

2009年08月の記事
全26件 (26件中 1-26件目)
1
-
DCハーフサイズマウスonユニバーサル基板,ソフト進捗
ソフトを少し作った分の動画です.90度旋回180度旋回Uターン走行(まだまだパラメータ調整必要)斜め走行(狭いところを上手く抜けてます)
2009.08.31
コメント(0)
-

Wパクリ作戦決行!
積むの止めようかと思いましたが,新参者としてはウケ狙いも大事なわけで,Wパクリ作戦決行することにしました.(4輪はWさん,吸引はYさんのパクリということで)吸引はここに積みます.削り込んでなんとか入るようになりました.後ろから見るとこんな感じ.ここから強力なジェット噴射で加速します!?裏から見たところ.上手くシールできるでしょうか.ところで電池は・・・?上に載せるしかありません.いいんです,重心が上がる事よりパクリの方が大事です.ちょっと仕事がたまってきたので,あれこれ片付けてから工作します.
2009.08.28
コメント(0)
-

大会準備もしないと・・・
九州地区大会が本校で開催されます.今年は,校舎改修とかなんとかで,場所の確保も大変です.そろそろ準備を始めないと,と思っていたら,注文していたセンサが来ました.ハーフの柱に設置します.上手に穴あけしないと.でも今年は旋盤とかボール盤とかあります.ちなみに去年の様子はこちら.ハンドドリルでした.
2009.08.28
コメント(0)
-

mice
なんだか増えてきたので記念写真.凝り性なので,始めると飽きるまでやります.そろそろ作るのセーブしないと中途半端なものが増えるばかり.今年はハーフの基板を作るのはやめて,ソフトに集中した方がいいのかな.
2009.08.28
コメント(0)
-
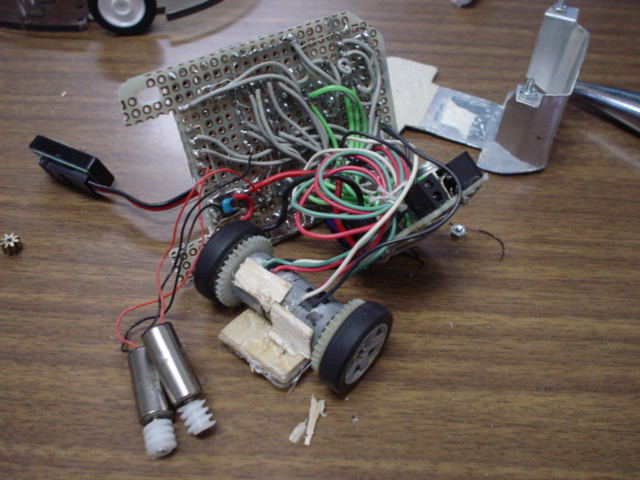
DCハーフサイズマウスonユニバーサル基板,足回り改造
スラローム走行させようとしたらどうしても上手くいきません.1相エンコーダのため原理的に逆転ブレーキをかけることが難しく,旋回半径が大きくなって迷路を曲がることが不可能でした.どうがんばっても旋回半径が大きくなってしまうスラロームの動画.なので足回りの大改造.ウォームギヤに変えて機構的なブレーキをかけます.まずは解体,ピニオンを交換.穴はアルミ丸棒を使って径変換.垂直にモータを固定するには,バルサの木工作.バルサもバカにしてはいけません.瞬間をしみこませて固めれば,りっぱなFRP.(バルサファイバーレインフォーストプラスチック)再び組み立て.こんな具合に完成.最初からこうすればよかったのかも.足回りの大幅変更で,機体の特性が大きく変わってしまいました.パワー制御のプログラムは大幅に作り直し,前のPI制御では上手く行きません.カクカクになります.パワー伝達が遅くフィードバックが強すぎです.フィードバックをゆるくすると滑らかにはなるのですが,ハーフの迷路を走る機敏さがありません.その中間的な制御は整数型でプログラムを作っているためできなくて,細かに実数計算するか,変則的な制御をするしかないようです.こんな感じでガタガタ言いますの動画.取りあえず,スラローム性能がちゃんと出るかだけ確認しました.スラローム動画.--追記--今日は家でプログラム.いろいろ試しましたが,結局一番シンプルなP制御でパラメータ調整をした場合が最も良かったです.いろいろ作った補正プログラムはズバッと削除.プログラムも見やすくなりましたし,計算速度も早いはずです.スムーズに動くしピタッと止まるしくるっと回るようになりました.あとは,ステッパーマウスで作った分の移植は時間の(作業の)問題です.後はこのマウスで数区画使ったトップスピードまでの加減速と加減速途中のターンを上手く作れれば,ノーマルマウスの方もやっと目処がつきます.(実はそこが競技としてのスタート地点のようですが)
2009.08.28
コメント(0)
-
最後の改造
DCハーフマウス,やっぱり足回りがダメなので限界です.最後の改造を試みました.ソフトも取りあえずPIDってのはこの場合は当てはならないらしい.結果は明日.
2009.08.27
コメント(0)
-
DCハーフサイズマウスonユニバーサル基板,ジャイロ搭載の効果
ジャイロの効果がありました.これまで壁に引っかかって旋回ミスがあったらどうしようもなかったのですが,ジャイロでリカバリ効きます.パラメータの調整が必要ですが危なっかしくもなんとか走れてます.ジャイロの効果の動画
2009.08.27
コメント(0)
-

DCハーフサイズマウスonユニバーサル基板,ジャイロ搭載
ユニバーサル基板にテスト用に作ったDCハーフサイズマウスをなんとかするために,ジャイロを搭載してみました.上手くいけば回転角度を安定化できるはず.ジャイロは,近藤科学のKRG-3,二足歩行ロボットKHR-2HVに載せていたものです.電源,GND,信号線をつなぐだけ.ちょうど電池の横に縦置きで搭載できます.というわけで,ばらして工作.(外して再利用できるようにケーブル長めに引き回し)搭載完了↓↓↓プログラムを組んでジャイロの動作確認をしてみると,線形性も良いようです.360度手で回して,逆回転してまた戻してもおおよそ元の角度で出力が0に戻ります.ジャイロ動作確認の動画これでも何とか走れるかも・・・KRG-3 ジャイロセンサーKRG-4 ジャイロセンサーグラスロードカンパニー
2009.08.26
コメント(0)
-

DCマイクロマウス動き始めました.
少しずつ進んでます.回路をチェックして電源を入れて,各部の動作をチェックして,配線をちょっと変えたり,プログラムを作ったりしました.とりあえず,センサの動作確認エンコーダの動作確認スピード計測の確認定速前進1ステップ前進(調整必要)右90度ターン(中心ずれる)左90度ターン(中心ずれる)180度ターン(中心ずれる)までできました.あとはプログラムしだい.--追記--ジャイロ動作確認(オフセットずれる)Uターン走行(壁に近づきすぎた時だけ離れる制御)いろいろハード上の問題が出てきました.左右センサの発光出力が弱く左右の感度が悪い.FETドライバを焼いた?リポ電池が痛んできて電圧安定しない.ジャイロのオフセットが気になる.直進時に若干左に曲がる.左右バランスの機械的な不具合?重心?タイヤがやわらかいのですべりが悪く,スムーズな旋回ができない,など.取りあえず迷路を走るところまで一通りプログラムを書いて,その後ハードの改善をしようかと思います.また”つくばチャレンジ”のソフト作りが先送り・・・--更に追記--今日もちょっとソフトを作りました.旋回性能については,高速化することで少し安定しそうです.旋回や直線走行でピタッと止めるためのプログラムを作成中です.
2009.08.24
コメント(0)
-

光線反射・屈折試験器で自由研究
夏休み! といえば自由研究. (”研究”と言う言葉は最近自分の中では暗いイメージですが.)"光線反射・屈折試験器"なる箱が捨てられていました↓土を入れてアリンコを大量に投入.最初の数日は何も起きなかったですが,今日見たら(4日目くらい)巣作りを始めてました.アリの巣観察でふしぎ発見アウトライド アントクアリウムM-1アクアアカデミック[1070M-1アクアアカデミック]【知育教材・観察・蟻の巣】大人も子供も夢中!自然の不思議を体験しよう!アリさんと一緒に思い出作り♪当店でも大人気の商品です☆子供用自由研究キット アリ伝説
2009.08.21
コメント(0)
-

ハーフマウスのタイヤ1個削りました.
ヘタレなので丈夫な方のエンコーダ直結で作ることにしました.今回もハーフは参加することに意義がある!ということで.そうするとタイヤの径が大きくなってしまうので,アルミから削りだしました.削ってみて分かったのですが,手持ちのバイトではこのサイズのこの形の削り出しに無理があって最後は手作業で均してなんとか完成.あと一つ作るのは気が重い・・・--追記--今日(8/21)もう一つ削りました.見栄えを気にしなければ,結構早く削れました.
2009.08.20
コメント(0)
-

UTM-30LX
つくばチャレンジのロボットに,貸し出しして頂いたUTM-30LXを取り付けました.あとゼッケンも4方向に貼り付け.
2009.08.20
コメント(2)
-
トップページをちょっと改変.
トップページの本を半分入れ替えました.たまには入れ替えたほうがいいかも,と思って.
2009.08.20
コメント(0)
-

つくばチャレンジのロボットちょっと改造
昨日の半田付けで散らかってソフトを作る感じではなかったので,つくばチャレンジのロボットをついでにちょっと改造.といっても,これまでコネクタを抜き差しして動かしていたところにスイッチをつけました.実はメインスイッチもなかったのです.こんな感じ↓
2009.08.19
コメント(0)
-
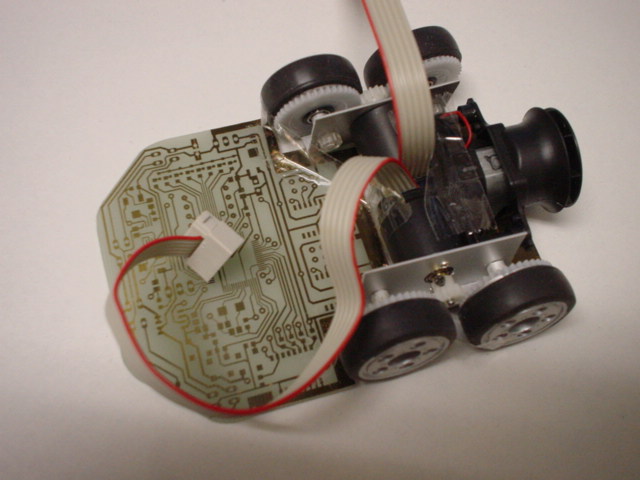
形だけできました.
こんな感じで形だけできました.再度配線・導通を調べ終わったら電源を入れてみます.裏面はこんな感じ.電池は空いたところに適当に積もうと思ったのですが,どうやら甘かったようです.ここに置けば収まりはいいのですが,ケーブル長が足りなくて延長が必要.でもここには,コレ↓を置こうと思ってたのですが・・・電池を置き場所も含めていろいろ探してみます.
2009.08.18
コメント(0)
-
今日はここまで
半田付け半分くらい終わった.
2009.08.17
コメント(0)
-
盆休みは読書
盆休みは読書.といっても専門書と嫁さんの実家にあった少女マンガ.学校は夏休みなので今日から電子工作全開!
2009.08.17
コメント(0)
-
DCマウスも表面実装も初心者なので・・・
作ってみないと動くかどうかわかりませんが,こんな感じで学生さんといっしょに製作中↓
2009.08.12
コメント(0)
-

お尻かっつんは結構効くので・・・
前に作ってみて限界を感じてたDCハーフサイズマウス(分解能低い1相エンコーダ,足回りとモータのバランス悪し)の角度調整にお尻カッツンを入れてUターン走行をさせてみました.動画はこちら.もうちょっと調整すれば,完走は無理としても小さな迷路でのデモ走行用にはなるかも.
2009.08.11
コメント(0)
-
今日は朝から旋盤いじり
触ったこと無かったギヤいじった.ねじ切り用のバイトがちょっとしたことでかけてしまってて,ねじ切りは試せなかったが,ギヤの入れ替え方法と,送りスピードがいろいろ変えられることが分かった.あと,プロクソンのカタログを見ながら考え事.どうすれば安く加工のバリエーションを増やせるか.いつも目分量で現物あわせだけど,少し工具を買い足せばピタッと合う物ができるのかな?
2009.08.11
コメント(0)
-

ITRON(HOS)でもマイクロマウスやってみます.
図解μITRONによる組込みシステム入門を買って読んで,本の通りに試してみようと思ったら,本で紹介されているリアルタイムOS smalightは有償でした.価格を問い合わせ,購入資金繰り中.もう一冊,ITRONとプログラミング入門の方で紹介されているHOSは無償なのでこれを最初の開発環境の設定のところを見て以下のメモ書きのようにやってみました.取りあえずビルドできたので,なんとか使えるっぽいです.11月過ぎたら,マイクロマウスをITRONで動かすことを目標に,じっくり勉強してみます.----以下メモ書き----ITRONプログラミング入門の本を見てやってみたことP.6 に書いてあるオーム社のサイトからHEW用のワークスペースをダウンロード.解凍後,hosv4.hwsを起動,するとバージョンが違うので新しいバージョンで開くか?と聞いてきて,OK,OK・・・ をクリック.ワークスペースが開くと,左側にチュートリアルがずらっと並んでいる.チュートリアルの上で右クリックすると”アクティブプロジェクトに設定”とある.どうやらプロジェクトをいくつも並べて切り替えることができるらしい.プロジェクトの読み込みをして一番簡単そうな,h83n_tutorial3_1をロードし,アクティブプロジェクトに設定,開いていたプロジェクトはアンロードした.ビルドするとエラーC:\Program Files\Renesas\Hew\Tools\Renesas\H8\6_0_0\bin\ch38.exeがないだそうで,フォルダを確認すると自分の使っているバージョンは,6_2_1でフォルダ名が違う.検索すると,http://hiepita01.blog47.fc2.com/blog-entry-115.htmlに対処法が書かれていた.メニューのビルドフェーズからPreconfigureを選び変更を選んで,フォルダ名を正しく書き直した.これでビルドができた.ITRONとプログラミング入門図解μITRONによる組込みシステム入門
2009.08.10
コメント(0)
-

でんじろう先生の本
子供がでんじろう先生の本で,木炭電池に興味を示し,自分達で電池を作った.テスターで電圧を測って見せてやったら喜んだ.10円と1円玉で電池を作って直列につないで,LEDをつけて見せたらまた喜んだ.ちょっとは科学に興味を持ってくれるかな.ドラえもん&でんじろう先生のどこでもカガク! じっけんDVDブック 2009年 08月号 [雑誌]
2009.08.06
コメント(0)
-
運がよければから,運が悪ければ・・・へ.
ハーフサイズのステッパーマウスのプログラムを改良しました.これまで「運がよければ完走」といった感じのものが,「運が悪ければ完走できない」位になりました.やったことは,前壁による平行度の補正を強化左右壁との距離補正を強化左右壁切れ(壁出現)による補正を最適化走行時に壁に近づきすぎたときの例外処理前壁に斜めに進入したことを検知して補正旋回時に後ろ壁があるときにお尻をかっつん.これを従来サイズのマウスに移植すればステッパーマウスは一段落.途中経過の参考動画(最終的にはこれよりもう少し良くなりました)夏休みに入ったら,「つくばチャレンジ」の集中しないと.
2009.08.05
コメント(0)
-
サイエンスチャンネル
サイエンスチャンネルでマイクロマウス2008の動画が見れます.自分も一瞬だけ映りました.でもせっかくなら名前が出る位にならないとね・・・http://sc-smn.jst.go.jp/8/bangumi.asp?i_series_code=J087015&i_renban_code=005
2009.08.05
コメント(0)
-

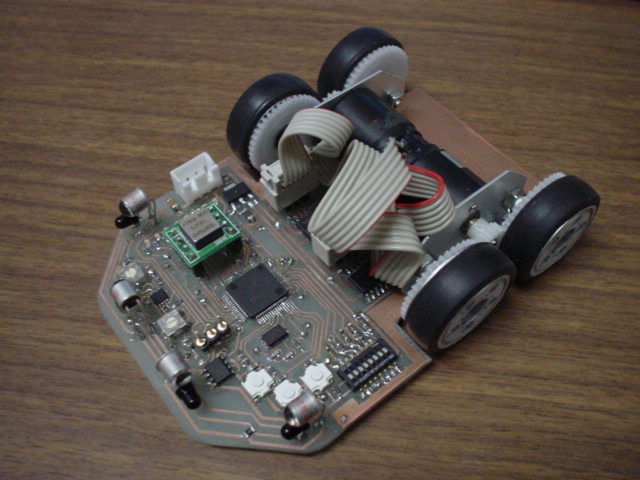
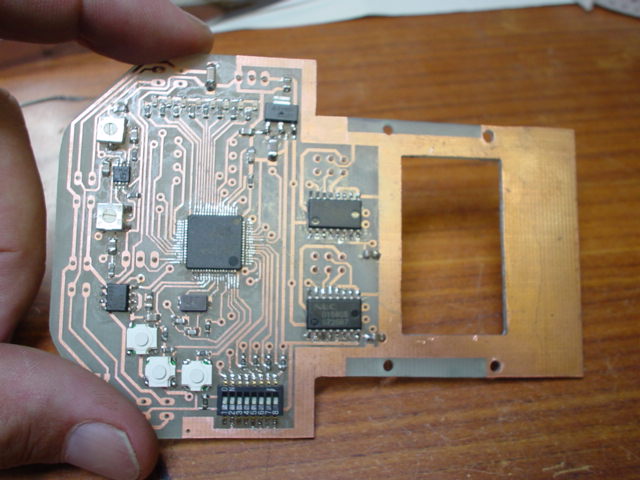
教材用マイクロマウス,いちおう完成
学校の教材用に,秋月のH8-3664を使って片面感光基板1枚でできるマイクロマウスの基板設計と製作を行っていましたが,やっと動作確認できました.もうちょっと小さくしたほうが壁にぶつかりにくいので修正したものをじき公開します.サンハヤト(Sanhayato)片面ポジ感光基板紙フェノール1.6×100×150TEST-K
2009.08.03
コメント(0)
-

Arduinoをはじめました
週末は家族旅行.時間が空いたときに読もうと思って持っていった,Arduinoをはじめようをちょっと読んだので,朝からちょっと動かしてみました.最初のサンプルを読み込んでLEDを点滅させてみたところ↓動画はこちら.Arduinoをはじめよう
2009.08.03
コメント(0)
全26件 (26件中 1-26件目)
1
-
-

- 3DCG作品
- 続・初めての飛行機プラモ 19
- (2025-11-23 06:30:06)
-
-
-

- 家電よもやま
- [楽天市場] 薪ストーブ ・ 石油ス…
- (2025-11-25 18:43:40)
-
-
-

- 【楽天市場】☆☆楽天おかいどくお買い…
- 部屋飲み用に「水筒型の電気ケトル」…
- (2025-11-26 11:38:47)
-



