

2017年05月の記事
全4件 (4件中 1-4件目)
1
-

MultiWiiでクワッドコプターが飛びました
MultiWiiの機体側のファームウェアの構成にちょっと目を通して,MultiWiiConfigにもちょっと目を通した後,機体にMultiWiiを搭載して配線してMultiWiiConfigを使って設定.スロットルとエレベータはリバース.サーボ中央値は1500に合わせて,スロットルの最低値が高いとアームしなかったのでアームできるところまで下限を下げて,AUX1を接続してモードを変えられるようにしてとりあえずAngleとHorizonを切り替えられるようにして,送信機の操作と各モータのパワーの変化が正しいことを確認して,バッテリーを接続してモーターを回してみました.手て抑えたままゆっくりモーターを回し,スティック操作の方向を確かめ,揺らした時の押さえを見ました.問題なさそうなので,体育館に持って行って初飛行.スロットルを上げたとたんに急に浮き上がりました.水平の安定は問題なく割とレスポンスよく操作できるのですが,スロットルに対する上下が激しすぎ.一定高度で浮かすことができません.3S-11.1v-2200mAhで飛ばしてみたのですが,試しに,2S-7.4Vのバッテリーで飛ばしてみると,割と緩やかで高さも安定します.ちょっとパワーありすぎ状態のようです.APMでは3Sバッテリーですんなり飛んでるので,緩やかになるようにパラメータを調整してみます.機体の重量はバッテリー込で800g位,モータの推力は1個で最大600g位ですので,余裕はある状態.飛行時間は計算上で10分くらいになります.
2017.05.30
コメント(0)
-
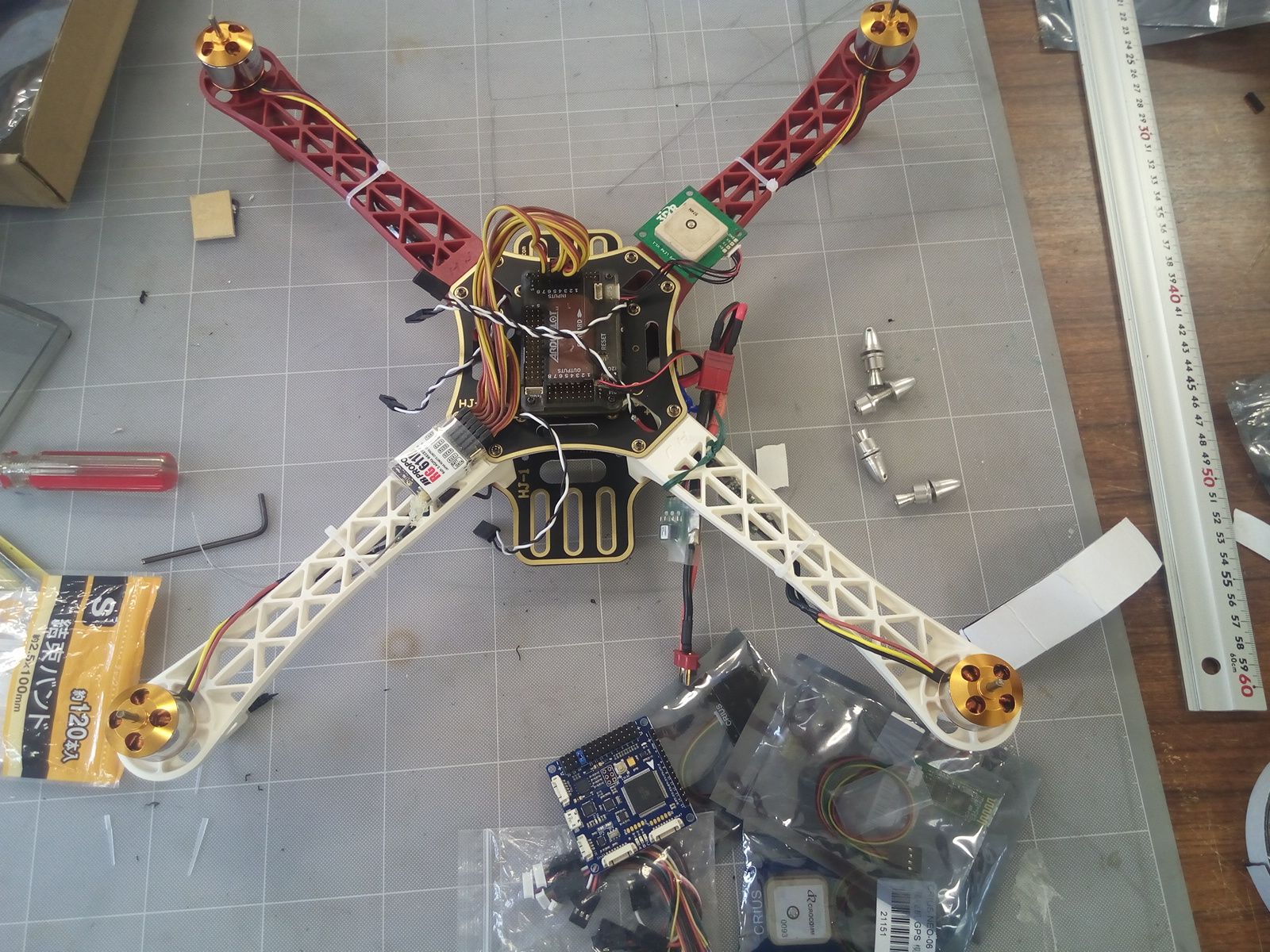
MultiWiiを設定中
また違うドローンを作るために,MultiWiiを買ってみた.取りあえず飛ばしてみるためのフレーム,モーターをサイトの安売り品で見つけて調達.ちゃんと飛ぶか,プロペラ,バッテリーはどのサイズが良いか事前検証のために,使ったことのあるAPMでちゃちゃっと設定.すんなり飛んだ.MultiWiiの使い方は,おとなラジコンさんのサイトをみてファイルをダウンロード.http://otonaradicon.com/all-in-one-pro-flight-controller-setting/ArduinoからMultiWiiのファイル一式を開いてコンパイル,ボードへのファームの書き込みもすんなりできた.つづいて,コンフィグツール(MultiWiiConf)も起動してボードと接続して,データもちゃんと表示されてる.アプリがターゲットOSに対して何通りかあって,pdeファイルも入ってたので,これってProcessing?と思ってProcessingで開いたらそうらしい.PCに入ってた古いバージョンのprocessingで開いたらエラーがでたので,同じくPCに入ってた割と新しいバージョン(最新バージョンではない)で開いて動かしてみたら,アプリと同じような画面(ちょっと違うけど)が出た.ざっと見て3000行くらい.頑張れば読めるか.
2017.05.25
コメント(0)
-

最近,更新がとまってますが...
更新がとまってますが,なんにも作ってないわけではなく,いろいろ雑多な仕事の合間にまた新作を作っております.ここ数年は論文書く代わりに?毎年特許出願してるので,今作ってるものも特許出願したいと思っています.なので,なんだかわからないように今日できたパーツだけ↓
2017.05.23
コメント(0)
-
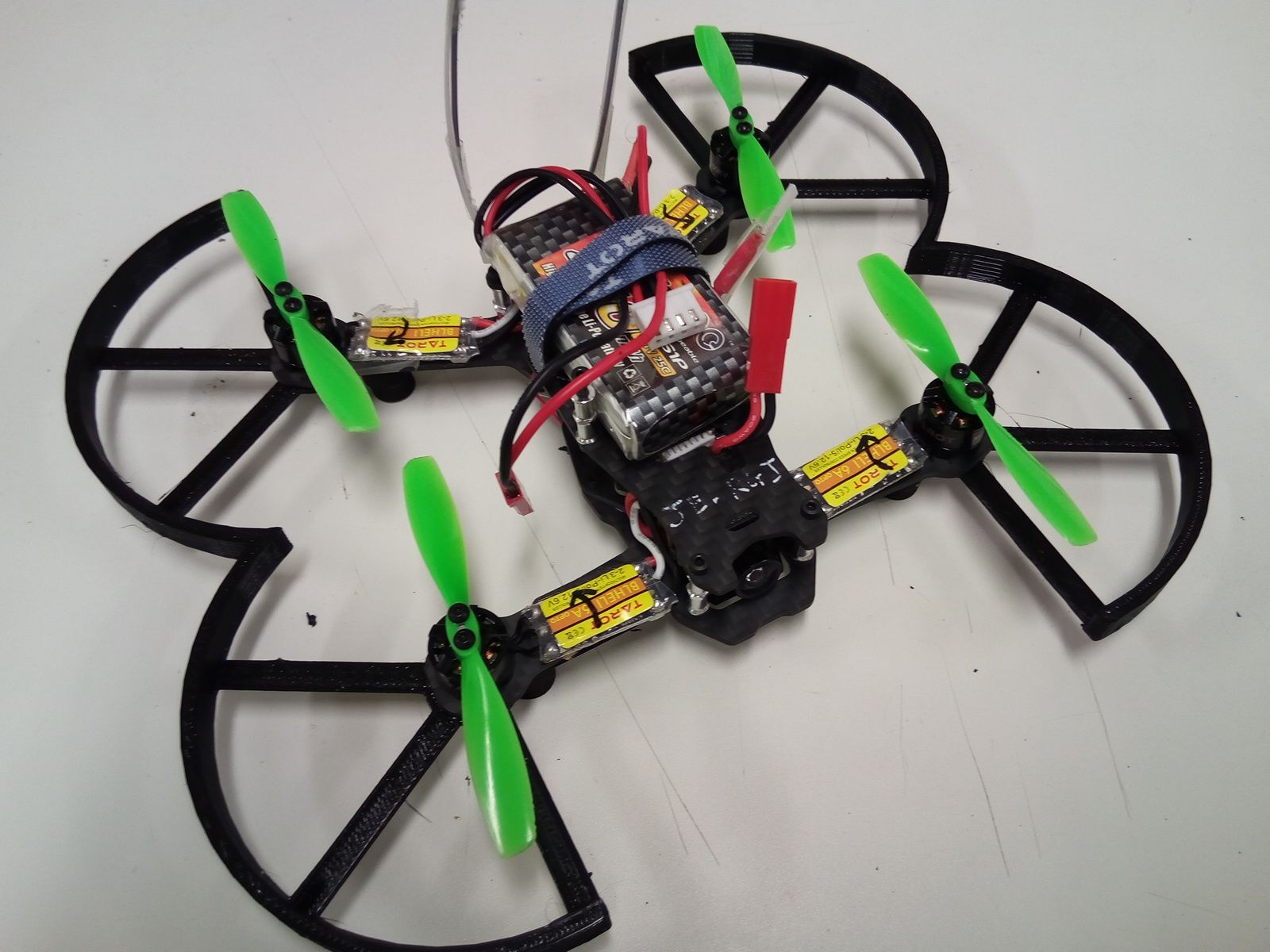
Tarot TL130H1のプロペラガードを作った.
Tarot の TL130H1 という200g未満のFPVレーサーのプロペラガードを作りました.ダヴィンチJr1.0で出力できるギリギリサイズ,斜めにおいて出力しました.裏面に両面テープで貼りつけます.2か所で剛性はまあまあ,そんなにスピードを出さなければ,プロペラをぶつけて割ることもなくなりそうです.最初に考えたのはこちら↓ 作ってみてぶつけてプロペラが当たってすぐ壊れました.前後のプロペラの間隔がないので,きちきちに作ったら弱すぎました.一つはこんな感じ.これを4つ出力してそれぞれ適当にカットして貼り付け.どっちのパターンも何かの役に立つかもしれないので,Thingiverseにアップロードして公開しました.興味のある方はどうぞ.http://www.thingiverse.com/thing:2308728http://www.thingiverse.com/thing:2308680
2017.05.10
コメント(0)
全4件 (4件中 1-4件目)
1
-
-

- 私のPC生活
- PC画面保護フィルム
- (2025-11-23 12:55:08)
-
-
-

- ジャンクパーツ
- 秋原他でのお買い物250111ハーフその…
- (2025-02-15 18:03:22)
-
-
-

- iPad
- イチオシ BETTDOW Magic Keyboard 2…
- (2025-10-02 04:19:46)
-



