

2009年09月の記事
全29件 (29件中 1-29件目)
1
-
DCマウスの製作メモ
まだまだだなーと思ったのでメモ.取りあえず動いていたので後回しにしてたけど,前と左右のセンサの感度が違うけどので,デジカメでチェック.赤外線の強度が明らかに違う.回路間違ったか,あるいはFETドライバが焼けたかと思って,回路チェック.簡単な回路なので確認して間違えはなさそう.実体顕微鏡で半田付けチェック.問題なさそう.オシロでチェック.ON時のFETの電圧降下はほぼ0,焼けてなさそう.しかし,OFF時の電圧の波形がおかしい.もしやと思って,2chで前2つと左右の信号を同時に確認.すると,赤外LEDに加わる電圧変動が大きく,前右,前左,右,左の順に電圧下がってる.スイッチングが早すぎてキャパシタが十分に充電されてなかった.この回路はジャイロを取り付ける前に調べて問題なし,と思ってたのだが,ジャイロを後で取り付け,ジャイロの読み取りを追加したために,その時間の間,キャパシタ充電時間が余計に取れて,結果読み出し順にLEDの強度が変わることになっていた.対策は,ジャイロの読み取りタイミングがLEDの等間隔の点灯タイミングをじゃましないようにする.この影響でジャイロの積算値が変わるが,しょうがない.ほか,適当に決めたスイッチング時間をちゃんと考えて長めにとる.さらにセンサの不具合について,回路を簡単にするために前右と右,前左と左はそれぞれ並列回路だが,前右を照らすLEDの光が右向きのセンサに入るのが無視できないレベル.(手で隠した程度じゃだめなレベル.)遮蔽をするしかない.遮蔽材料も,ちゃんと選ばないとだめ.可視光と赤外じゃ違う,紙じゃ赤外線通す.アルミなど金属は薄くても遮蔽効果大.モータ回路について,回路を簡単にして,ドライバICのチャージポンピングは使ってなかった.加減速の加速度に限界ありそう.ブレーキのON抵抗高いのか,逆転ブレーキも効きが悪く制御に余計な手間がかかりそう.取りあえずできるのはICのスタック? でもまだソフト的にできそうなことがあるし,スタックは最終手段とする.
2009.09.30
コメント(0)
-
DCマウスが着実に進歩してます
ハードは私が作りましたが,ソフトはPi:Coを自在に操ったもう一人の超優秀な学生に任せてます.定速のサーキット走行までできました.九州地区大会には間に合わせてくれるでしょう.定速(低速)サーキット走行--追記--もう少し速くなったらいいね,といったらもう速くなりました.スラロームは同じ速度で,直線だけ加減速を加えたそうです.中速サーキット走行更に速くすることも可能なようですが,手間がかかるそうです.
2009.09.28
コメント(0)
-

マイクロマウス公式タイマー
超優秀な学生が無事完成させてくれました.お疲れ様.
2009.09.28
コメント(2)
-
SI2009
草稿の草稿くらいができた.頭を冷やして考え直してから再度見直す.こんな感じの図を書いたりしてました↓--追記--手を離れないと次が進まないので,適当に仕上げて提出しました.もう一つ書いた図はこんな感じ↓
2009.09.25
コメント(1)
-

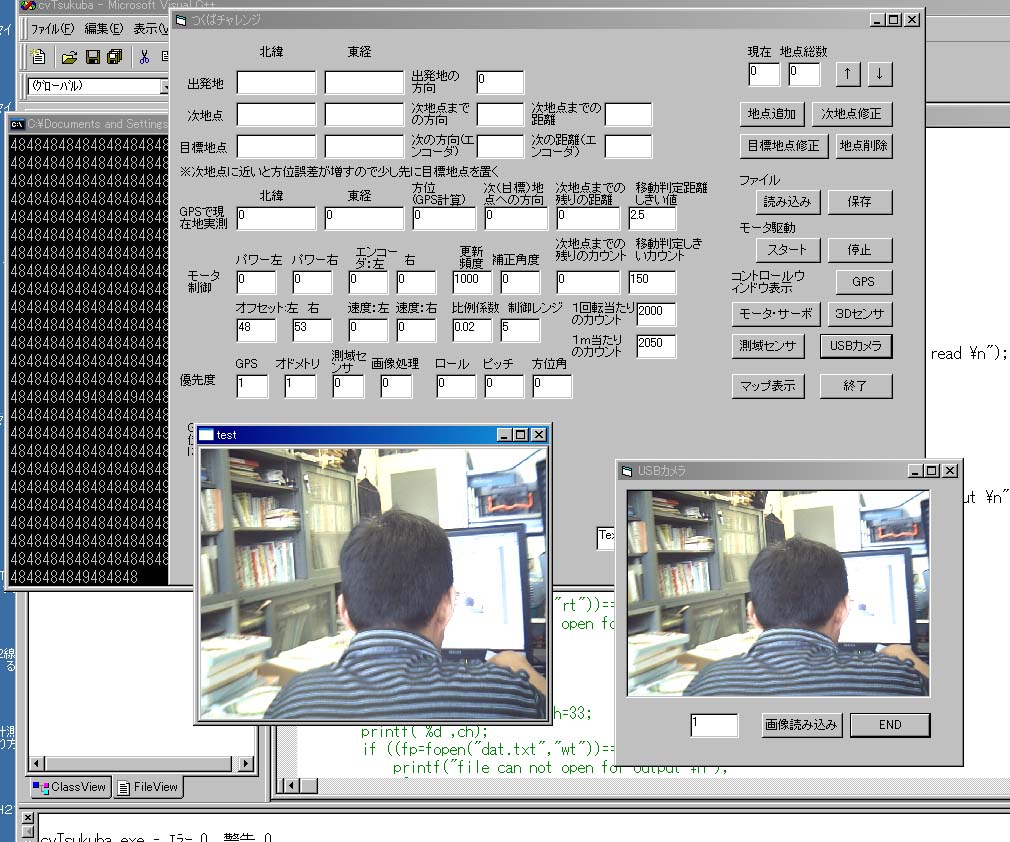
最低限の画像処理はできたもよう.
テンプレートマッチングと透視変換で参照画像とのズレを計算.VBとの受け渡し.--追記--昼寝したので眠くならず少し進めた.写真と撮影場所と方向とを関連付けて読み出せるようにした.Microsoft Visual Studio 2008 Professional Edition アカデミック
2009.09.23
コメント(0)
-
ターン速度と加速度と低イナーシャ?
この話題ですが,そんなレベルに達してないのでピンと来ないです.低イナーシャ”ってなんだっけ?イナーシャ”ってなんだろうと思って前に調べたのですが,普段使わない言葉なので忘れてまってました.そりゃ低いほうが良いと思います.軽量で低重心で低イナーシャで接地面積とタイヤの摩擦を大きくロスを省くほうが良さそうなのは想像つきます.何をトレードオフするかなんでしょうけど.制御良いプログラムを組んで走りこんでパラメータを調整するより,4輪で吸引してべたっと強引に走るほうが新参者には簡単かな?と思ったのですがいかがでしょうか.
2009.09.22
コメント(0)
-
発表するにしても・・・
ロボットは学術的にはド素人だし,適当に考えながら作ったつくばチャレンジのロボットをSI2009 でどう発表原稿書くか悩んでます.こんな感じで作りました,なら書けるけど,学会発表となれば何が学術的に新しいのか古いのかぐらい知ってないと書けないなぁ・・・と思ってこんな時間までWebで論文検索.googleで”テンプレートマッチング 透視変換”と入力するとこのブログの最近のエントリーが一番に出てくるんですけど,これってどう解釈すればいいんでしょうか?困った.
2009.09.18
コメント(0)
-
第19回マイクロマウス九州地区大会,修正しました.
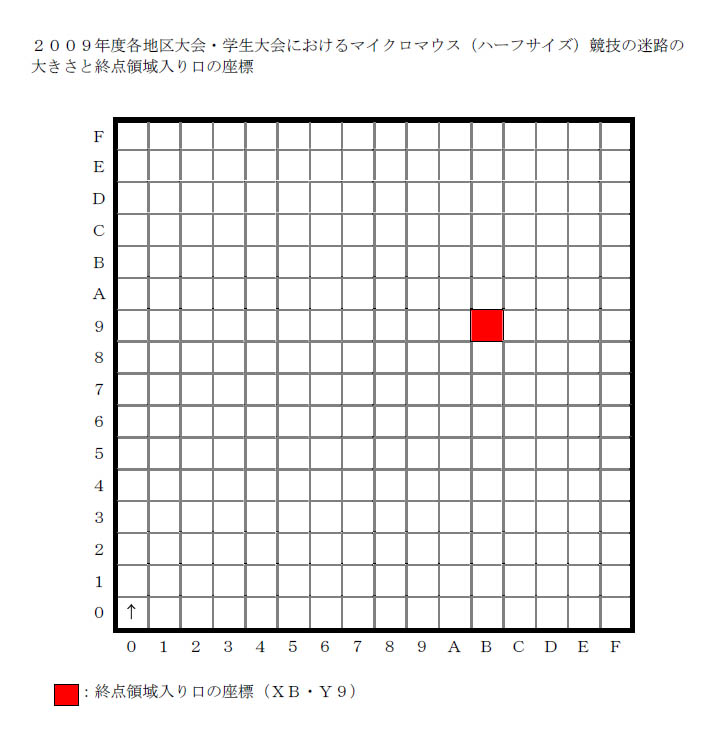
第19回マイクロマウス九州地区大会について,フリーページを修正しました.詳細はこちら(http://plaza.rakuten.co.jp/CPU4Edu/22000)マイクロマウス(ハーフサイズ)競技のゴール位置が発表になりました.またシード権について修正しました.
2009.09.18
コメント(0)
-
画像処理がうまくいかない.
Webカメラより画像取り込んで参照画像に設定.その後,左右に動いてカメラ画像を読みこんで,どちらにずれているか判定.条件がいいときは上手く動いているように見えるけど...違う場所でやったら値が逆転したりして意味不明.原理的に無理なのかな?--追記--実験を重ねてみたら,原理的には無理じゃないようだ.ただし条件が厳しい.条件に合わせるようにカメラ(ロボット)を動かさないといけない.ソフト的な工夫も必要.バグも分かった.透視の座標をちゃんと考えること.メモリの確保と解放が上手く対応してない.とりあえず1歩前進.--更に追記--あれこれ考えたら,条件が厳しい理由が分かった.ソフトのイメージも分かったが,だんだん速度的に厳しくなってくる.しかも,あれこれ仕事が来てソフト作れない.間に合うのかな・・・?
2009.09.16
コメント(0)
-

OpenCVで画面の切り抜き
これもほとんどサンプル通り.http://opencv.jp/sample/sampling_and_geometricaltransforms.htmlセンター位置を変えて, center.x = src_img->width *3/4; center.y = src_img->height *3/4;画像の大きさを縦横半分に dst_img->width /=2; dst_img->height /=2;結果↓
2009.09.16
コメント(0)
-

透視変換とテンプレートマッチング
微妙な結果.とりあえず経過記録.透視変換とテンプレートマッチングを使ってコースの修正をしようとしたんだけど,もう少しがんばらないと上手くいくかどうかわからない.実践画像処理入門
2009.09.15
コメント(0)
-

テンプレートマッチング,続き (追記あり)
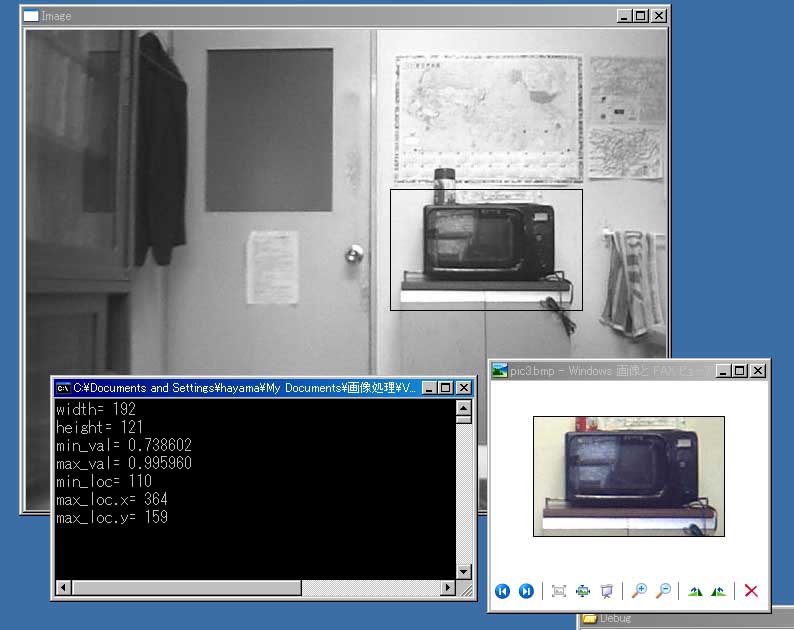
昨日の続き.約15度傾いた画像でも認識してくれる.普通の道で15度傾いた場所なんてないから傾き補正はしなくてOK?テキスト画面のmax_valの値が傾きに応じて下がってくる.さらに続き.今度は画像の縮小もしてみた.比較対象画像を15度傾け,80%縮小しても認識可能.max_valの値は0.908に下がった.さらにさらに続き.10度ひし形に歪ませて認識.max_valの値は0.93くらい.かなりの違いでも妥当な認識ができ,傾きや縮尺でmax_valの値が連続的に変化してくれるなかなかの優れもの.あれこれ認識方法を考えていたが,テンプレートマッチングだけで考えたことができそう.詳解OpenCV
2009.09.15
コメント(0)
-
テンプレートマッチングをやってみた
つくばチャレンジのロボットの画像処理に使うテンプレートマッチングを試した.画像処理としては初歩の初歩なんだろうけど.予定ルートで写真を撮りためておいて,現在のルートから見える画像と照合して現在位置やルートのずれを検出できないかと考え中.参考URLhttp://opencv.jp/sample/matching.htmlただし,プログラム中にバグあるみたい.(cvRectangleの引数の数が合わない)画像をグレースケールで読み込んで,テンプレート画像の位置を表示したところ↓OpenCVプログラミングブック第2版
2009.09.14
コメント(0)
-
つくばチャレンジ,週末の成果
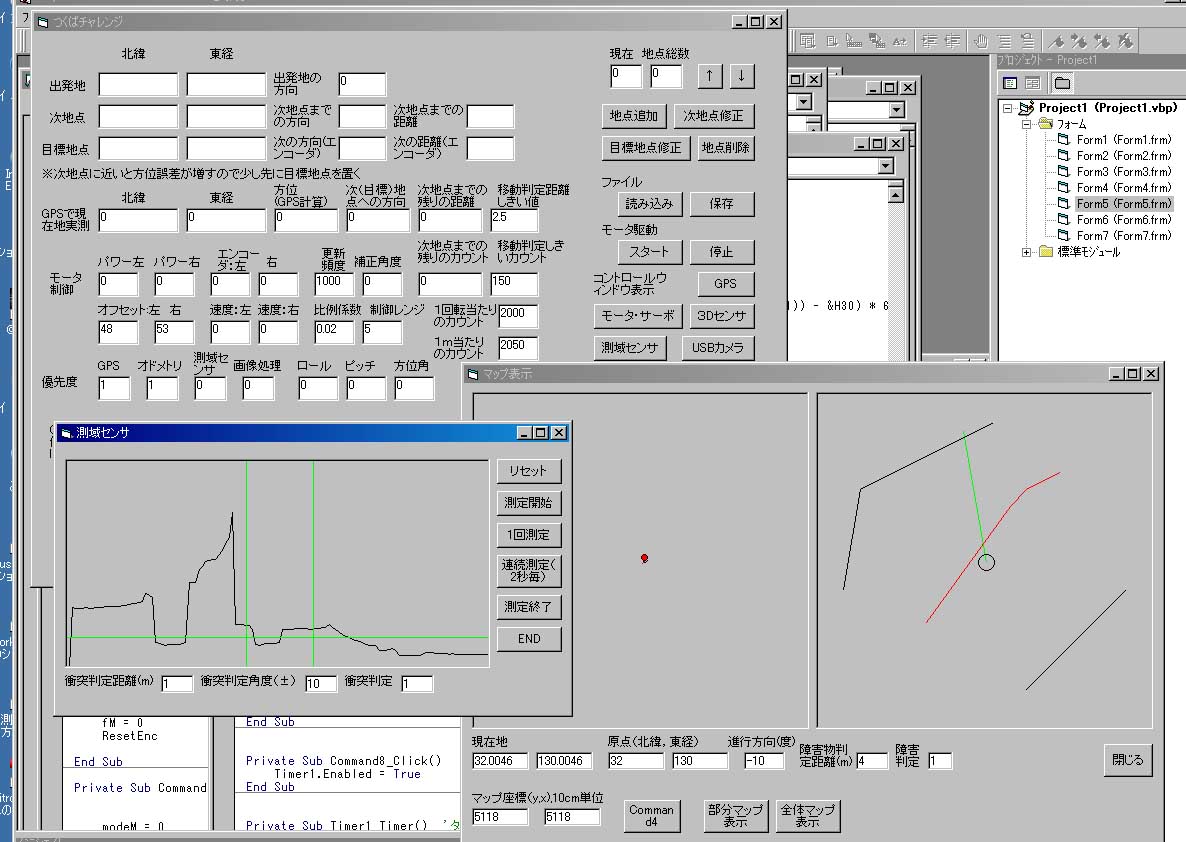
週末,子守の合間にプログラム作成.作った分を動かしてみたらすんなり動いてよかった.左下ウィンドウは,測域センサで衝突判定距離と角度を指定すると,その範囲内の障害物があれば判定フラグが立つプログラムを作ったところ.右下ウィンドウはマップ上の指定したコースを外れる状況だと障害物判定フラグが立つプログラムを作成.黒線がコース境界,予定進路は赤,ロボットは丸,進路を緑で表示,角度と距離を入れると判定フラグが変化する.次は画像処理をどうするか・・・?
2009.09.14
コメント(1)
-
4輪DCマウス進捗状況
Mくんプログラム作成中.右90ターンの繰り返し
2009.09.14
コメント(1)
-

今日もマップのところ.
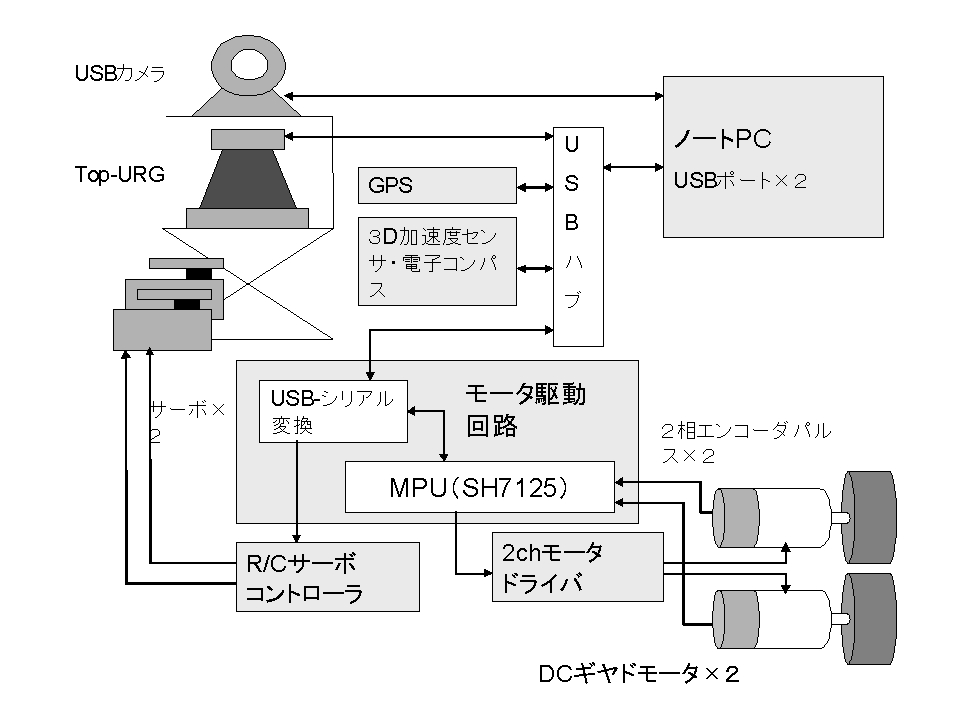
少しずつマップのプログラムかいてます.夜に辛い残業予定なので,ぼちぼちと.--追記--現状記録10cm単位として1km四方をメッシュに切って座標管理.1km四方を表示するマップと10m四方を表示する自分を中心とした拡大マップを並べて作成.あらかじめ取った障害物をラインを表示.予定ルートを赤線で表示.現在のGPS座標が更新されると,全体マップ上の赤い点が動き,拡大マップも更新される.あと,現在位置からの進行方向に障害物があるかどうかの判定を組み込む.TOP-URGから得た障害物もマップ上に重ねて表示し,判定要素に加える予定.--さらに追記--夜の辛い残業が来ないので,やっぱり軽い残業でプログラム作成.久しぶりに行列式とか計算しました.GPSのための実用プログラミング
2009.09.11
コメント(0)
-

電波受験界 H21年10月号
なぜか表紙の写真に.ムシ0910へのリンク電波受験界 2009年 10月号 [雑誌]
2009.09.10
コメント(0)
-

今日は・・・
朝からマイクロマウスの計測基板の組み立てちょっと,旋盤でホイールとギヤ削り.これからつくばチャレンジのソフト作成,マップ関係.Lipoが膨れてきたのでLiPo数種類とベアリングとジャイロ注文.--追記--と思ったらヘルプ電話が来てクリーンルームへ.昔取った杵柄で,真空チャンバーのリークを探して,午前中終わり.ま,役に立ったからいいか.おすすめ本↓半導体デバイス工学MOS集積回路の設計・製造と信頼性技術
2009.09.10
コメント(0)
-
つくばチャレンジ,OpenCVとVB6
前にも書きましたが,つくばチャレンジのロボットのプログラムはVB6で書いてます.画像処理はOpenCVでやろうとしてるのですが,OpenCVとVB6の間でデータやコマンドのやり取りするのに困りました.どちらも使いこなしてるわけではないので.手っ取り早いのはファイルを介してやり取りかな,と思って,OpenCVで画像を出力してVB6で画像を読み出したのですが,タイミングが悪いとファイルを同時にアクセスしてエラーに.OpenCVに用意されてる画像保存ではファイルアクセスできないときエラー終了してしまうので,標準入出力に用意されてるテキストファイルの書込んだ値でタイミングを取って画像の同時アクセスをしないようにしました.結果,OpenCVからVBに画像を渡すことができて,スマートな方法ではないけど一歩前進.OpenCVプログラミングブック第2版実践OpenCV--追記--またちょっとつまずいて検索かけたらあれこれ出てきますがやっぱりVB6じゃ古いみたい.来年はVC#いちから勉強しないといけないかなぁ.
2009.09.09
コメント(0)
-
マイクロマウス2009
参加登録しました.参加費もe-bankから振り込み完了.
2009.09.08
コメント(0)
-

ドリル小物をいろいろ買いました
テーブルドリルの小物をいろいろ買いました.HOZANのドリルはPROXXONのOEMらしい?ので,PROXXONのカタログから,マイクロ・クロステーブル,ミニバイスなど.ダメだとは聞いていたんですが試しにフライス加工してみたら,やっぱりダメでした.ドリルの軸がぶれます,横方向には弱いです.なので,来年お金があったら,マイクロフライステーブル(クロステーブルなし)かな.プロクソン マイクロフライステーブル No.27110マイクロフライステーブルオプションPROXXON(プロクソン) エンドミル3種セット No.27116プロクソン PROXXONミニ分割テーブル No.24264
2009.09.08
コメント(0)
-
ムシ0910
昨日入った情報.ムシ0910が要チェック!分かる人はわかる電略の来月号.
2009.09.08
コメント(0)
-
ソフト作成中
3Dセンサモジュールの値を使ってサーボでUSBカメラとレーザレンジファインダを水平に保つプログラムを作成してみたけど,サーボがガギガギと動く振動でモジュールが揺れて,安定しない.センサモジュールの設置場所を変えて,クッションで余計な振動を除けばぎりぎり使えそうだけど,信頼性が微妙な感じ.もう時間がないのでハード的な改造は置いといて次のプログラムにうつる.3Dセンサについてはこちら↓http://plaza.rakuten.co.jp/CPU4Edu/16016機体を傾けると,2秒遅れくらいでおよそ水平になります動画
2009.09.07
コメント(0)
-
SI2009の原稿・・・
つくばチャレンジの参加者には,第10回計測自動制御学会SI部門講演会SI2009への投稿をお願いしております,ということで講演会原稿を9/30までに書かないといけないのですが,これもまた困ってます.だってまだまともに動いてないのに原稿なんかかけません.というわけで急ピッチでプログラム作成中.
2009.09.07
コメント(0)
-
苦痛な作業中・・・
愚痴です・・・頼まれて英語論文出した.マイクロマウスをテーマにした教育論文.やったことをやったようにしか書けませんよ,それでいいからというので.ところが査読がいろいろ追加を言ってくるから大変.書いた以上ネタ無いのでずらして盛り付けるしかない.個人的には取り下げたいところだけど,しらがらみでそうもいかないらしい.なので休みなしで苦痛な作業中.
2009.09.05
コメント(0)
-
IJEロボコン2008のソースとソフトの考え方
”つくばチャレンジ”のソフトを考えながら,昨年のインドネシアで開催されたロボット大会のソフトを見直していたら,ソフトの考え方のまとめを書いててなかったので,1年遅れですが書いておきます.マウスのプログラムを追加修正しただけでできてます.ソースプログラムはこちら↓TheDenpaFinal.c[ソフトウェアの考え方について]・区画ごとに走行することに関しては基本的にマイクロマウスと同じルーチンを使用.・マップは固定されているので最初から与えておく.・火を消したりベイビーを救出しにいくには,ロウソクやベイビーにフラグを設定し,フラグを見ながら優先順位をつけてそれぞれ場所にいかせる.・場所への移動は,マウスの最短経路探索ルーチンを使って,スタート,ゴールを設定して経路探索する.・経路途中に障害物(相手ロボット)がいたらそこを仮想壁とみなし,経路を再探索.(袋小路で相手に邪魔されたら動けなくなるがしょうがない)・指定場所に着いてフラグが経っていなかったら指定動作をさせる.例えばロウソクなら後ろを向いて45度回してロウソクの向きにファンを向けて,ファン回転,など.・完全勝利パターンのフラグが全部立っていたら,スタート位置に戻ってベイビーを離す.・その後は,残っているロウソクを消して回る.
2009.09.03
コメント(0)
-
第30回全日本マイクロマウス大会参加登録開始!
ニューテクノロジー振興財団のホームページより,第30回全日本マイクロマウス大会参加登録開始!です↓http://www.robomedia.org/micromouse2009/sanka.html第19回マイクロマウス九州地区大会もお忘れなく↓http://www.robomedia.org/directory/jp/ntf-HP/mouse/tiku/09-07.html今年は,従来サイズとハーフサイズの2台をエントリーするつもりです.従来サイズは,自作片面基板の4輪(吸引予定)で,ハーフサイズは昨年のH8-3664のステッパーマウスはメモリ不足でマップが作れないので,最近動き出したユニバーサル基板のDCハーフマウスでいきます.
2009.09.01
コメント(0)
-

DCハーフサイズマウスonユニバーサル基板,やっと迷路を走り始めました・・・しかし,
DCハーフサイズマウスonユニバーサル基板,やっと迷路を走り始めました.しかし,まだまだお馬鹿さんです.すぐに道に迷ってしまいます.迷路で迷ってる動画たぶん,センサの初期値と,壁有無判断のしきい値と,壁切れの補正の値を調整すれば,もう少しまともに走るようになります.
2009.09.01
コメント(0)
-
デバグ中
H8とGDLで動いてたプログラムが,SH7125とHEWで動かない.無反応になるのが一番困る.デバグの頼りは8個のLEDだけ.プログラムのどこが悪いのか,LEDを順番につけてみたりしてる.
2009.09.01
コメント(0)
全29件 (29件中 1-29件目)
1
-
-

- デジタル一眼レフカメラ
- 大人のリカ活&ミニカメラ サウンド…
- (2025-11-14 10:36:31)
-
-
-

- 3DCG作品
- 続・初めての飛行機プラモ 19
- (2025-11-23 06:30:06)
-
-
-

- ブログ更新しました♪
- 11月25日 記事更新致しました。
- (2025-11-25 17:23:31)
-



