

2012年07月の記事
全9件 (9件中 1-9件目)
1
-

ブレッドボードでArduinoの実習
ブレッドボード上でArduinoのIDEを使った実習を行うため、10セット+教示用を作った。USB-シリアル変換(共用)を挿してかきこみ。最近、Arduinoのボードも安いですが、ちょっとした工作をしてそのまま使うには単価が安くなります。
2012.07.31
コメント(0)
-

中学校の理科教材用に酸素センサ
学校で中学校の理科教材支援に酸素センサとその回路を作成、のお手伝い。センサはこれ↓ 車の排ガスのセンス用回路は、簡単にOPAMPを1つで出力を増幅しただけ↓アンプの感度調整で酸素濃度の値約20%ー>約2Vにして、息を吹きかけたりしてみると、酸素濃度が低下しているのが見られます。絶対値を取るのは難しいので、変化の検出用途として使います。注意点は、センサが高温になること。内部は500度以上なので触るとやけどします。
2012.07.31
コメント(0)
-

LEDホタル
Make Tokyo Meeting で、電池に自己点滅LEDを挟んだだけの物を頂いたのですが、あるイベントで簡単な半田付けを伴った工作を企画して欲しいと言われて、ハンダ付けを入れて作ったものです。材料はこれだけ↓裏面で電池とLEDをはんだづけしただけです。電池ケースに電池を抜き差しできるので、不要な時は電池を外しておけます。
2012.07.30
コメント(0)
-

授業見学会
今日の午前中は、学校で授業見学会があったので、手軽に持ち運び出来るものを玄関ホールに展示してきました。ピンポン玉に字を描く球形プリンタは結構人気がありました。
2012.07.26
コメント(0)
-
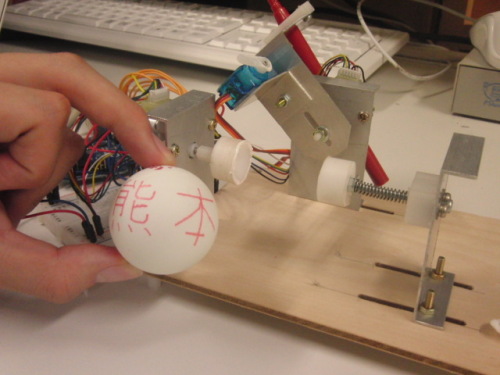
ピン球bot、文字がかけました。
ピンポン玉など球体用プリンターの自作。ソフト担当のY君くんがちゃんと動かしてくれました。その動画→ ピンポン球ロボット、文字かけましたオープンキャンパスなどでデモに使いたいと思います。
2012.07.19
コメント(0)
-

2重反転プロペラによる球形飛行体、マイコン搭載しました。
ちょっと間があきましたが、2重反転プロペラによる飛行体にマイコンを搭載しました。 単なるラジコンではなく、ちょっと気の利いたコントロールができはじめました。-追記-自分メモ。この機体の場合、2重反転ペラは結構大きく回転変えないと方向を変えられない。係数大きめに修正。比例係数を大きくしたら、反転ペラの特性が多少違っても許容範囲に収まったので、ヨー軸はPDだけにしておく。ピタっと止まる必要はない。高度調整にIが大きく効いてくるはずなので、分離しておいた方が良さそう。ヨー軸を強制的に動かすと、そのままだと反対向き(±180度)で不連続な力がかかるのでどうしようかなぁ?-追記2-自分メモ。初期設定が狂ったり、バッテリーの残量で、PDだけではバランスがとれなくなり暴れだした。やっぱりI制御も入れる。プログラムは書いたけど動作確認まだ。ラダーエレベータを移動方位に割り当てたため、エルロンでヨー軸制御をできるようにした。エルロンが中立だと自動的に固定方向に向くようになってるけど、エルロン中立でその向き維持の制御パターンもあるかな。-追記3-追加したI制御の確認。係数は適当だけどいちおう制御できてそうな動画
2012.07.13
コメント(0)
-

AR.Drone2.0(エイアール・ドローン2.0)
ブックマーク。欲しいけど意地で買わないのだ。【お取寄せ】【送料無料】パロット AR.Drone 2.0 PF721212
2012.07.09
コメント(0)
-
飛行体の製作について分類してまとめました。
一度にあれこれ作り始めてまだ途中のものばかりですが、分類してまとめのページを作りましました。トライコプター(Tricopter)の製作はこちらから。クアッドコプター(Quadcopter)の製作はこちらから。自転式飛行体の製作はこちらから。自律飛行機(デルタ翼)はこちらから。自転式飛行体の応用はこちらから。2重反転による球形飛行体はこちらから。まだまだ続きます。
2012.07.06
コメント(0)
-
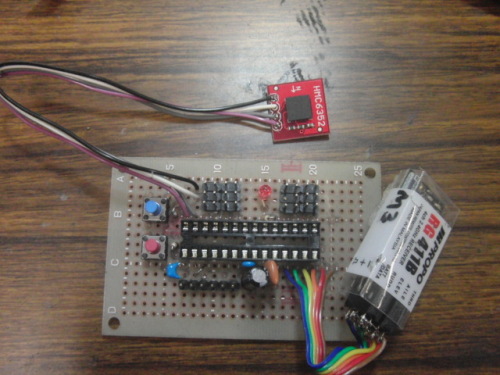
マイコンは目を回さない第三弾
ハンダ付けできた。Arduino-IDEを用いた飛行体の基板で、プログラム書き込みのシリアル通信のピンヘッダ。飛行時にはGPSを接続。R/C受信機読み取りと反対側にサーボ出力。I2C通信でセンサ読み取り、残りのアナログ入力4ポートを拡張用。スイッチとLEDをを1つずつ。このパターンがだいたい固定化してきたので、基板を焼くかCNCで削るかな。
2012.07.05
コメント(0)
全9件 (9件中 1-9件目)
1
-
-

- iPad
- イチオシ BETTDOW Magic Keyboard 2…
- (2025-10-02 04:19:46)
-
-
-

- 新生活にむけてほしい家電は?
- 176
- (2025-11-14 13:24:44)
-
-
-

- 大好き!デジカメ!
- 10年以上昔のコンデジに復活の日を
- (2025-11-12 07:20:04)
-



