

2011年11月の記事
全19件 (19件中 1-19件目)
1
-
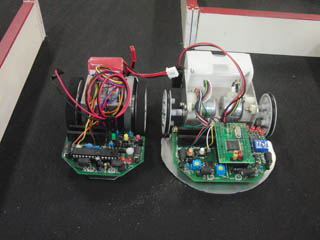
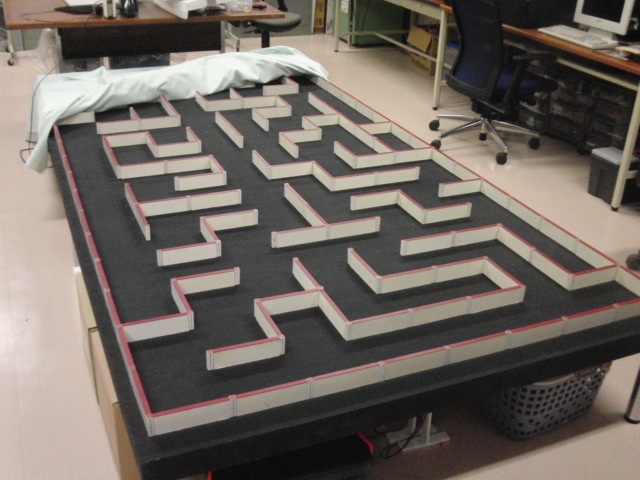
展示用に調整迷路を真っ二つ.
教材用に作ったとH8とArduinoのマイクロマウスをMTM07に持って行きます.最初に作ったカラーボードによる調整用迷路.展示用に持って行こうと思い,真っ二つに.これで小型のソフトキャリーバックに収まりました.
2011.11.30
コメント(0)
-
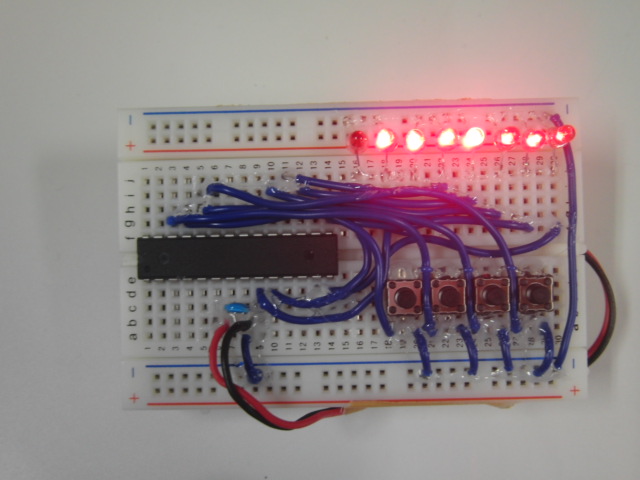
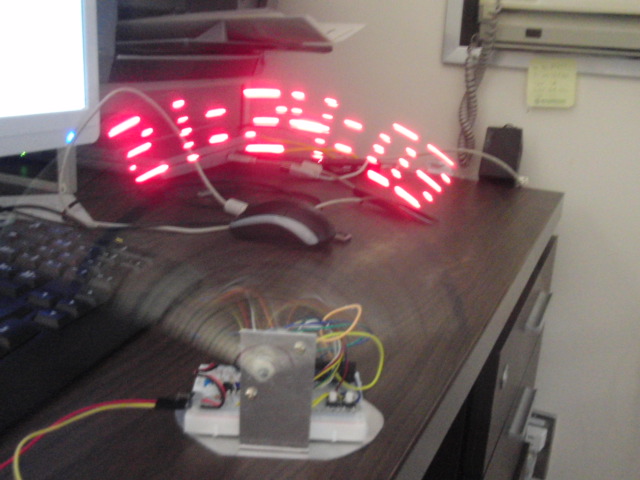
残像でLEDディスプレイ
週末は仕事持ち帰りそこねて手元にあるものでちょっと頭の体操.前に作った8x8LEDマトリクスによる電光掲示板のプログラムをちょっと改造して,こんなのを作りました.製作とデバグで3時間.表示させてみるとこんな感じ↓ シャッタースピードを落として撮影しています.もちろん前と同じで,PCを使わずに4つのスイッチで文字列の入力保存ができます.-追記-回路図も入れてまとめのページを作りました.残像LEDディスプレイ-追記2-hexファイルのダウンロードと書き込み方法について追記しました.
2011.11.28
コメント(0)
-
RXマイコンはいかがでしょう?
マイクロマウスの世界でトレンドはSTM32へ移行しつつありますが,おじさんには移植の労力と新しい開発環境になれるだけのパワーがないので,ここはK峰さんお勧めのルネサスのRXマイコンで行こうかと思います.秋月さんでは,ルネサスRXマイコンR5F56218BDFPがありますが,100ピンのLQFPでハーフマウスには少々大きすぎる感じ.http://akizukidenshi.com/catalog/g/gI-04713/ルネサスのページでは,”RX62Tグループは、最大100MHz動作の高性能により、モータ制御に最適な設計としたマイクロコントローラです。”とあり,パッケージも64LQFPのものがあるとのこと.http://japan.renesas.com/products/mpumcu/rx/rx600/rx62t/rx62t_root.jspDigikeyではR5F562Tで検索するといろいろでてきます.ROMもRAMも今使ってるSH7125より多く,低消費電力で,電源電圧も3.3V,5Vの両方選べます.http://search.digikey.com/scripts/DkSearch/dksus.dll?vendor=0&keywords=R5F562Tマニュアルを読んでRX62Tの64LQFPで問題なければ,次のハーフマウスはこれで作れないかと考えています.
2011.11.26
コメント(1)
-
App InventorでAdvent Calendar
こういうのがあるらしいです↓ 参加してみます.皆さんもどうですか?日本App Inventorユーザー会 Advent Calendar 2011
2011.11.26
コメント(0)
-
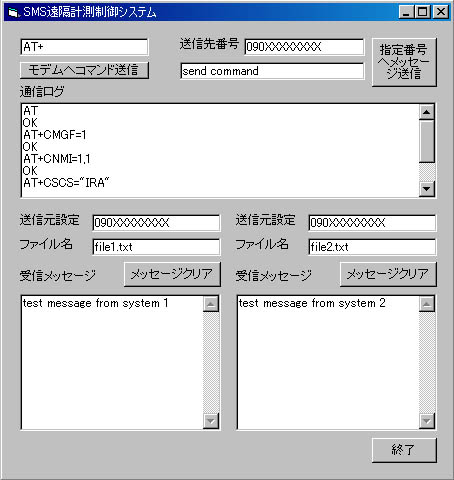
3GモデムRooster-A800でSMSを受信してPCで読み出すシステム
以前に書いた,SMSモニタリングシステムの観測結果を,もう1台の3GモデムRooster-A800でSMS受信してPCで読み出すシステムを作りました.指定した端末(2個まで)からメッセージを受信し,別々にファイルに記録できます.また,モデムへATコマンドを送信したり,指定した番号にSMSを送ることができます.
2011.11.25
コメント(0)
-
maxonのモータ
マイクロマウス大会でマクソンのモータが意外と安く購入できることを聞いて考え中.エンコーダ付のRE8で無難に走れるハーフマウスを作っておいてもいいのかもしれない.と思ったけどよく調べたらケーブルがフレキだった.一つ上だとRE13なので,これでハーフは大きすぎかな.やっぱりハードは作らないべきか...
2011.11.24
コメント(0)
-
マイクロマウス大会2日目
九州地区シードをいただいていたので,クラッシックの決勝に出たのですが,結果は照明でセンサが不安定になり,1走目は途中でリタイヤ,2走目は重ね探索でなんとか探索の途中でゴールに行ったところで中断.通った範囲での最短は求まっていたようなので,3,4,5走目は最短にトライするものの,スリップしていたようでスラロームの途中で壁に当たりリタイヤ.スラ探がぎりぎりできていたので,ターンの速度は上げずに,無難な速度でなら最短を走れたかも,と後で思ったりもしましたが,結局その程度の出来だったということです.まだまだですね.センサの不安はあったのですが,やっぱり出たかという感じ.ハードでセンサとオペアンプの間の直流カットのキャパシタが大きめの値を使っているのでそれが照明の明るさの変化を拾ってしまっていました.奥まったところにあるので壊すのを恐れてそのままにしてました.センサの読みで2-3ほど値がふらついて,走行中の壁との距離が不安定になり,横壁のしきい値が低めに設定してあったので,ところどころ読み間違えていたようです.このままでは決勝は無理なので取り替えます.ロボトレースの決勝を見て思ったことは,自分のトレーサーもポテンシャルはそれなりに持ってそうです.タイヤのグリップを上げて探索速度を2割くらいあげれば予選通過ラインだったし,決勝進出者の直線スピードと比べても自分のトレーサはそん色ない速度は出せるし.約15cmリニアにライン位置を検出するハードは他にはないし,ソフトを詰めれば面白い走り方ができるかもしれません.来年はソフトに専念します.ハードはどれもそれなりのポテンシャルはあると信じて.
2011.11.22
コメント(0)
-
マイクロマウス大会1日目
ロボトレースの不具合は根本的な問題でその場ではなんともなりませんでした.結果は無難な速度で探索走行はできましたが,加速走行は出来ず予選落ち.でも,いろいろな人に話を聞けましたので何をどうすれば良いかが分かってきました.
2011.11.19
コメント(0)
-
明日からマイクロマウス大会
ロボトレースの試走で分かったこと.自分の作ったコースには,直線と半径10cmのターンしかなく,それらにしか対応してなかったので,半径15cmのターンは直線とみなして加速しコースアウトしてしまうというおそまつな話.試走コースは一つしかなく,待ち行列ができていて試走することも難しい.なので,プログラムを考えながら修正しただけで明日の本番.どうなることか.マウスは決勝の強い照明でもセンサが耐えられたことだけを確認して終わり.こちらも決勝常連のエキスパートが並んでいて,自分のマウスをトロトロ走らせられる雰囲気ではなかったのです.
2011.11.18
コメント(0)
-
つくばチャレンジ,トライアル195mでリタイヤ
残念ながら.
2011.11.15
コメント(0)
-
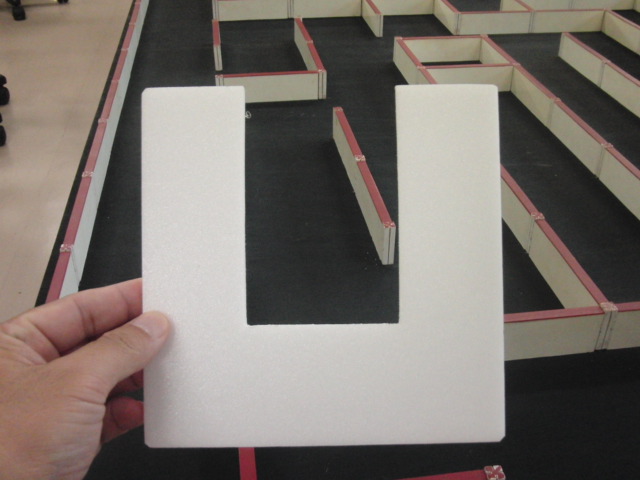
発泡スチロール板工作
こんなの作りました↓こうやって使います↓本当は黒がよかったんだけど,手持ちがないからしょうがない.
2011.11.13
コメント(0)
-
マウス終わったかも
モータ片側壊れたかも.どうなる?-追記-モータが片側だけ妙に抵抗が大きい状態に.左右で同じように回って欲しいマウス用途には使えません.単独での用途には使えるかも.今使っているのは,Faulhaber 1717T06SR IE256もう1台作れるように2個予備があるので1個交換しました.ギヤの噛み合わせを調整するのに1時間くらいかかり,本当は2個同時交換のほうがバランスが取れるんだろうけど,もう片方も同じように調整できるか不安なので今うまく回ってるものをバラす勇気がありません.1個残りでは使い道がないので,モータ買い足します.素直に同じ Faulhaber 1717T06SR IE256 をもう1個買うか.それとも, Faulhaber 1717T06SR IE512 に変えるか,それとも, Faulhaber 1717T03SR IE512 3Vに変えるか.どれがいいんでしょう?-追記2-ギヤの噛みあわせがいまひとつのようで,低速で蛇行します.引っ掛かりがある正だと思います.これ以上いじると悪くしそうなのでやめます.そういう気がするのは,心に折れかけているせいでしょう.本番は運しだいかな.
2011.11.12
コメント(0)
-

ロボトレース進捗
2件模型屋を回ったのですが,ミニ4駆用のグリップの良いタイヤが見つからず.しょうがないのでスポンジでも切ってタイヤを作ろうかと思ったのですが,その前にちょっと小細工.こんな風にヤスリで削って新しい面を出してより扁平に加工.するとグリップが倍くらいに良くなって,無難に走るようになりました.その動画ロボトレースの目標は予選通過.
2011.11.12
コメント(0)
-
マイクロマウス進捗
ここ数日の夜はマウスの作業に当てて,ソフトは前よりは賢くなりました.といってもやっと重ね探索と全探索ができたくらい,斜めと直線の重み付けを変えて最短経路を計算できたけど,自分のマウスは斜めはほぼクラッシュなのであんまり意味がありません.一昔前くらの速度にはなりました.その動画.これ以上速度は自分には無理っぽいのであきらめて,次は斜めのパラメータを取り直し.-追記-斜めのパラメータが一つ取れました.その動画.今の機体とソフトと気力の限界.これ以上は早くならないので,探索と最短の自律化をめざします.来週は出張で迷路上の作業ができないのPC上でこつこつ作業します.
2011.11.10
コメント(0)
-
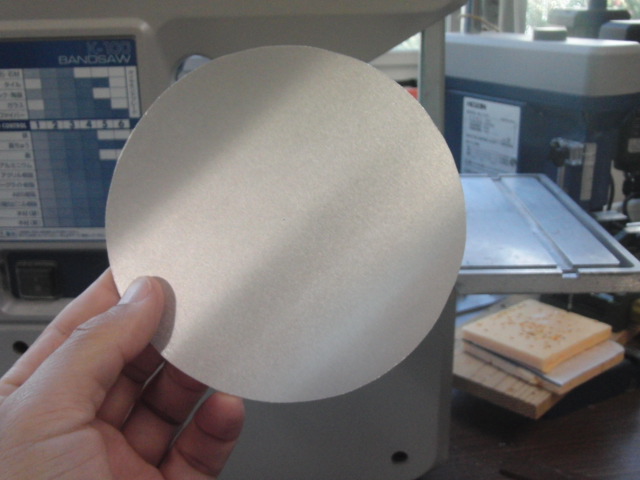
グランドプレーン
GPSロボットカーコンテストに参加して,GPSの精度が悪いなりに,プログラム通りの走りができました.そこでグランドプレーンがあった方が良い,といわれたので帰って早速工作.1mmのアルミ板を円形にカット↓こんな風に設置しました.次回はこれで完璧かな?-追記-GPSロボットカーコンテストの結果が公表されました.こちら↓http://www.gnss-pnt.org/symposium2011/robocon.html
2011.11.07
コメント(0)
-
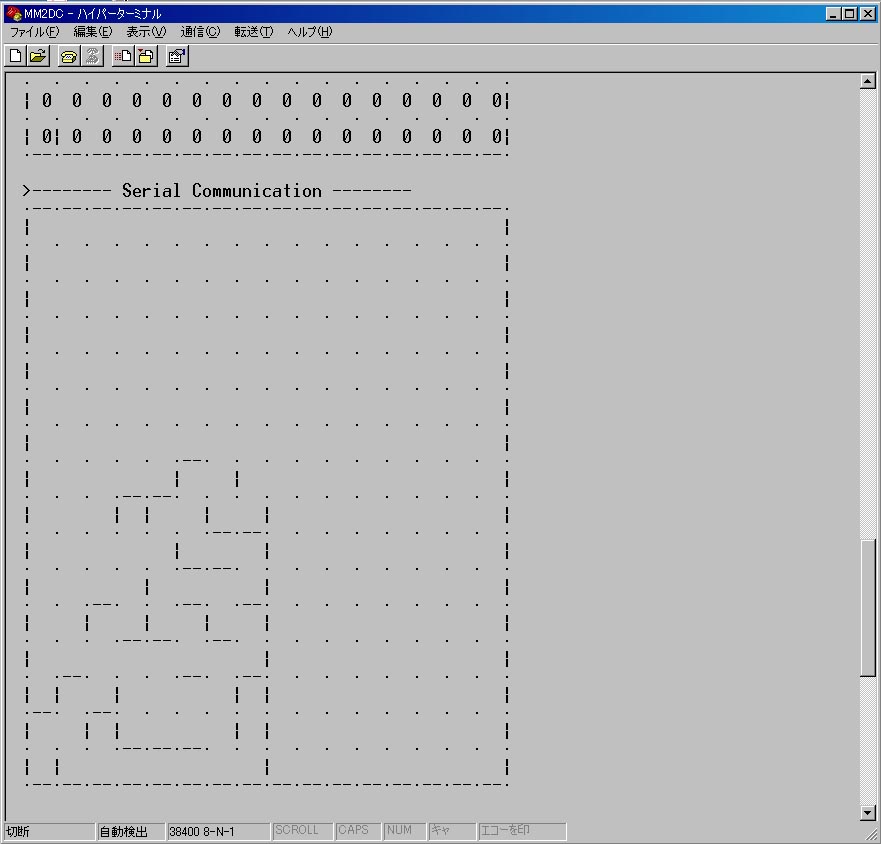
いまさらなんですが・・・
マイクロマウスのソフトは最低限しか書いてなかったし,デバグはひたすら頭で考えて,パラメータ調整はそのたびプログラムに書き込んでたわけですが,これだと開発効率が悪すぎなので,せめてシリアル通信くらい載せようと思って作り始めました.つくばチャレンジとマイクロマウスの両方参加すると1週間ほどホテル住まい,迷路での調整機会はあまりないのでソフトで精度を上げて迷路の依存性を下げたいと思います.
2011.11.04
コメント(0)
-

緊急充電器
家の都合で大型ホームセンターへ.そこで見つけました.緊急充電器,値段はなんと5円. 単三2本をUSBで5V±0.25V出力に変換.フタを開けるとこんな感じで基板が入っています.表はUSBコネクタとコイルとコンデンサ.基板の裏に昇圧回路.電池を入れると5Vちょっと出てました.電池ボックスとしても5円は安いし,3V→5Vが5円としても安いので,20個ほど大人買い.それでも100円でした.
2011.11.03
コメント(2)
-
調整モード
今度こそはがんばろう.
2011.11.01
コメント(0)
-
残像LED時計
昨日の実験で作った回路を壊すのももったいないので,そのままブレッドボードに移して,プログラムを作って時計にしました.バーの動きに加減速を加えて脱超しにくくしましたが,5Vでは速度に限界があり,速度をあげるには電圧を上げるしかなさそうです.バーを長くしてなんとか時間が読める程度にはなりました.夕方から遅くまでかかってしまったので予定がまた先送り...こちらに,LED時計の動画-追記-研究室前のオブジェが増えました↓
2011.11.01
コメント(0)
全19件 (19件中 1-19件目)
1
-
-

- アイフォン・アイポッドの必需品
- スティーブ・ジョブズの死に際に発し…
- (2025-07-14 03:41:24)
-
-
-
- しんくぱっど
- 【続】X1 Carbonの電源ボタンが機能…
- (2025-10-19 19:42:00)
-
-
-

- ブログ更新しました♪
- 11月25日 記事更新致しました。
- (2025-11-25 17:23:31)
-



