそこそこ強力な電磁石を作った
2013.01.18
コメント(0)
-
モータ焼けた...
トライブレードコプターの電源には,マイコンの電源電圧や手持ちのアンプの関係で,7.4VのLipoを使ってたのですが,案の定モータが焼けてしまいました.本来は3.7Vのモータで定格の倍の電圧をかけて,電流も1A以上流していたので時間の問題だったのですが結構早く焼けてしまいました.でもこの機体構成で安定性に関する実験をあとちょっとしたいので,数個モータを買い足して飛ばしてみることにします.モーターを消耗品みたいに焼きながら使うのは気がひけますが,安価で手頃なギヤダウンユニットがなかなか見つからないので.あとは,構成部品と機体を出来るだけ軽量化して負荷を減らすくらい.
2013.01.17
コメント(0)
-
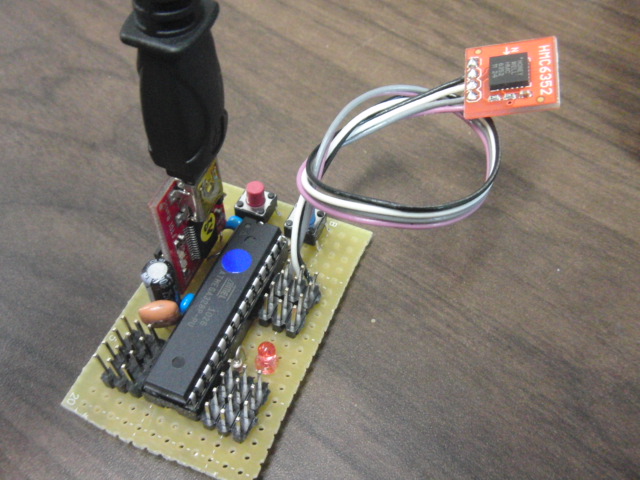
ArduinoによるRC飛行機コントロール基板をまた作った.
昨日の飛行体のコントロール用の基板が完成.重さは約15g.Arduinoのブートローダーが乗ったATmega328Pを使って,I2Cとシリアル通信,受信機4ch,サーボ4ch,アナログ入力4ポート,スイッチ入力,リセット,表示用LED1個が乗ってます.このパターンで作っておくと,お手軽にRC機器をマイコン制御できるので,同様なものを何個も作ってます.基板を外注しておいてもいいのかな.写真は書き込みとコンパス受信テスト,20Hzで方位をシリアル通信で送ってきてます↓広告↓【送料無料選択可!】Arduino+Bluetooth Androidプログラミング サブボード「シールド」で機能強化! 小型マイコンにつないだ外部アクセサリをスマホで制御 (I/O) (単行本・ムック) / 丸石康/著 鈴木圭介/著 仲見川勝人/著 IO編集部/編集
2013.01.16
コメント(0)
-
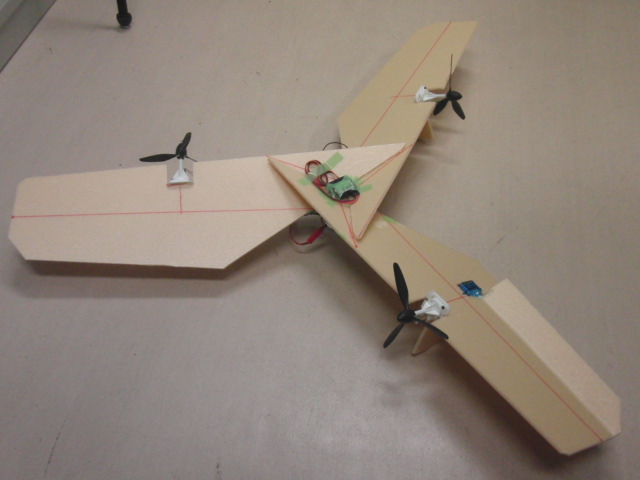
今まで無かったかもしれない形のトライコプター(自称,トライブレイドコプター)
ちょっと変わった飛行体を作ってみました.モノコプター(Monocopter),バイコプター(Bicopber 例えば,BladeStar)などありますが,このように3ロータを回して自転しながら飛ぶトライコプターはネットを検索しても見当たらなかったので作ってみました.自称,トライブレイドコプター( TriBladeCopter ).既に誰かが作って名前をつけてたら教えて下さい.今後は浮くだけでなくて,地磁気センサを使って方位を検出しながら横方向の操縦ができるようしてみます.こんな形にした利点は,翼面積をかせぎ,十分な浮力を得て,安定性も高くなるように,自転スピードがあまり速くならないようにして操縦の応答性を余裕をもたせられないかと思ってです.この回転速度なら普通のサーボのレスポンスで十分に操縦できると思います.動画はこちら,トライブレイドコプター--追記--高度が低いと地面効果で安定しているのですが,1mくらい上げるとふらつきがはじまります.尾翼の1つにサーボとジャイロを加えてみると安定性が増しました.写真も改良したものと入れ替えてあります.
2013.01.15
コメント(0)
-
HITEC-Cのバージョンが上がってPICのコンパイルできなくなった・・・
昨年にPCを変えてからしばらくPICを使ってなかったのですが,今日使ってみたら古いソースを元に書き換えたプログラムのコンパイルが通りません.Webをめぐってみたら,ヘッダーファイル内の定義がいくつか変わっているようです.C:\Program Files\HI-TECH Software\PICC\9.80\include\の中の使用するPICの定義を探して書きなおせばコンパイルは通るようになりました.例えば, TRIS1 -> TRISIO1 など.新しいほうが分かりやすい定義にはなっているのですが,古いソースが動かないといちいち書き換えるのが面倒なので古いコンパイラを探してインストールしなおしました.ここから探した↓http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en023073古いバージョンと新しいバージョンが混在した状態ですが,ビルドオプションで指定すると古いバージョンでコンパイルできるようです.Project -> build Options -> project を選ぶDrivers から使用するコンパイラのバージョンの優先度を変える.新しいPICを使いたい時は,新しいバージョンに合わせて書き直した方が良いと思いますが,古いPICを手っ取り早く使いたい時はこれでOK.
2013.01.13
コメント(0)
-
ボール&ビーム制御実験装置を簡単に作ってみた,完成
昨日の続き.ピタっと止まるようにプログラム組みました.やったのは,タイマー割り込みを使ってPSDセンサの計測周期を制御周期と独立にしてスムージングによるノイズ除去.センサ値の線形化パラメータの最適化.ピタっと止まってしまって面白く無いので,2通りの位置で10秒毎に切り替えるようにして動きを出しました.その動画→ その4(2点の交互移動)改良したスケッチもフリーページにまとめます.こちら→ ボール&ビーム制御実験
2013.01.10
コメント(0)
-
ボール&ビーム制御実験装置を簡単に作ってみた.
オブジェに飾っておくのに面白いものが簡単にできないか考えて,SI2012で見たものを更に簡単にして作ってみました.ボール&ビームというのは制御分野ではメジャーな例題らしいですが,自分は専門外なので知りませんでした.作ったのはこれ↓Arduinoでサーボを制御,測距センサでピンポン玉との距離を計測,身近にあったスチロール板を適当にホットボンドでくっつけて工作.センサの高さと距離は輪ゴムで固定しているので可変できます.本体製作時間は1時間半くらい,以下の動画のプログラムも含めて3-4時間で出来ました.動画その1(ON-OFF制御)動画その2(比例制御)動画その3(比例と微分制御)完全に安定しないのは,測距センサの値がふらつくためです.完全に安定するとボールが止まってしまって面白く無いので,あえてそのままにしています.測距センサの計測周期に合わせて別周期で計測とスムージングした値を使うと多分もっと安定すると思います.----------途中だけど,スケッチはこんな感じ----------#include < Servo.h> const int analogInPin = A0; int servoCenter = 85; int sensorValue = 0; int posCenter=256;float p=0, pp=0, i=0, d=0, pid=0;Servo myservo; void setup() { myservo.attach(9); myservo.write(servoCenter); delay(1000);} void loop() { sensorValue = analogRead(analogInPin; pp=p; p=-(sensorValue-posCenter); i+=p; // I制御は使ってません d=p-pp; pid=p*0.04+i*0+d*0.04; // I制御は使ってません(係数0) myservo.write(servoCenter+pid); delay(200); }
2013.01.09
コメント(0)
-

卓球のラバーを貼り替えました
最近,facebookで中学時代の卓球部の恩師とのやり取りがありまして,体力づくりで時々球を打ってますって話をしたら,試合があるよ,と言われ,もし試合にでることになってもそこそこは勝てるようになっとかないとと思って古くなってたラバーを貼り替えました.前のラバーと張り替えた後のラケット↓ラバーは初心者用の最低価格のもの.若者とパワー勝負をしてもしょうがないので,コントロール重視で,できるだけ軽くて取り回しのよいラケットとラバーにしました.昔と較べて今の若者はパワー重視なので,つないでると自滅してくれる場合も多いのです.本題はラバーの切れ端について,ロボットのタイヤの素材にいいんじゃないかと思います.競技ルールで粘着性のタイヤはダメとなってますが,安いラバーは特に粘着剤が入ってるわけではなく,質の良い合成ゴム素材だし,スポンジが柔らかいものは接触面積も大きくなるし.卓球を頑張るとラバーの交換頻度も高くなり,タイヤ素材も増えるのでまさに一石二鳥.買ったのはこれ↓バタフライ Butterfly フレクストラ Flextra 05210【 卓球ラバー 裏ソフト 】【RCP】ちなみに高粘着ラバーはこんなのがあります↓【23%OFF☆お買い得ポイント10倍】バタフライ(Butterfly) スピンアート 05870
2013.01.09
コメント(0)
-
SI2012のスタンプラリー当選
SI2012のスタンプラリーでソーラーモバイルチャージャーが当選しました.ありがとうございます!結構良さそう↓【FS-305】 ソーラーモバイル充電器 SOLAR MOBILE CHARGER (FS305)
2013.01.07
コメント(0)
全17件 (17件中 1-17件目)
1
-
-

- 新製品発売情報・予約情報
- 5/16発売!6枚2980円で予約できると…
- (2026-05-08 12:04:39)
-
-
-

- iPhone
- 2026 ワイヤレス充電 多摩電子工業
- (2026-05-23 02:04:35)
-
-
-

- Amazonマケプレ
- #タイムセール ロッテ コアラのマー…
- (2026-04-30 12:18:55)
-



