

2011年06月の記事
全24件 (24件中 1-24件目)
1
-

卓上ファンの自作
空モノのラジコングッズが手元にあったので,モータとペラを適当にピックアップ.アルミの端切れを適当に穴あけ.昔使ってたJ-phoneのACアダプタなどを使って完成.窓際に設置すると,そよ風程度の風が来ます.【決算SALE!】★楽天カードご利用OK!★即納★【在庫あり】扇風機 USBに差し込むだけ♪ パソコンの起動に連動!USB卓上ファン(ブルー) JM-156-BLUE【卓上扇風機】
2011.06.30
コメント(0)
-
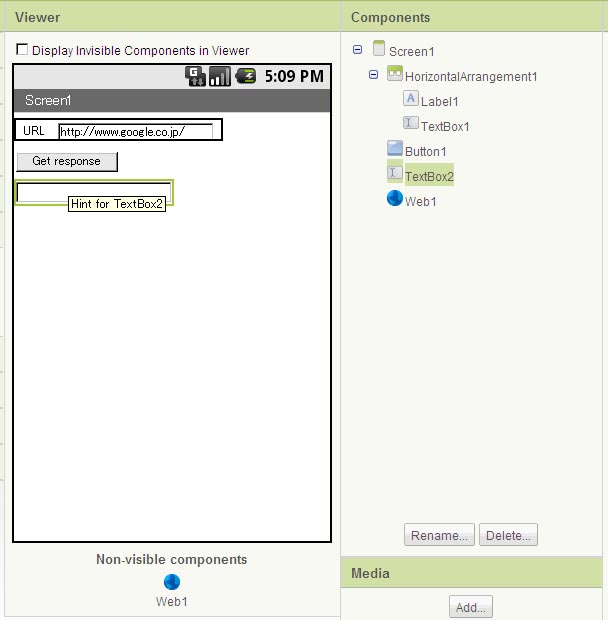
AppInventorサンプル追加
指定したURLからレスポンスをテキストに表示.App InventorサンプルApp Inventorサンプル2
2011.06.28
コメント(0)
-
ロボトレースの製作その9,ソフト作り始めました.(追記あり)
手始めに速度一定でセンターから外れると修正をかけるだけでゆっくり走らせてみた.その動画.でも,ちょっと速度を上げたら振動を始めてすぐに暴走した.単純なON-OFF的な制御だとかなり限界が低い.暴走の理由はブレーキがかかっていなかったせい.モータの速度をモニタして回りすぎたら逆転ブレーキをかけるようにしたら,動きが固いけどラインから外れにくくなった.ただし,速度(パルスカウント)やPWMの制御タイミングの最適化はこれから.現時点での固い走りの動画.
2011.06.27
コメント(0)
-
ブックマーク.
大和科学教材研究所http://www.daiwa-e.com/index.html
2011.06.24
コメント(0)
-
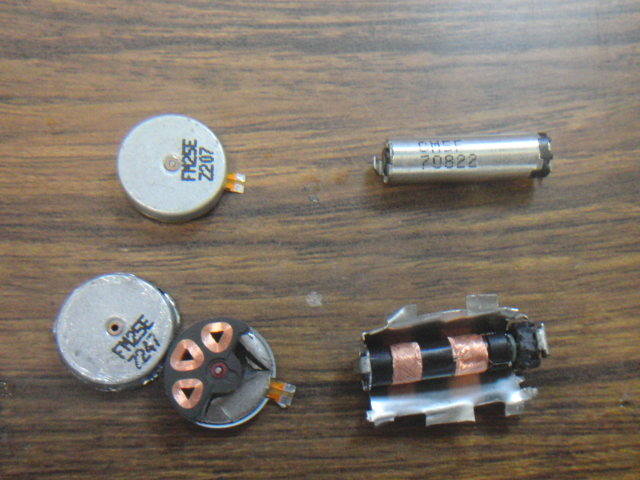
振動モータの分解
壊れた振動モータを2種類分解してみました.右の円筒状の振動モータは見えているコイルごと回りますが,軸のすべりが悪くなっていたようでした.左の円形の振動モータの壊れ方はひどいです.焼結した磁石が粉を吹いて膨れ上がりメッキがはがれて回転子が回らなくなっていました.
2011.06.24
コメント(0)
-
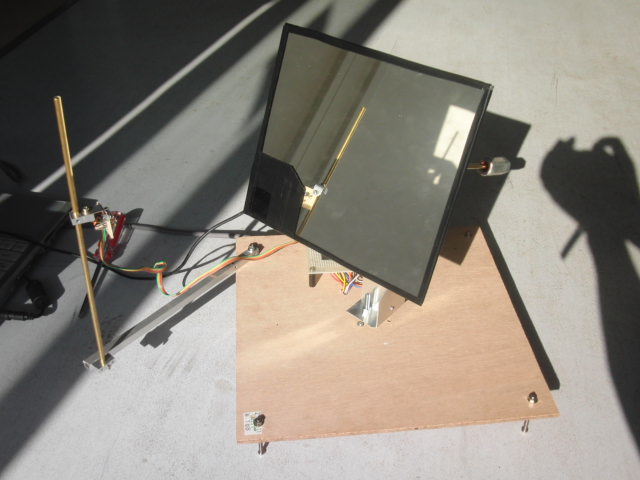
太陽光追尾装置で教室の中に光を!
前出の装置は,太陽光を追尾する装置です.物理の先生からのご注文で,光学の実験で鏡を使って太陽光を教室内に入れておくことができないか?とのことで,それをマイコン制御で作ってみました.太陽の当たる場所に設置して,太陽が動いても鏡の角度を変えて指定した方向に光を送り続けます.下の写真のように鏡の片隅に部分的にセンサ用のサブミラー(ビニールテープで囲った部分)を作り,サブミラーを受けるセンサの光分布がずれたときに修正をかけるように制御しています.センサ部分↓最初にサブミラーの光がセンサに当たるように調節すればあとはそれを維持してくれます.光がセンサーから外れてしまうと修正することはできませんが,太陽はゆっくりしか動かないので実用上は問題なし.構造上,ステッピングモータのステップ角以下での調整はできませんので近距離用.遠くに光を送る場合は,ギヤダウンが必要ですが,同様の構造でそれなりのものは作れると思います.太陽光追尾装置:鏡をずらしても自動で鏡が調整される動画.フリーページにまとめ
2011.06.23
コメント(0)
-
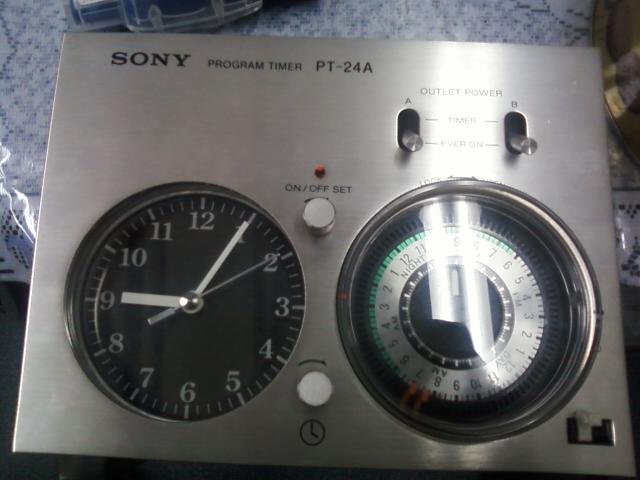
年代物のソニータイマー
これすごくないですか?かなり年代物です↓
2011.06.21
コメント(0)
-

ほっぺの光るムラタセイコちゃん
いいものもらいました.ほっぺの光るムラタセイコちゃん↓
2011.06.21
コメント(0)
-

鏡を使った工作
K先生のご注文で,鏡を使った工作中.詳細はできてから.--追記--最初に考えたハードは完成.しかし制御はかなり困難な模様.企画倒れか・・・?
2011.06.21
コメント(0)
-

春の新作!
誰でも作れるように挿入実装部品で,部品点数も面積も削れるだけ削って,それなりの性能のマウスが出来たと思います↓ あす某所でお披露目します.ハードが出来たばっかりでまったく調整できてないですが動き始めた動画
2011.06.17
コメント(0)
-

ブラックライト
ブラックライトを当てると郵便物のバーコードが浮き出てきます.昔そういう写真を撮っていたのを見つけたのでアップ.
2011.06.16
コメント(0)
-

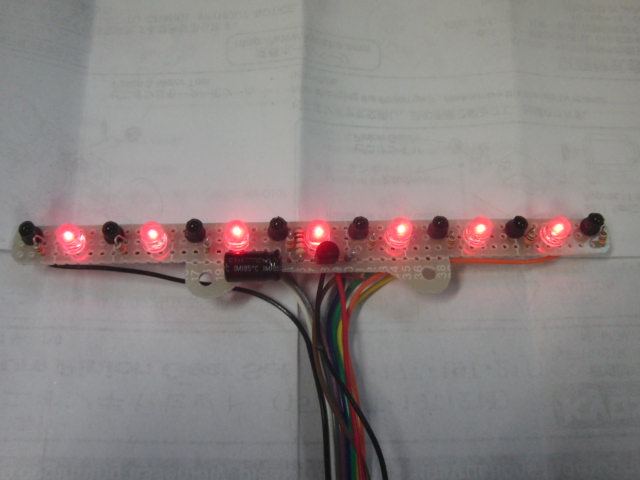
ロボトレースの製作その8,ハード完成
ハードウェア機能の確認まで終わり,エンコーダを逆に付けてたりモータを逆に付けてたりしたので修正して,やっぱりTA7291の電圧ドロップ(or内部抵抗?)が大きくてモーターのパワー十分に出なかったりしていますが,とりあえずハードは完成.ロボトレース,センサの動作チェックの動画.A/D変換で読み込み,しきい値を決めて対応する場所のLEDを点灯させています.
2011.06.15
コメント(0)
-
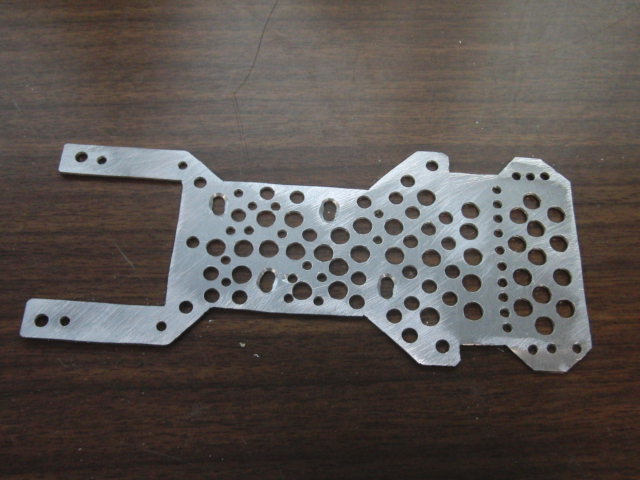
ロボトレースの製作その7,ボディの製作(追記)
現物合わせて目分量で適当な感じでAl板を切り出し,必要以上に強度があったので,穴をずぼずぼ開けて軽量化.曲げてモータやセンサ基板の仮止め.完成イメージはこんな感じ.センサの高さや角度はAlを曲げて調整するつもり.150gちょっとです.バッテリーはもう少し小さくても良さそう.さて,次に時間がとれれば配線してハードは完成できると思います.重量に比較して強力なモータとバッテリーを積んでいるので,スピードは出そう.でも問題はソフト.どこまで制御できるのか...回路にもちょっと不安があったりしますが,考えないことにしておきます.--追記--配線完了.安全のためにモータへの電源スイッチをつけたら重量増になってしまいました.軽いバッテリーに乗せ換えたら146g.寸法はW:135mm,L:110mm,H:35mm(突起部含まず)
2011.06.14
コメント(0)
-
設計ミスのもよう・・・
くじけず続けてみる!
2011.06.13
コメント(0)
-
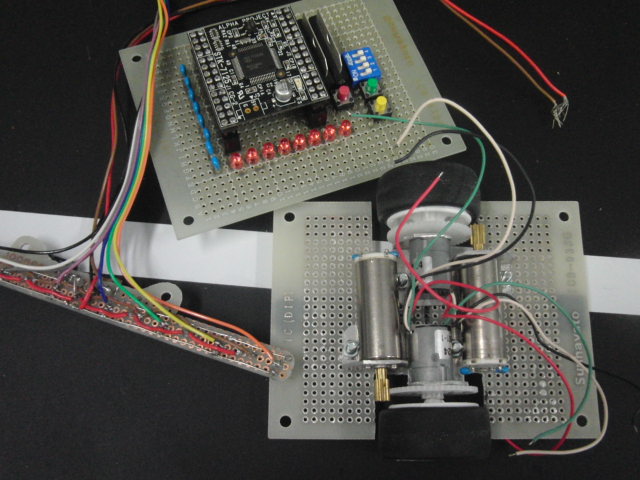
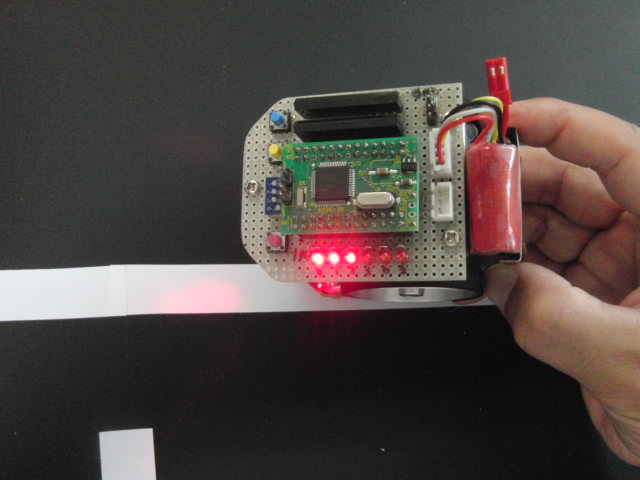
ロボトレースの製作その6,メイン基板作製中
重心は高くなりますがステアリング無しで小回りが利くように2枚重ねることにしました.メイン基板は主要部品をできるだけ詰めて配置し,チップ抵抗を裏面に使ったりして省スペースします.--追記--ボードの書き込みとLED点灯だけはできました↓
2011.06.13
コメント(0)
-
ロボトレースの製作その5,センサ基板
8個のアナログセンサを左右のマーカーの幅まで均等に並べて,その間に光源を置いてみました.こんな感じです↓重心から離れたところで振り回されるので,軽めに作って10gでした.だんだんと形が見えてきました.
2011.06.10
コメント(0)
-
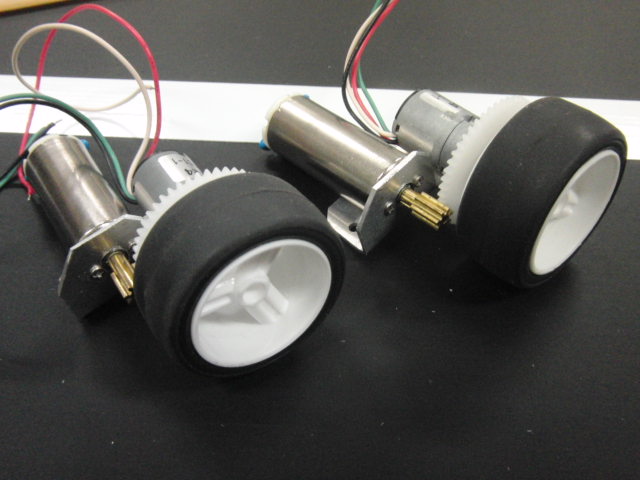
ロボトレースの製作その4,足回り
現物あわせで適当にアルミ板を曲げて穴あけて作りました.さてどんな風に組合わせようかな.アルミでベースを作って組む? 基板を2枚重ね? 広い1枚基板で作るか?
2011.06.08
コメント(0)
-

子どもが体験するべき50の危険なこと
ブックマーク.【送料無料選択可!】子どもが体験するべき50の危険なこと Make:Japan Books (単行本・ムック) / GeverTulley/著 JulieSpiegler/著 金井哲夫/訳
2011.06.07
コメント(0)
-
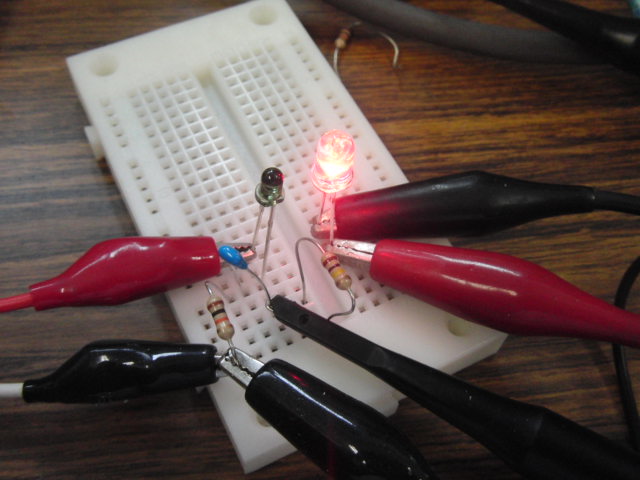
ロボトレースの製作その3,センサの考察の続き(追記あり)
テスト回路はこんな感じで簡単に.フォトトランジスタを横に並べてアナログ値でラインの位置検出をしようと思ったのですが,スポットが小さくて検出範囲が狭すぎるので...カットして磨いてみました.研磨は歯磨き粉使用.無指向性の光源になりました.想定どおり!--追記--これだけ作りました.--追記2--LEDを7個同時に点灯する回路のテスト.全部並列でも問題なく点灯.波形:前に白い紙を置いたとき.波形:前に何も無いとき(横からの光を受けて小さな信号がある)
2011.06.06
コメント(0)
-
40万アクセス.
趣味と仕事とごっちゃまぜのブログですが,今後ともよろしくお願いいたします.
2011.06.06
コメント(1)
-

Arduino-tiny
ブックマーク.http://code.google.com/p/arduino-tiny/【送料無料】Arduinoをはじめよう
2011.06.05
コメント(0)
-
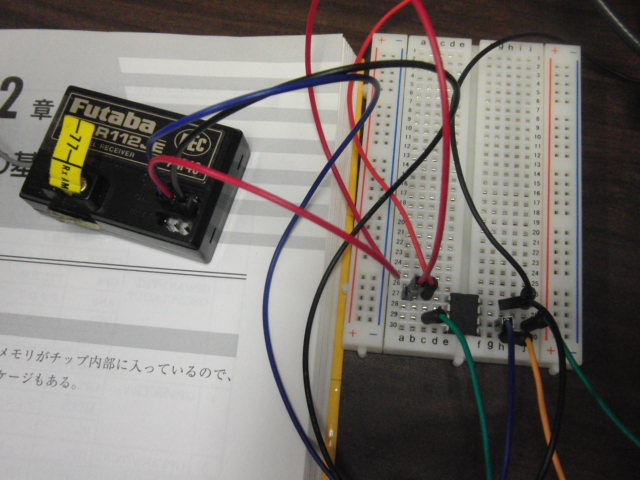
PICを使ったRC信号の有無の監視
クルーレスソーラーボートの制御はArduinoを使おうと考えています.RCによる強制制御が必要なので,RC受信機の信号をpulseIn関数で監視しようとすると,パルスがない場合は設定したタイムアウトまで制御に空白がでることになります(20mSくらい).GPSの読み取りやジャイロによる角度検出に支障がでるので,別に8ピンPICを搭載してPICにRC受信機の監視をさせ,RCの受信の有無だけをArduinoに伝えることで制御に空白がでるのを防ぐことが出来ます.こんな感じでFUTABAの受信機から信号を8ピンPIC12F675に入力.FUTABAのRC送信機の電源OFF,受信機の出力なしの場合.オシロの上が受信機の信号,下がPICマイコンの監視結果でLレベル.RC送信機の電源ON,受信機の出力ありの場合.オシロの上が受信機の信号,下がPICマイコンの監視結果でHレベルの変化.別メーカ(JR)のRC送受信機でも実験.送信機の電源OFFでも,どういうわけか受信機は不安定な出力.でもPICマイコンでは正常な受信がないとしてLレベルを出力.プログラムについて,Hレベルのパルス幅とLレベルのパルス幅をそれぞれ監視し,正常なパルス幅でHとLレベルが5回以上繰り返して検出された時にRC受信したと判断しています.FUTABAのRC受信機の信号監視の動画JRのRC受信機の信号監視の動画プログラムはフリーページにあります
2011.06.02
コメント(0)
-
ロボトレースの製作その2,センサの考察
他の方のロボットを見るとセンサは基板の裏側に下向きに取り付けられているのが一般的なようです.センサはアナログ,デジタルどちらもありのようですが,デジタルにすると読み取りが簡単で確実な半面,しきい値調整用のボリュームが必要になります.一方,Ng Beng Kiatさんのページ(http://www.np.edu.sg/alpha/nbk/)で,Micromouse->Ning3 を見ると,センサが本体より崎に出て前を向いています.これでラインがちゃんと認識できるのかが疑問で,実験してみました.前に作ったマイクロマウスの左前の赤色LEDによる反射型のアナログセンサを使って白線の読み取りを行ってみました.以下写真2枚はマウスを少し持ち上げ,斜めに白線に光を当てて白線の検出をしています.白線上の場合↓白線外の場合↓周囲の明るさについては,白熱電球なら至近距離で当てても影響ありませんでした.というわけで,マウスで使った回路をそのまま利用しても良さそうですし,至近距離なのでOPAMPも省略していいかもしれません.(アンプとボリュームの在庫もないので好都合!)こんな感じで手持ちの部品で作ってみることができそうです.ロボトレース用光センサの実験の動画広告↓【送料無料】ライントレースロボット入門
2011.06.02
コメント(1)
-

Arduinoでステッピングモータを回す方法.
位置決めして回すならStepper関数を使えば良いのですが,回っている間処理が中断されるので,MsTimer2によるタイマー割り込みを使って回してみました.最少間隔の1mSでタイマーをかけて回しても,1秒で1000パルス,5回転/秒位でしかまわりません.もう少し早く回すためにMsTimer2をもとにもう少し早いタイマー(数100μ秒)のタイマーを作って回してみました.以下その手順:ハードウェアライブラリ中の MsTimer2 をコピーして名前をMsTimer1に変更その中のTimer2をTimer1に検索置換. ISR(TIMER2_OVF_vect) はそのまま.CS22,CS21,CS20とプリスケーラ(prescaler) も変更.tcnt2の値を直接書き換えたりして・・・スケッチ中でも,MsTimer2 を新しく作った MsTimer1 に置換.oファイルを消してコンパイルすると早いタイマーが動いた.結果早くなることはなるのですが,変な振動をして回転数のわりに脱調しやすくなりました.どうも処理がおいついてないようです.その動画
2011.06.02
コメント(0)
全24件 (24件中 1-24件目)
1
-
-

- 花、風景の写真を撮るカメラとレンズ
- ★ヤフオクでSONYデジカメを落札、同機種4…
- (2025-10-04 17:30:05)
-
-
-

- ジャンクパーツ
- 秋原他でのお買い物250111ハーフその…
- (2025-02-15 18:03:22)
-
-
-

- 新製品発売情報・予約情報
- 喜怒哀楽by増田貴久
- (2025-02-14 15:21:13)
-



