

2013年10月の記事
全8件 (8件中 1-8件目)
1
-
GPSロボットカーコンテスト2013 と Make Faire Tokyo 2013
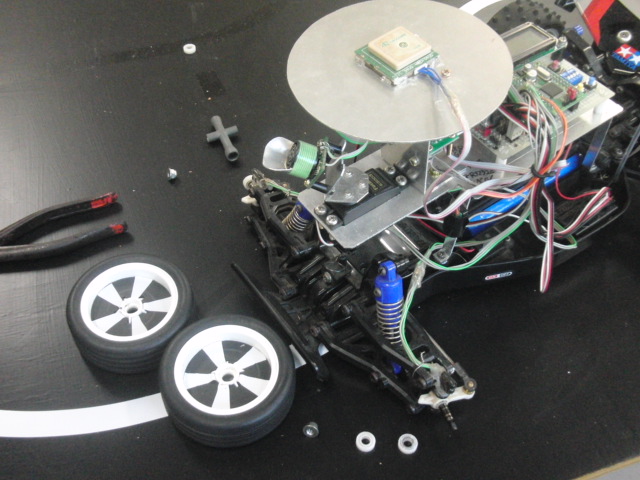
11/2,今週土曜日はGPSロボットカーコンテスト.開催案内↓ http://www.gnss-pnt.org/symposium2013/robocar.html作ったのは2010年の3月くらい.前輪を外してメンテナンス.なぜかというと自作のロータリーエンコーダが汚れてます.ちゃんとしとかないと,暴走する可能性ありなので.結構強い有機溶剤で拭いて汚れを落としました.途中でタイヤに触れたら黒くなったのでタイヤも溶かすくらいです.試しにマウスのタイヤをこれで拭いてみたら一皮向けてすごくグリップがよくなりました.でも・・・溶剤で表面がやられて明日あたりカピカピになってるかも.車輪のメンテナンスは終了.充電して,GPSの受信状況を調べて,ソフトを読んで思い出して,書込チェックをしたらあとは現地で座標入力したらロボット任せ.続く11/3,4は Make Faire Tokyo 2013http://makezine.jp/event/mft2013/まだ準備してない・・・
2013.10.31
コメント(0)
-
マイクロマウス九州地区大会と中部地区大会
地区大会に連戦してきました.まず,九州地区大会について今年は参加者が少なく,クラッシック3位,2位の入賞辞退で繰り上げ2位で準優勝の賞状を頂きました.探索の帰りで必ず同じ場所で引っかかっていたので何か苦手なパターンがあるのか,古い壁なので反射率が極端に低いものがそこにあったとか,原因は不明です.ハーフは,ゴール座標を入れ間違えていてゴール区画の隣で停止,お粗末なリタイヤ.ロボトレースは優勝.参加者が少なかったので...中部地区大会は,クラッシックとロボトレースに参加.クラッシックは,探索の往復は成功,2回目に抑え目のスラロームで約15秒でゴール,帰りに重ね探索.3回目以降はすべてミス.重ねでほぼ最短が見つかっていたのに,もったいなかった.ロボトレースについて,コースが滑り易いのかR15でミス連発でした.なのでコーナーはかなり速度を落として走行.長い直線は未調整でしたが,調整しようとしてみるとパラメータの連動に不具合発見.ジャイロをちょっと強くするに留めました.1回目ゆっくり探索は成功,2回目抑え目で加減速走行は成功,3回目で少し速度をあげたら何でもないR15でコースアウト.結果は4位.でも普段と違うコースを走っていろいろわかったことがあるので収穫はありました.来週はMTF2013出展.2日間展示しながら全国大会に向けて調整できます.大会の結果はこちらから第23回 マイクロマウス九州地区大会第32回 マイクロマウス中部地区大会
2013.10.29
コメント(0)
-
4脚ロボット,動き始めました.
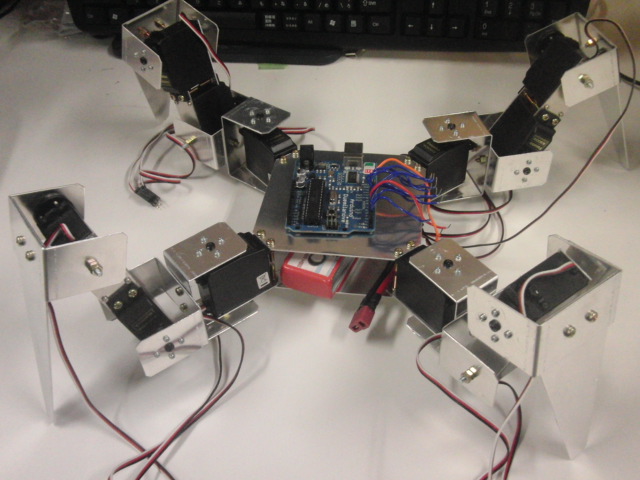
Arduinoのバニラシールドを使って配線.センサ等を載せるスペースは十分空いてます.サーボを動かす時に電流を食ってマイコンが誤動作しやすいので,電源は2系統に分けました.1つはArduino専用でDCジャックからリポ2セルで供給予定,今はUSBから供給しながら開発.もう一つはサーボ専用にニッケル水素5本.本体裏側に電池ケースを貼り付けています.裏面の電池搭載4本と2本の電池ケースで1本分はショート↓前にリストを載せたサーボの順に少しずつ動かすサンプルプログラムを実行してみました.ピクピク動いてますが,ここまでできたら後は時間の問題で歩き出します.動画はこちら→ 4脚ロボット・サーボテスト
2013.10.16
コメント(2)
-

シンガポールのテマセクポリテクニックにてロボトレーサを題材に技術交流
学校の研修旅行での学生の交流イベントの中でロボトレーサを題材に技術交流を行いました.その様子↓(プライバシーに配慮して顔にはぼかしを入れてます)現地で一緒に組み立てて,サンプルプログラムを元にmbedでプログラミング.最後はコンペティション.廊下にビニールテープを貼って即席でコースを作りました.いろいろ反省点はありますが,楽しんでもらえたようです.
2013.10.15
コメント(0)
-
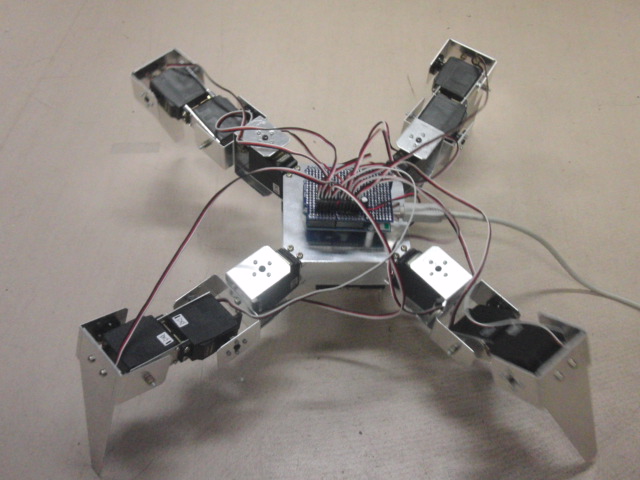
4脚ロボット,胴体ができて脚がついた.
ちょっとシンガポールに1週間いってましたので更新がなかったですが,N君が頑張ってます.胴体(といってもアルミ板2枚)ができて形が見えてきました.Arduino上にちょっと回路をのせてサーボを接続するだけでハードは完成.ソフトのひな形もできてるので,モーション作れば歩きます.あとは,どんなセンサを積んでどんな目的で自律歩行させるか.
2013.10.15
コメント(0)
-
何だか忙しくていろいろ仕事が滞りがちなので・・・
何だか忙しくていろいろ仕事が滞りがちなので今年何をしてたっけと思って,今年1月から何をしてたっけ?と思ってリストを作ってみたら,これだけ作ったり発表したりしてました.どうりで忙しかったわけです.ボール&ビームの教材15セット4140Bの自動測定システム移植レーザー加工機で顔スタンプGPSロボットカーキットカメラジンバルFPVラジコンホバークラフト竹ひごで作った竹とんぼ吹き矢とか活性化エネルギーの学習モデル反応速度を測る装置空撮用の治具いろいろFPV用工作いろいろインターバル撮影用の回路基板とプログラムSENSE BOARD (理科教材用のセンサボード)16gの軽量なGPSロガーmbedを使った競技仕様マイクロマウスmbedを使った競技仕様ロボトレーサ演習用のmbedロボトレース26台演習用のArduinoマイクロマウス15台のベースロボトレースのコース空撮用飛行機(Arduplane)Arduplaneの無尾翼機トライコプターヘキサコプター(クアッドから改造)ヘキサコプターの水上離着陸用フロートトライブレードコプター飛行体の改良4脚ロボット製作中あと未公開工作2件.学会・非学会・学生会発表指導 7件出展2件未公開の特許案件3件
2013.10.05
コメント(0)
-
水中ロボットコンテスト
興味あるんですけど,マイクロマウス九州・中部地区大会と重なって見に行けず残念です.平成25年10月26日(土)~27日(日)日本サバイバルトレーニングセンター(北九州市)http://www.marine.osakafu-u.ac.jp/~lab06/kitakyushu2013/
2013.10.01
コメント(0)
-
4脚ロボット製作中,プログラムで動かせるようにした.
Arduinoを使って制御ソフト作成中.配列にモーションを定義して,順次呼び出して動かせるようにプログラムしました.胴体に組み上げたら,後は地道にモーションを作れば歩くはず.その動画→ 4脚ロボット製作中,プログラムで動かせるようにした.スケッチは簡単↓#include < Servo.h> int o[12]={0,0,0,0,0,0,0,0,0,0,0,0}; // サーボのニュートラルのオフセットint r[12]={0,0,0,0,0,0,0,0,0,0,0,0}; // サーボの制御入力(例えばジャイロ補正など)// 形態定義// 1脚3関節(第1,第2,第3)×4(1:右前,2:左前,3:右後,4:左後)+変形時間// 13個まで形態定義可能int form[13][13]={ { 90, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90,150}, // 基本形態,ニュートラル位置 {120, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90,150}, { 90,120, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90,150}, { 90, 90,120, 90, 90, 90, 90, 90, 90, 90, 90, 90,150}, { 90, 90, 90,120, 90, 90, 90, 90, 90, 90, 90, 90,150}, { 90, 90, 90, 90,120, 90, 90, 90, 90, 90, 90, 90,150}, { 90, 90, 90, 90, 90,120, 90, 90, 90, 90, 90, 90,150}, { 90, 90, 90, 90, 90, 90,120, 90, 90, 90, 90, 90,150}, { 90, 90, 90, 90, 90, 90, 90,120, 90, 90, 90, 90,150}, { 90, 90, 90, 90, 90, 90, 90, 90,120, 90, 90, 90,150}, { 90, 90, 90, 90, 90, 90, 90, 90, 90,120, 90, 90,150}, { 90, 90, 90, 90, 90, 90, 90, 90, 90, 90,120, 90,150}, { 90, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90,120,150}};// モーション定義// 1モーションについて最高10個の形態変形で作る.// モーションは最高5個まで定義可能.int motion[5][10]={ { 0,99,99,99,99,99,99,99,99,99}, { 1, 2, 3, 0,99,99,99,99,99,99}, { 4, 5, 6, 0,99,99,99,99,99,99}, { 7, 8, 9, 0,99,99,99,99,99,99}, {10,11,12, 0,99,99,99,99,99,99}};Servo leg11; Servo leg12; Servo leg13; Servo leg21; Servo leg22; Servo leg23; Servo leg31; Servo leg32; Servo leg33; Servo leg41; Servo leg42; Servo leg43; void doMotion(int n){ for(int i=0; i
2013.10.01
コメント(0)
全8件 (8件中 1-8件目)
1
-
-

- 私のPC生活
- PC画面保護フィルム
- (2025-11-23 12:55:08)
-
-
-

- 楽天ラッキーくじ
- 楽天ラッキーくじ更新情報(2025/11/…
- (2025-11-24 13:15:41)
-
-
-

- デジタル一眼レフカメラ
- 大人のリカ活&ミニカメラ サウンド…
- (2025-11-14 10:36:31)
-



