

2013年02月の記事
全24件 (24件中 1-24件目)
1
-

今日の教材製作は板金加工.
ODGW先生のご注文の品,来週使うために急ピッチでアルミの板金加工.まず寸法通り切り分け.穴あけして…曲げて仕上げ.全部で16セット,製作時間は5時間.疲れた.
2013.02.28
コメント(0)
-
実験教材作製中
頭がつかれた時は,単純作業.(学内で)ご注文を受けていた制御工学の基礎実験用のボール&ビームを製作中.何か作ってると無心になれて心が癒されます.(15セット位ならばですけど)-追記-ホットボンドの匂いが不快になってきたので,今日はこのくらいにしておく.-追記2-15セット完成してO先生に納品.次は別の教材を16セット,アルミの板金...
2013.02.26
コメント(0)
-

LSM303,傾き補償付きデジタルコンパス,加速度センサモジュール
飛行体の姿勢制御に使おうと思って,こんな感じで実験中.4軸分の出力を場合分けしてATANとって足したり引いたりして頭がこんがらがりそうな処理して,欲しい情報が得られるようになりました.詳細は後日.購入はこちらから↓http://www.switch-science.com/products/list.php?name=LSM303&search.x=0&search.y=0
2013.02.25
コメント(0)
-
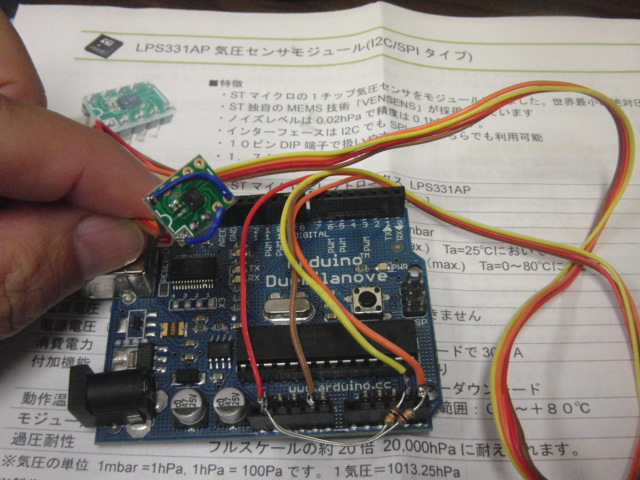
気圧センサLPS331AP,Arduinoで動作確認.
週末にちょっと実験できるように説明書を見ながら間に合わせな感じでハンダ付け.ちゃんと動くかな?精度はかなり良いみたいです.--追記--自宅でプログラミング.気圧センサがちゃんと動きました.3バイト読みだしてシフトしながら処理すると気圧が読み取れます.1022.XX hPa の値が読み出せています.#include < Wire.h>int sensorAddress = 0xB8 >> 1; // LPS331APのアドレス,SA0=GNDで0xB8,SA0=VDDで0xBAunsigned long read2a, read29, read28;float reading= 0; // I2Cで指定したセンサの指定アドレスから1バイト読み出すint i2cReadByte(int deviceAddress, int registerAddress){ Wire.beginTransmission(deviceAddress); Wire.write(registerAddress); Wire.endTransmission(); Wire.requestFrom(deviceAddress, 1); return(Wire.read()); }// I2Cで指定したセンサの指定アドレスに1バイト書き込む void i2cWriteByte(int deviceAddress, int registerAddress, int data){ Wire.beginTransmission(deviceAddress); Wire.write(registerAddress); Wire.write(data); Wire.endTransmission();} void setup(){ Serial.begin(9600); Wire.begin(); Serial.println( i2cReadByte(sensorAddress, 0x0f), HEX); // 気圧センサのテスト,0f番地からBBが読めれば正常 i2cWriteByte(sensorAddress, 0x20, 0xa0); // 0xa0で7Hz,0x90にすると1Hzで気圧を更新 delay(1000); }void loop(){ read2a = i2cReadByte(sensorAddress, 0x2a); // 気圧の上位バイト read29 = i2cReadByte(sensorAddress, 0x29); // 気圧の中位バイト read28 = i2cReadByte(sensorAddress, 0x28); // 気圧の下位バイト reading =(read2a
2013.02.22
コメント(0)
-
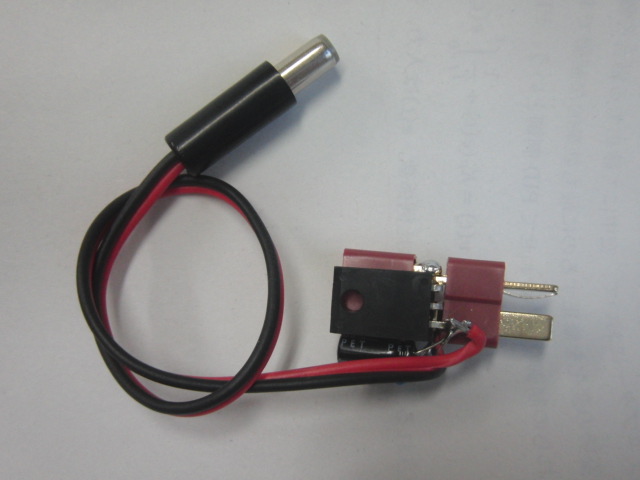
リポの電源分岐用コネクタ(5V1A)を自作しました.
昨日のエントリーのネットワークカメラを搭載する際に電源をコントローラやアンプのBECからとるのは良くなさそうなので,電源分岐用のコネクタを作りました.リポ電池とコネクタの間に挟んで5V1Aを取り出し,ワイヤレスカメラやネットワークカメラに電源を供給します↓回路は秋月で買った3端子レギュレータの回路図通り,製作で気をつけたのは放熱部分を外に向けて熱がこもらないようにすること,バッテリーのオスメスコネクタは直結して大電流に耐えるようにしたこと.配線を露出させないようにこのあとテープで巻いて保護します.買えばこんなのがあるんですけど↓手持ちの材料で自作だと数百円.ブラシレスモーター用UBEC-3A
2013.02.20
コメント(0)
-

ネットワークカメラでFPVはできるのか?
安いネットワークカメラを買ってみた.無線LANのルータを介して接続できてスマホで見れた.屋外使用のためにモバイルルーターを使ったら接続はできていそうなのに画像が見えなかった.設定をいろいろ変えてみたけどだめだった.よくわからない.カタログ的には5-10mが目安とあるが,そんだけ?電源はACアダプタで5V,2Wなので400mAか,ちょっと電力を食う.飛行制御基板から電力をとるのは危険な感じがする.別電源にすると重くなるので嫌だなぁ.トライコプターに載せてみたら,見た目はいい感じなんだけど...これ↓ ロジテック 150Mbps無線NWカメラ LAN-NCW150/S
2013.02.19
コメント(0)
-

WiFiカメラアプリを使ってFPVできるか?
Androidのアプリで,Web of Cam というのをインストールしてみました.外で使うことを想定して,バッテリー内蔵のemobileのWiFiルーターを介して携帯同士を接続します.この場合,ルーターをPCにUSB接続して設定変更が必要でした.デフォルトではWiFi接続された機器同士が直接通信できないようになってますが,これを解除します.片方をカメラ,片方をビューワーに設定してカメラ画像を送れることを確認しました.遅れは約0.5秒.安定した機体ならFPVにも使えると思います.次に,Web of Cam のインターネットアクセスできるバージョンを使って,カメラ画像を携帯電話回線からインターネットに送って画像を受信しようと試みました.結果はビューワー側からカメラの検索はできるものの,接続中にサーバーが応答しないとのことで接続できませんでした.ネットワーク詳しい人に聞いてみたら,もしかしたら回線が遠くてカメラとビューワ間のレスポンスが遅くタイムアウトで接続できてないんじゃないかとのことでした.同じ携帯キャリア間で接続を試せばもしかしたらうまくいくかもしれませんが,残念ながら手元に無いので試せません.
2013.02.18
コメント(0)
-

アルファ技研の低価格エンコーダ,大きさ比較
こちら↓で紹介されていたエンコーダを低価格なので買ってみました.http://anikinonikki.cocolog-nifty.com/blog/2012/12/post-a4ee.htmlアルファ技研さんのページ,REL18シリーズ↓http://www.alphag.co.jp/product.html#REL18直感的に大きさが分かってもらえるように写真をとりました.一番左がREL18です.隣のミニモータ1717よりちょっと大きいです.重量は7gで1717の1/3.持った感じは大きさの割に軽いです.マウスやトレーサーに使うとして,1回転100パルスなので,単位時間当たりのパルス数を測って速度を出そうとすると分解能が足りませんが,逆に1パルス当たりの時間を測って速度を出せば,それなりに使えると思います.距離分解能は25-30mm程度のタイヤを使うんだったら許容範囲でしょう.
2013.02.18
コメント(0)
-

風が強くても飛ばせるアレ
クアッドコプターやArduPlaneを飛ばそうと思っても風が強くて飛ばせない日が多いです.ならばアレ・・・ということで,青春時代に遊んだ安物スポーツカイトを引っ張り出してきました.残念ながら今日は雨.
2013.02.18
コメント(0)
-
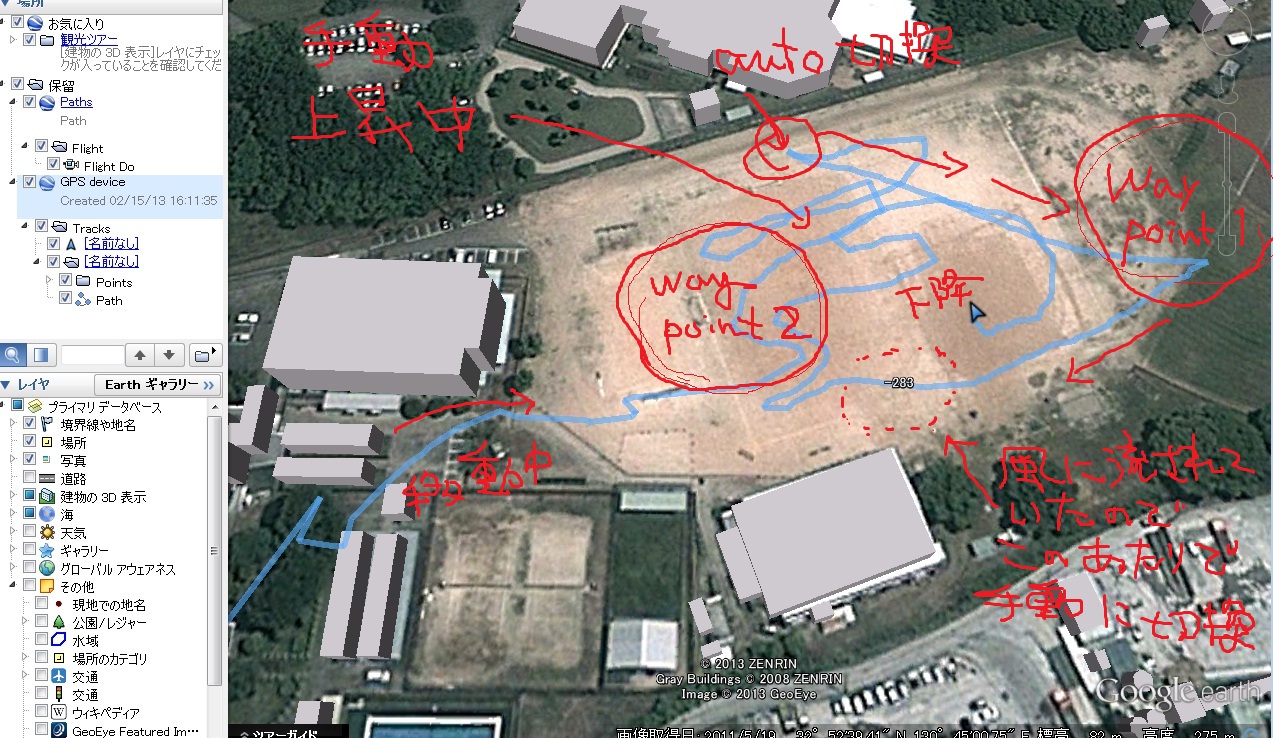
R/C無尾翼機をArduPlaneに改造,その7
Stabilizeモードで飛行できたら,次はフライバイワイヤーモードで飛ばすとオンラインマニュアルにある.切り替えると高度維持して飛ぶらしい.http://code.google.com/p/ardupilot-mega/wiki/Tuningロール,ピッチの角度上限や調整について書いてある.角度上限は良いとして,ナビ制御用のパラメータの比例係数ほかは多分あげないといけない.制御用パラメータは,例えば目的の方向に対して反対方向を向いている時の旋回させるための制御量の比例係数.機体の姿勢制御が緩やかになったので自動航行の舵角も半分になっている.ナビ制御パラメータが初期値のままで,姿勢制御パラメータを下げた状態では,反対方向を向いてもわずかしか変化しない.双方初期値のままで反対方向を向いた時の舵角と同じくらいの変化をさせるためにはナビ制御のパラメータを2倍しないといけない.室内でPCでにつないで向きを変えながら,適当な舵角になるように,押さえ気味で以下のようにパラメータを少しずつあげた.Nav Roll Pid P 0.7 -> 1.2I 0.02 ->D 0.1 ->Nav Pitch AS PidP 0.650 -> 1.1I 0.1 ->D 0Nav Pitch Alt PidP 0.650 -> そのままI 0.1D 0Autoモードで位置を変えながら自動操縦できるらしい.マップ上に2点のWaypointを設定.高度は100mとした.設定した高度は初期値から相対高度で100m上まで上がるらしい.グラウンドの標高が80mほどなので,約180mまで上昇する予定.試験飛行風が強かった.風速5-10m/sくらいなので,フライバイワイヤーで調整はできないので,その先の,Autoの自動操縦を試して見ることにする.まず,Stabilizeモードで手動操縦で風に向かって飛ばしながら十分な高度に上げた.Autoモード切替後,最初のウェイポイントに流されるように進んだ.その後戻ってきたので,最初のポイントはクリアして次のウェイポイントに向かっているようである.風にほぼ相対しながら,横に滑るように次のウェイポイントに向かっている.しかし,風が強いので後ろに押し流されているようで,このままでは危険なのでウェイポイントに達するのを待たずに手動に切替えて着陸させた.その後,GoogleEarthでログを確認.飛行目線の動画は本当に飛んでいるようだ.飛行中の高度は,設定通り180m前後.座標の履歴と手描きメモがこちら(テキトーな感じですみません)↓いちおうGPSを使ってAutoモードでも飛ぶであろうことが確認できた.風がなかったら多分問題なく自動操縦できるだろう.その時の動画はこちら→ ArduPlaneを強風でオートパイロットさせてみた ここまでをフリーページにまとめました→ ArduPlaneの製作
2013.02.15
コメント(0)
-
R/C無尾翼機をArduPlaneに改造,その6
ArduPlane墜落した... その動画ほぼ安定飛行ができてたので,無視してたupdateをしてPIDのパラメータだけ確認して,ちょっと調整して飛ばしてみた.Stabilizeモードに切り替えたとたんにキリモミして墜落.ペラ破損,尾翼破損,モーターがちょっと異音.調べてみると,Stabilizeモード自体はよさそうだけど,ちょっと操縦をかけるとサーボがっむちゃくちゃな動作をした.どうやら,最初のR/Cのキャリブレーションがリセットされてるようだ.!!!アップデート要注意!!!あちこち修理して,もう一度キャリブレーションやレベル調整をやり直し.飛ばしてみたら,綺麗に安定飛行した.わずかに曲がる傾向があったのでトリムで調整したら手放しで直線飛行するようになった.でもAutoで安定して飛ぶためにはR/Cなしで安定飛行しないといけないはずなので,最初のレベル調整をちょっとだけ傾けててまた試してみる.stabilizeモードでの飛行中の動画
2013.02.14
コメント(0)
-
R/C無尾翼機をArduPlaneに改造,その5
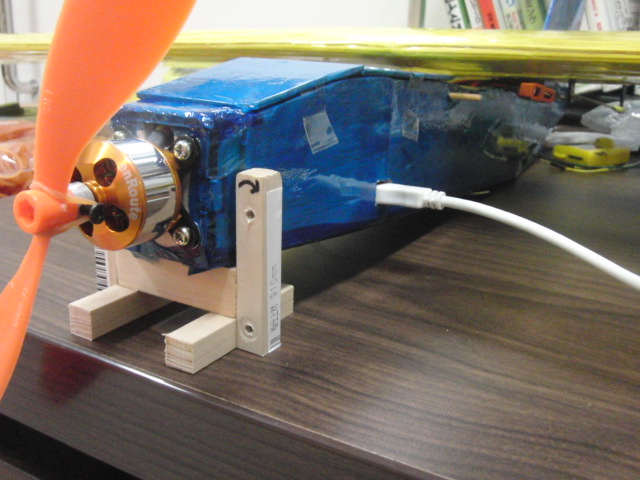
stabilizeモードで安定飛行できました.以下,そのメモ書き.初期は,機体水平を基準レベルとする.ペラ無しで滑空させたら,滑空性能は悪い.トリムとリンケージ調整をした.その後飛行,Manualモードでプロペラを回すと操縦できたが,Stabilizeモードだとどんどん下がってきて機体も安定しない.機首水平だとだめ,制御係数も高すぎるのか?調整水平レベルを前2cmあげた状態を基準に調整した.プロペラ飛行時は,機首あげになっていないといけないため.パラメータの調整Servo Roll Pid P 0.4 -> 0.2Servo Picth PidP 0.6 -> 0.3 それぞれ半分に変えてみた.結果Stabilizeモードの切り替えると少し下降気味,後少し機首上げが足りない.エレベータトリムをアップすると丁度いい感じになった.ただし,その状態でManualにすると機首上げ気味になって操縦しずらい.Stabilizeモードで安定飛行している状態では,エレベータ,ラダーの操作なしでほとんど直線飛行する.風が強かったが風に向かっている方向だとほぼ直進.風が横から当たると流されるが大きく姿勢が崩れることはない.スロットルが中央よりちょっと下でレベル維持.上げ下げすると上昇,下降する.一低高度で飛行するには微妙なスロットル操作が必要.ラダーを切ると傾いて旋回,戻すと水平飛行に戻る.エレベータも同じで離すと水平に戻る.着陸は風に向かってスロットルを絞りながらゆっくりアプローチして高度1m位でスロットルオフ.着地直前にエレベータフルアップでブレーキをかける.プロペラはゴム固定なのでふにゃっとなるが,折れたりゴムが切れたりはしない.スロットルオフしても風でプロペラが回りっぱなしなのでハンドキャッチはちょっと危険.折ペラ買って交換するか.7.4V,600mAhで15分ほど50-200mを飛行.フル充電から定格値くらいまで電圧が下がった.地上で固定してスロットル中央で回した時,電流は2.2A.飛行時は抵抗が下がるので電流もちょっと下がるとして,計算上は20分ほど飛行が可能.機体重量はバッテリーなしで294g,600mAhバッテリー込みで330g.1900mAhで430g.--追記--ちょっと機首上げしてレベル調整するための治具を作りました.
2013.02.13
コメント(0)
-

R/C無尾翼機をArduPlaneに改造,その4
ArduPlaneの試験飛行.まずプロペラなしで滑空性能をみる.重いとダメージが大きいので小さなバッテリーで.投げたら前重心になりすぎてたのでバッテリーを後ろにずらしエレベータアップ.数回投げてトリムとリンケージ調整後stabilizeモードで投げると姿勢安定するが失速ぎみ.これは,水平を基準にしたためか?グライダー的には頭下げが基本だけど,通常飛行では動力があるので水平飛行が基準で多分問題なし.次はプロペラをつけて飛行試験.滑空できてるのでプロペラ回せば普通に飛ぶはず.--追記--プロペラを付けて飛ばしてみました.3D動画をyoutubeにアップしました.Manualとstabilizeモードでのテスト飛行の3D動画です.安定性がなく操縦が難しい機体ですが飛ばしながらトリム調整して徐々に安定してきました.滑空性能はないですが,プロペラを回して飛ばせば大丈夫です.stabilizeモードにすると逆に操縦が難しくなったのでパラメータ調整が必要のようです.この機体はモーターを回して少し機首上げの状態を基準にした方が安定が良いようなので,その状態で制御パラメータを調整してみます.3Dで動画を撮ってみました→ 無尾翼ArduPlaneの3Dテスト動画広告↓リアルdeアートな切り紙飛行機の設計 普通翼機、先尾翼機、無尾翼機を作って四季の爽風に乗せてみよう (単行本・ムック) / 大空翔/著
2013.02.13
コメント(0)
-
国内のFPVはキビシイ?
今日は雨なので外で飛ばせなかった.R/Cモグラに積んでるのは仕様では見通し30mのもの.確かにそれ以上はきびしい.それで週末はFPVってに使えるワイヤレスカメラをあれこれ探してみたけどせいぜい100mまで,それ以上届くものは海外の通販しか見つからない.でもそれらは電波法の規制で国内での使用は違法の物が大半のようです.ネットワークカメラも結構届くものがあるようですが,やっぱり100mくらい?しかもディレイがあって相当安定な機体にしか使えない模様.(海外では500mWとか1Wとか平気で売ってるので数キロ届いて当たり前って感じです)無線の免許を持ってる自分としては違法なことはできないと諦めるとして,合法な方法で1000m越える上空でFPVできないか考えてるんですが,スマホのカメラ画像をそのまま3Gで地上のPCやタブレットに送るのは有りなんでしょうか.スマホも地上・海上での使用に限られてたりするとダメかもしれませんが.
2013.02.12
コメント(0)
-
R/Cモーターグライダ-をFPVで飛ばしてみたけど・・・
昼休みにFPV飛ばしてみた.今日は風が強かったので,FPVだけで飛ばすのはほとんど無理.目視で100mくらい上げてゆっくり飛ばしながらヘッドマウントディスプレイで見た程度.手放しで安定して飛ぶくらい機体の調整をして無風だったらいけるんじゃないかなって感じ.また後日.
2013.02.08
コメント(0)
-

R/Cモーターグライダ-をFPVにしてみた.
10年以上前に作ったR/Cモーターグライダ-を引っ張りだしてまた飛ばせるように修理した.そして,小型カメラを載せてFPV化.こんな感じで搭載した↓明日晴れたら飛ばしてみよう.--追記--FPVで空しか見えてないと機体の姿勢がわかりにくいと思うので,ピッチの安定のためにジャイロも追加しました.主翼はラダー機用も作ってるので,それで飛ばせばロール軸の安定は多分OK.
2013.02.07
コメント(0)
-

自分にバックモニターつけてみた.
ヘッドマウントディスプレイに小型ワイヤレスカメラを付けてそのまま映して歩いてみた.いつもより遠い感じで,視野が狭く,遠近感がないけど,まあ歩けた.小型ワイヤレスカメラは2台あるので安全のために,バックモニターをつけてみた.手元の受信機で前後切り替えられる.後ろにも目があるってのは便利なようだが実はそうでもない.後ろ向きに歩くのはちょっと難しかった.
2013.02.07
コメント(0)
-

クアッドコプター試験飛行 (屋外空撮)
研究室のYくんがQuadCopterの屋外空撮をyoutubeにアップしてます.ADIXXIONでの空撮です.こちら→ クアッドコプター試験飛行3 (屋外空撮) 【送料無料】【在庫有り♪13時までご注文・決済完了で当日発送可能!】ビクター GC-XA1-B スポーツカム/デジタル5倍ズーム ADIXXION【送料無料】
2013.02.06
コメント(0)
-

QuadCopterにカメラを積んで安定飛行したので次はFPV
先日飛ばそうとしたら重くて上がらなかったのですが,新しい電池を購入して飛ばしてたら余裕で飛びました.単に電池が古くてヘタッてたようです.飛行時の重量は785g,11.1V-2200mAhで7分以上は飛びます.その空撮次は,ワイヤレスカメラセットとヘッドマウントディスプレイを使ってFPV化.カメラは9V仕様ですが,5Vでも動作したのでケーブルを作ってサーボの電源から供給.(電波がどのくらい届くかは分かりませんが)受信機も適当にケーブルを作って電池から電源を取り,モバイル化しました.3DのFPVって一般的じゃないんだろうか.そのものずばりのカメラと3Dヘッドマウントのセットが見当たらない.実はワイヤレスカメラモジュールをもう1セット持っていたりするんですが・・・
2013.02.05
コメント(0)
-
R/C無尾翼機をArduPlaneに改造,その3
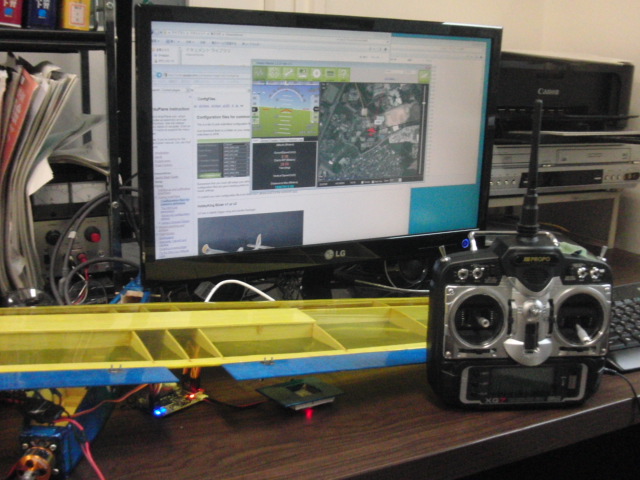
APM2.5にArduPlaneのファームを書き込んでPCのと接続して調整中.とりあえずつないでみて英語のWikiを斜め読みしながらやってます.エレボンの時の接続の説明通りに接続,1ch左,2ch右,3chスロットル.モード切替のためにギヤを8chにいれる.送信機側をエレボンに設定.受信機のキャリブレーションのところで,送信機の信号の上限下限と,エレボンのミキシング,チャンネルの反転の設定をした.8chのモード切替でmanualとstabilizeの切替をするように設定.Manualモードでは送信機の通りに動作.stabilizeに切り替えると,Manual信号を基準にコントロールボードの傾きにに合わせて調整が入った.切り替えた時にスロットルがoffになったのはなぜ?とりあえず配線はこれでよさそうなので機体に納める.センサの出力を表示させてみた動画
2013.02.05
コメント(7)
-
R/C無尾翼機をArduPlaneに改造,その2
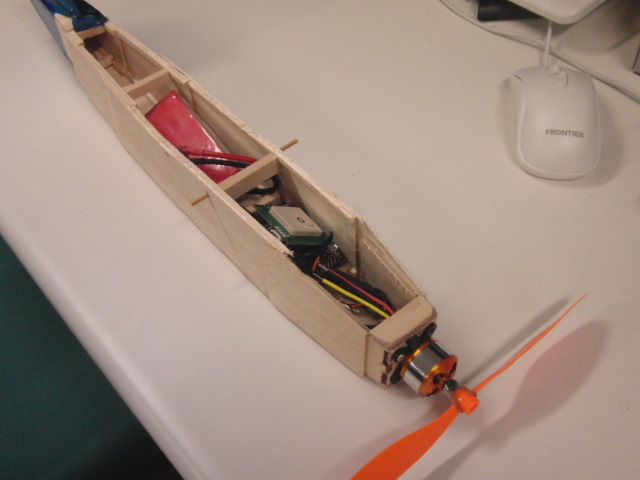
頭にあると気になってしまうので,いっきに製作.勘が鈍ってて,重心を合わせるために機体の長さを3度作り直しました.電池なしで重心がちょっと前より.電池を積む位置で重心を適当に調整できます.GPSの部分に窓を開けました.あと,アンプ冷却のための空気穴も必要ですね.350-400クラス相当のブラシレスモータとLipo1900mAhを載せて,389g.フィルムを貼って,ケーブルを配線して,450g以内にはおさまりそうです.--追記--フィルム貼った.アンプつないでモーターを回してみた.スロットル2/3で5Aくらいで結構引っぱる.3Aくらいでレベルキープ位か.20分くらいは飛んで欲しい.
2013.02.04
コメント(0)
-
R/C無尾翼機をArduPlaneに改造,その1
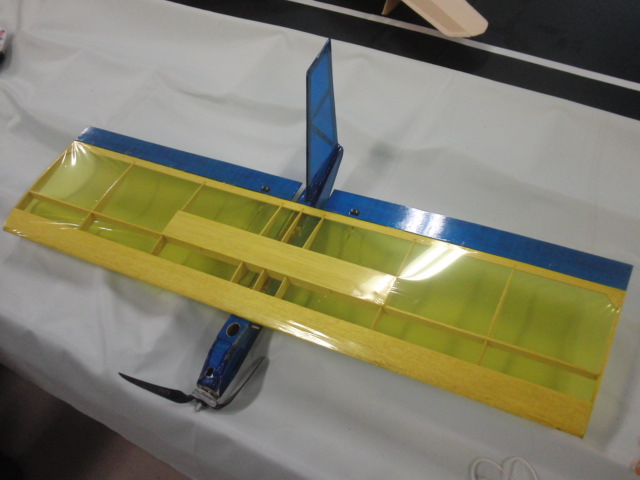
10年以上前に作ったR/Cの無尾翼機.これを元にArduPlane改造できないか考えました.コントローラのAPM2.5を載せようとしても横幅が狭すぎ,バッテリーの収納も難あり.惜しまれつつも,いっきに解体.積んでいたモータはこれ↓ QRPのモータとギヤダウンユニット,ペラ合わせて128g.こんなイメージで幅を広げて機体を作り直します↓ そのうちに.
2013.02.04
コメント(0)
-

0.1mmカーボンシートと1mmバルサシートの複合素材の強度
プーチン号さんに衝撃をうけたので,自分も軽量化について考えてみました.こちら↓http://pu-chin.blogspot.jp/2011/11/blog-post_24.html0.3mmのCFRPは加工も大変そうで衝突で破損もするようなので,違う手段で機体を作れないか考えました.下の写真は,0.1mmカーボンシートでバルサシートを挟んで瞬間接着剤でのつけた複合素材.バルサは1mm厚と2mm厚の物.比較にカーボンシートをT字に貼りつけたものも作りました.まず,T字のカーボンシートはそこそこ強いものの,ねじれに弱いです.接着も大変.複合素材は軽さの割にかなり強いです.ねじれにも強いです.圧縮方向には弱いです.このままでは穴を開けてのネジ止めは不可です.ネジ止めしたいところだけワッシャなど固い材料をバルサを切り抜いて挟み込めば良いです.強度的に十分なのに加工性が良いです.普通にハサミで切れます.強度を数値的に確認するため,こんな風に実験しました↓3cm程度の距離で真ん中に力がかかるようにして上から押し付けて材料の変形をみました.1mmバルサは250g位でペキッといきました.2mmだと700gくらい.T字に貼ったカーボンシートは800gで一部剥げました.1mmバルサの複合素材は1kg(秤のMAX)かけても大丈夫.せっかく作ったので壊さないままにしておきます.2mmバルサの複合素材は1kgでも全然余裕.重量は,写ってるもの全部乗せても1gもありません.マウスやトレーサの機体を作っても数gでしょう.
2013.02.01
コメント(0)
-
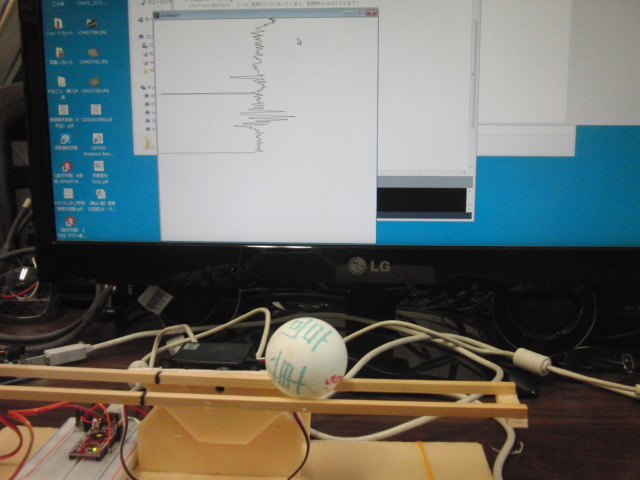
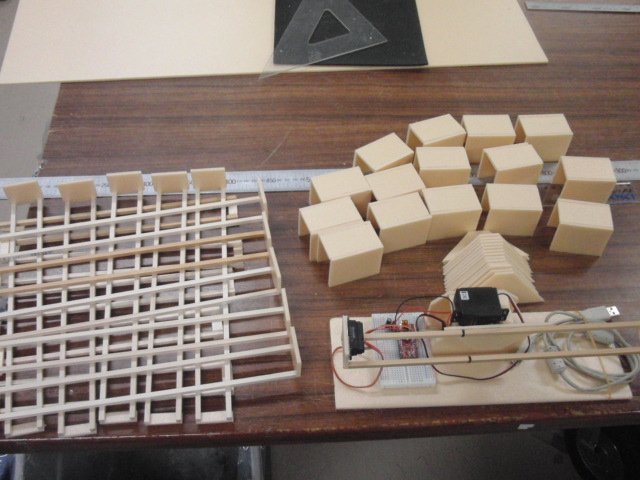
ボール&ビーム制御実験装置のデータを表示させてみた.
制御工学がご専門のO先生にデータをグラフに表示できたらいいねって言われたので,シリアル通信でデータを出力して,プロセッシングで表示させてみました.距離をグラフ化してます.センサの特性でかなりのノイズが乗ってることがわかります.センサのノイズ除去を上手くやらないとピタっと止まらないことが理解できます.
2013.02.01
コメント(0)
全24件 (24件中 1-24件目)
1






