

2013年04月の記事
全15件 (15件中 1-15件目)
1
-
mbed演習基板の続き
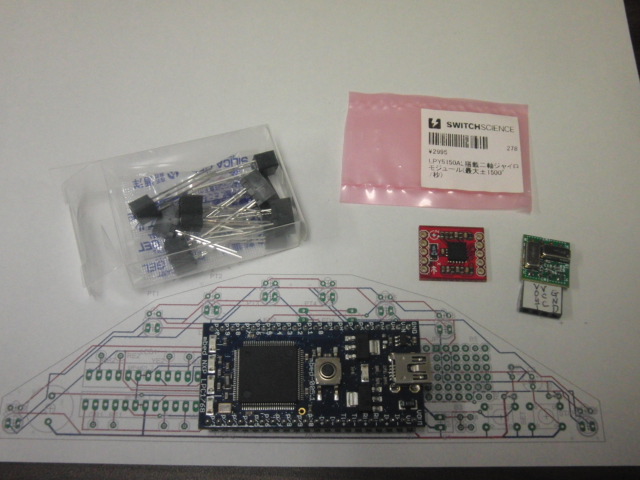
演習だけならジャイロなしでもいいですが,速度を上げるとジャイロが欲しくなってくる.秋月電子通商のジャイロモジュールが安価なので,L型のピンソケットを使って立てて使えるようにしました.でもレンジが低すぎ.ちょっとスピードを上げると出力が飽和してしまいます.手持ちでスイッチサイエンスのジャイロモジュールLPY5150ALがありますが,これはもう廃版.いろいろ考えましたが,LPY5150ALも乗せられる寸法でユニバーサル領域を確保しました.これで競技にも対応できます.急ぎの仕事があるのでここでいったん止め.次に時間が空いたら見なおして基板発注します.
2013.04.25
コメント(0)
-
mbedを使った簡単な演習用のハードウェアとして・・・
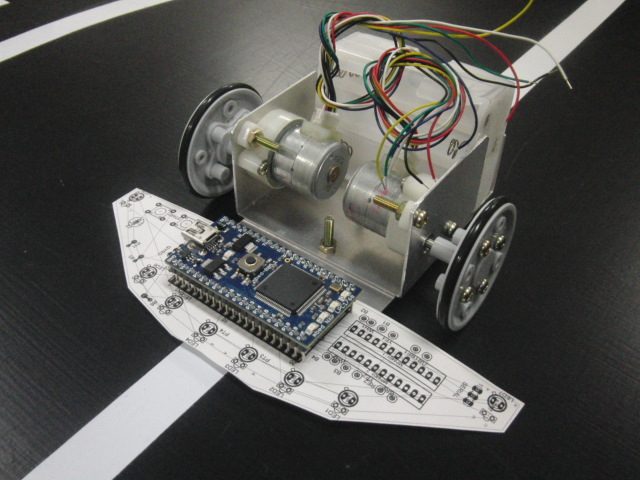
ハードとソフトの両方の入った簡単なオリジナルな演習はないか?という要望がきまして,こんな感じでいわゆるライントレースロボット(実はロボトレーサ)の基板を設計してみることにしました.足回りは秋月電子通商さんの安いステッピングモータを利用して単三6本で回すので,ジーコジーコって感じでゆっくりしか走りませんが・・・モータを変えるとそこそこスピードが出るかもしれません.昨年のロボトレーサとのスナップ↓でもパワーMOSFETからダイレクトにモータを回す回路なので,mbedを壊す可能性大です.
2013.04.24
コメント(0)
-

ラジコンホバークラフトでFPV
また無線カメラを積んでFPV化してみました・・・が,もはやあまり新鮮味がありません.思い通りに操縦できないという点では面白いのかも.試しにジャイロでも積んでみるかな?昨日からマイナーチェンジ後(重心位置移動,ラダー大型化)に無線カメラを積んだところ↓
2013.04.23
コメント(0)
-
ホバークラフトのおもちゃの自作
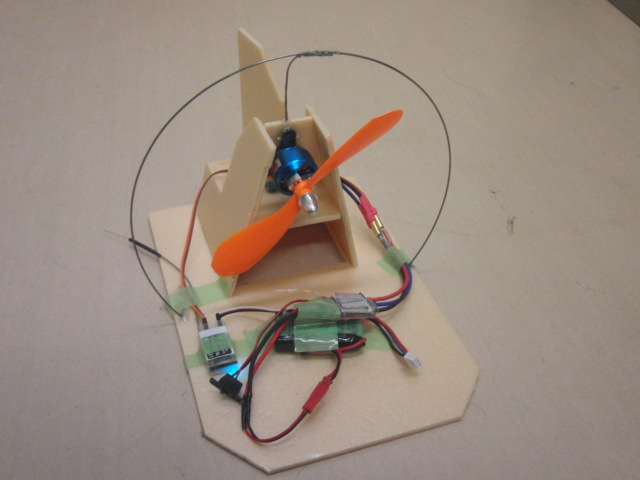
科学体験イベントなどで電動ブロワーを使って人が乗れるホバークラフトを見たことがあり,うちの学校にもあったらいいなぁと思ってネットを見てたら,小さいおもちゃなら簡単に作れそうなので試しに作ってみました.手元にあった部品(結構贅沢な部品)を使ってこんな感じでできました↓作り方は・・・まず適当な大きさのビニール袋でスカートを作ります.両面テープを貼って中央を切り抜き.発泡スチロール板を適当に使ってモータ・プロペラを固定.下半分から空気を取り入れて下面に流します.ベースになる板に穴を開けて,先に作ったモータ・プロペラを固定して,裏面にスカートを貼り付け.サーボとラダーをホットボンドで取付,約1時間で出来上がり.回してみたらすんなり浮いて走りました.コントロールが結構難しいですが楽しめます.安全性を考慮して,最終的には最初の写真のようにプロペラガードを針金で作り,機体の先の角を落として完成.その動画→ ホバークラフトの自作--追記--遊んでいたら,気になる点が出てきたので若干機体の修正をしました.抵抗のあるところで走らせると,後ろが浮いてきました.なぜかというと,エアの吹き出し口が後ろの方にあることと,プロペラが前方向に押すモーメントのためです.重心はほぼ中央に位置するように作りましたがそれだけではダメでした.製作上で気をつけた方が良い点は,エアを中央から均等に吹き出す.重心できるだけ中心に寄せる.左右に重量バランスが崩れると,軽い方からエアが抜けてしまう.プロペラの反力と気流の渦を考慮してモーターを少し傾けて付けておいた方が良い.などです.世界最小級!手のひらサイズのエアー・カー【あす楽対応】【アウトレット・訳あり】赤外線コントロール(ラジコン)ホバークラフトホバーQ HO-03 オレンジ
2013.04.22
コメント(0)
-
FlexiTimer2ライブラリ
覚え書き.Arduinoでマイクロマウスを作った時はタイマー割込みにミリ秒オーダーのMstimer2を使ったんだけど,同様にArduinoでロボトレーサを作ると遅すぎてお話にならない.なので,もっと早い周期のタイマーとしてFlexiTimer2があるのでこれに変えて周期を短くしたら少しスピードアップできそう.http://www.pjrc.com/teensy/td_libs_MsTimer2.html
2013.04.18
コメント(0)
-
カメラジンバルとAPM2.5を接続してカメラの安定化
先日作ったカメラジンバルとAPM2.5を接続して,方向や角度を設定してカメラの安定化をさせてみました.激しく動かしてもそれなりにカメラが固定されています.ただし,サーボに電流が結構流れて加熱し,モータアンプのBECの限界を超えてるようで,アンプも同様に熱を持ち焼けてもおかしくない状況.別に電源を取らないといけないようです.その動画→ カメラジンバルとAPM2.5を接続してカメラの安定化
2013.04.17
コメント(0)
-

トライコプターにもカメラジンバル
クアッドコプター用に作ったカメラジンバルをトライコプターにも付けられるように,足の付け直し中(by研究室の学生さん,がんばれ!)
2013.04.15
コメント(0)
-

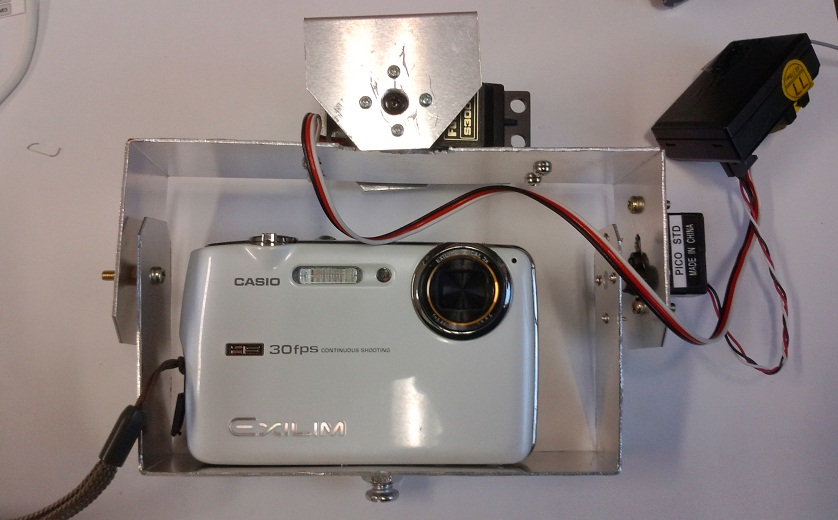
自作カメラジンバルのシャッターを追加
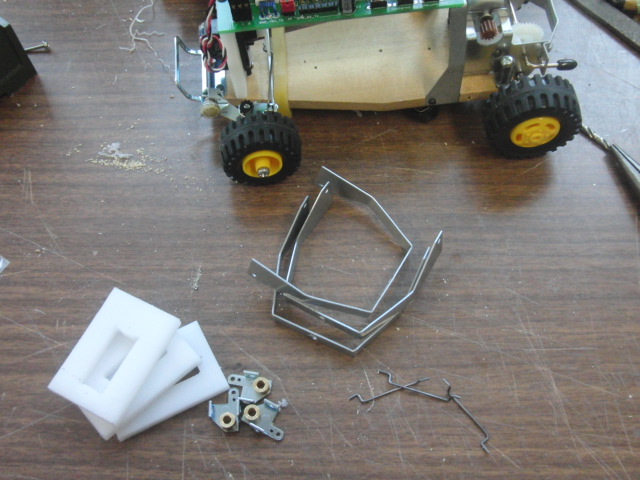
静止画空撮を行うために,昨日作ったカメラジンバルにシャッターを追加しました.作ったパーツはL形の金具を大小2種類,L形の金具に固定したサーボ.これらを組み合わせると,次の写真のようになります.裏面からの写真.3軸でスライドできて自由な位置にサーボを固定できます.カメラを乗せたところ.組み替えると違う形のカメラにも対応.シャッターを切るとアルミ板がたわんでしまうのですが,適度なクッションになってるのでシャッターを切りすぎてサーボを焼いたりカメラを壊すこともないと思われます.その動画→ 自作カメラジンバルのシャッター部分
2013.04.11
コメント(0)
-
GPSロボットカーキット,配布準備
POM板の切り出しと加工,タミヤのバギー工作基本セットの部品の加工をして・・・とりあえず3セット準備中.足りない部品の調達が間に合ったら,来週開催される測位航法学会のH25年度全国大会で評価用に提供する予定.詳しくは現地で共同研究者のI先生にお尋ねください.学会の開催案内→ http://www.gnss-pnt.org/taikai25/
2013.04.11
コメント(5)
-
空撮用カメラジンバルを作ってみた.(追記あり)
強度的にかなり不安なものの,廃材をベースにカメラジンバルを作ってみた.作った後に,やっぱり新しい材料でもう少し幅を取って強度を出した方が良かったと思った.ヘリの振動で揺れが大きい時はバルーンやカイト空撮に使えるので無駄にはならないと思う.--追記--せっかくなので作業時間2時間で足を作りなおして高さを上げてジンバルを組み込んでみた.補強も入れたので結構重くなった.本体,カメラ,電池まで合わせてほぼ1kg....浮くのか?広告↓お手ごろ価格を実現したジンバルヘッドBENRO ベンロ ジンバルヘッド GH-2
2013.04.10
コメント(0)
-

MeshCAM使ってみたら,リトフェイン加工もできるらしい.
POMで同じ部品を20個くらい削り出さないといけないので,MeshCAMという3D-CAMソフトを使ってみた.部品を切り出す以外に,こんなこともできるらしい↓これも学校のイベントで使えるかもしれないけど,かなり時間がかかりそう.学園祭で1枚500円で製作とかで学生さんの出店用かな?購入したのはこちらから↓KitMillシリーズhttp://www.originalmind.co.jp/products/kitmillMeshCAM V5http://www.originalmind.co.jp/goods/03516
2013.04.10
コメント(0)
-
レーザー加工機で顔写真のスタンプ
学校のイベント用にレーザー加工機で顔写真のスタンプ作ってみた.手近にあった消しゴムでやってみたらいい感じ.写真撮って左右反転して二値化してレーザーで焼くだけ.使ったのはこれ→ http://hotproceed.com/blaster.html新任の先生にイベントでやってもらうためにその先生の顔写真で作ってあげたので,現物も写真もなし.今度自分のスタンプも作ってみよう.
2013.04.09
コメント(0)
-

ちょっと頼まれ仕事でプログラミング中
音の強さをピーク値を表示するプログラムを作ってくれって頼まれて,寝る前にprocessingのサンプルを元に作り出したら,睡眠時間が減ってしまった.こんな感じ↓ あまりにそっけないのであとちょっと工夫しよう.
2013.04.03
コメント(0)
-
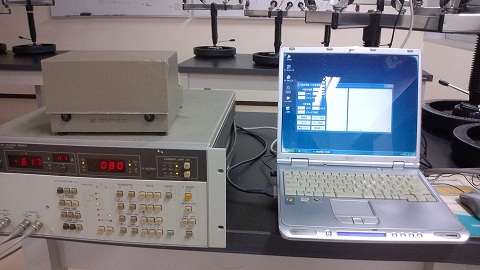
自動測定装置4140B,まだ現役
知る人ぞ知るYHPの4140B(pAメータボルテージソース).26年前にPC-9801とGPIBで接続し,自動測定プログラムを作った.17年ほど前にISAバスのWindowsPC用に書き換え.最近使ってなかったので,学生実験用で使うことにした.いまISAバスのPCなんてないので,PCカードスロットのGPIBインターフェースを使って,今日4時間ほどかかってプログラムを書き換た.上手く動いたので4140Bが壊れるまでは使えるです.
2013.04.02
コメント(0)
-
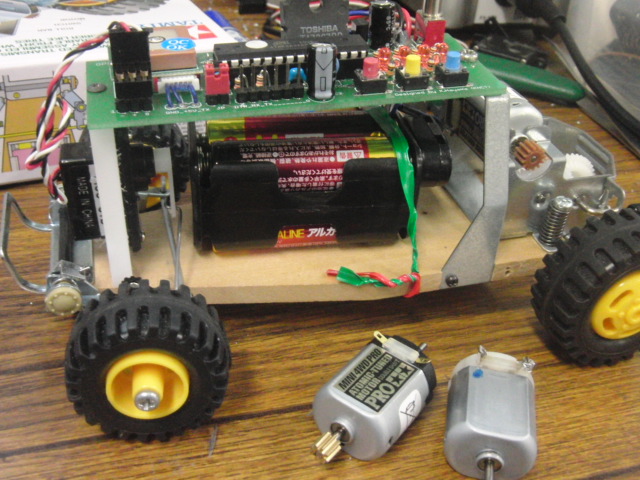
GPSロボットカーの教材,進展(追記と動画)
あとちょっとの所で止まっていたGPSロボットカーの教材について,(エントリーはこちら↓)http://plaza.rakuten.co.jp/cpu4edu/diary/201203210000/お尋ねがあったのでちょっと手を加えてみました.残ってた問題は,・モータドライバの内部抵抗が大きくてモーターが回りきれてない・速度がでないために,GPSの方位が正しく得られないの2点でしたが,モーターをミニ4駆のモータ(アトミックチューンモーター)に変えてみました.すると見違えるように力強く走りだし,速度も方位取得の問題も解決できそうです.こちら↓の性能比較だと,ノーマルモータのトルク10g-cmに比べて14g-cmあるそうです.http://www.tea-league.com/web/mot.htm近いうちに屋外試験をしてパラメータ調整してそれなりに走るようになったら,配布や工作教室などの活用の場を考えたいと思います.--追記--やっとそれなりに動くようになりましたので動画をアップします.GPSロボットカーキット,試走ウェイポイントを2箇所設定しており,蛇行しながらもウェイポイントに向かって走ります.ウェイポイントに到達すると一旦停止し,次のポイントに向かい最後は停止しています.簡単なプログラムですがこのままでも直進の微調整,舵角の比例値,舵角の最大値を適当に調整すればもう少し蛇行がおさまるはずです.プログラムで更に改善の余地もあります. 【あす楽_関東】タミヤミニ四駆PRO アトミックチューンモーターPRO◇01
2013.04.02
コメント(0)
全15件 (15件中 1-15件目)
1
-
-
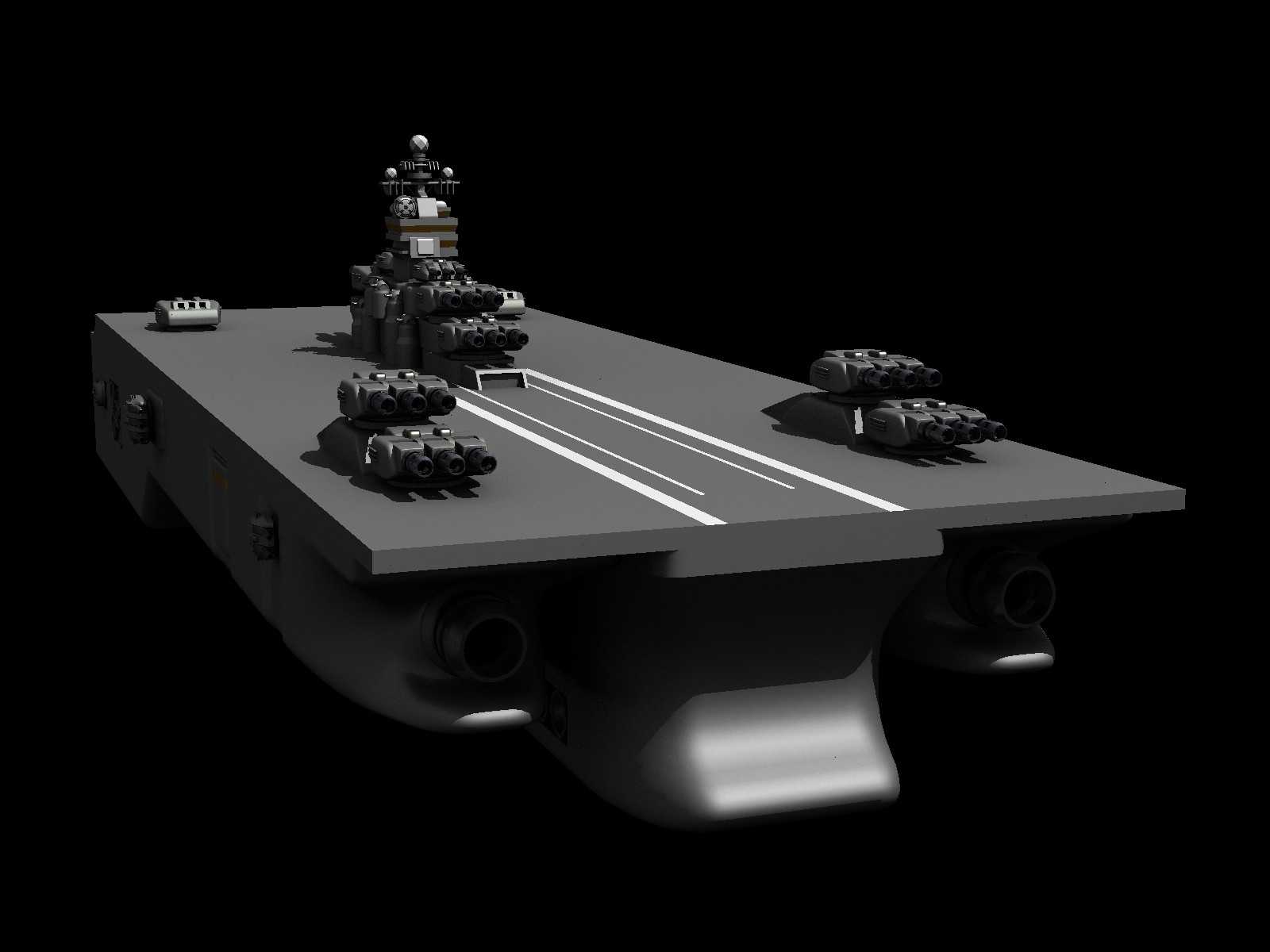
- 3DCG作品
- 新たな母艦を造る 19
- (2026-05-24 06:30:05)
-
-
-
- しんくぱっど
- E490のNVMe-ssdカード発熱の問題を解…
- (2026-05-01 07:03:11)
-
-
-

- アイフォン・アイポッドの必需品
- スティーブ・ジョブズの死に際に発し…
- (2025-07-14 03:41:24)
-



