

2012年06月の記事
全21件 (21件中 1-21件目)
1
-

デザインナイフで、くまモン鉛筆を削った。
熊本県民なら誰でも知ってる”くまモン”。初めて削ったので用心して頭でっかちのまま作ったけど、次に作る時もう少しバランスよく作りたい。本職の方のページ↓鉛筆彫刻 http://enpitsu.bakufu.org/
2012.06.29
コメント(0)
-

2重反転プロペラが大破・・・
普通に回してただけですが、異音がしだしたので調べたら、固定部分が1箇所ポッキリ折れてました。断面を見ると接続部分はほんの少し。設計に問題ありな感じもありますが、軽さとパワーを追求した商品だからギリギリのところなんでしょう。取り付けやネジの緩みなどで一部に力がかかったり振動のストレスをかけてしまったのかもしれません。 交換も修理も無理だと思いますので、接着してみました。これじゃ回らないんじゃないの? って思われますが。ベタっと着いてたのは、実はエポキシの硬化の保持用にホットボンドで止めていたもの。いったん形が決まったら、ホットボンドをはがして、接続部分にモリモリにエポキシを再充填。これでなんとか固定できるでしょうか…?-追記-1日たったので、組み上げて回してみました。強度的に不安はありますが、固定はできたようです。しかし、先の方のプロペラの振動が大きく軸ブレもひどいです。多分これも異音の要因だったようです。回しているうちにどこか緩んだのか、軸ブレも根本が折れた原因かもしれません。分解修理しようとしましたが、軸が打ち込んであるようでキツく、抜けません。無理すると余計悪くしそうなので、簡易的な対処を考えて、セロハンテープでプロペラのバランスを取ってみました。すると、振動が収まったので、今後はできるだけ低回転で使うことにします。
2012.06.28
コメント(0)
-
直交円形飛行体、ビュンビュンとはいかないものの連続で飛ばしてみた
その動画二重反転ペラによる飛行体。現在は、スロットル、エルロンー>モーターアンプラダー、エレベーター>尾翼で操縦しています。スロットル、エルロンは送信機によるミキシングをかけてそれぞれのモータに力を配分していますが、ジャイロの信号はエルロンにしか入れていません。なので、ロールの安定化がかかろうとすると片側のモータのみ回転が変わるので上昇または下降も同時に入ってしまいます。Vテールミキサーがあれば(今持ってない)1つのジャイロを両モータに分配できるので、ロールをもっと安定化させることができ、そうしたらびゅんびゅん飛ばせるようになると思います。普通は垂直に安定で、尾翼を切ると斜めになって横に飛ばせます。今の状態は重心が低すぎるので、斜め飛行からの回復を急に行うとお尻が振れます。飛行時間を測るために連続でふらふら飛ばしてました。この前に1分弱飛ばしてるので、800mAh3セルリポで計9分弱は飛ばせそうです。基本的には安定してるので、マイコンと9軸IMUを積めば上手く自律化出来るんじゃないかと思います。
2012.06.28
コメント(0)
-
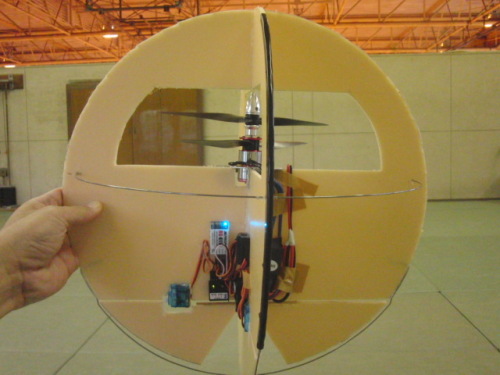
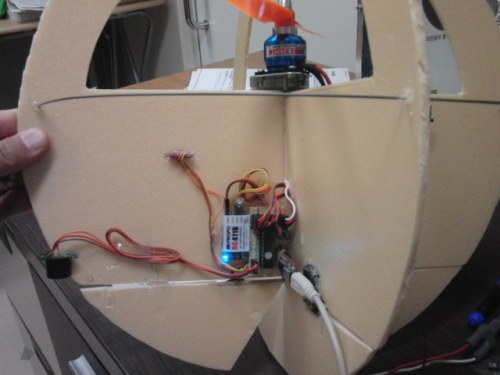
別に、自転してもしなくてもいい、球形っぽい直交円板の飛行体、その2。機体完成
機体完成。R/Cで飛ばせます。とりあえず浮かせただけのテスト動画。設定間違ってたところがあったので、操縦はできてませんが、ふわっと浮いて、操作に対するレスポンスは、普通にあります。3セル800mAhのリポを積んだ状態で320g、バッテリーなしだと250g。11.1V、5.6A(7C,62W)でホバリングしてましたので、飛行時間は理論値で8.6分ほど飛べる計算になります。7.4V,7.2A(52.3W)でも浮いたので、この機体では2セルの方が効率が良さそうです。制作費はプロポを入れても5万円弱くらい。念の為に言っておきますと、自転もできることから対称性を最重要視し、プロペラのガードと尾翼の保護から行き着いた形状ですので悪しからず。
2012.06.27
コメント(0)
-
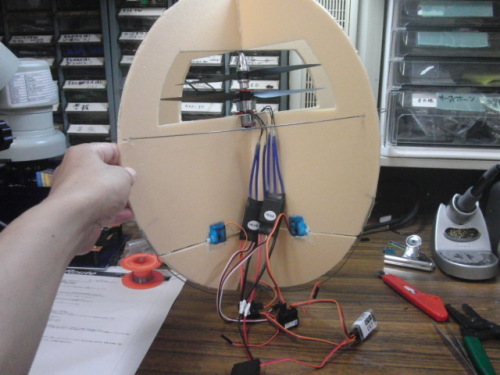
別に、自転してもしなくてもいい、球形っぽい直交円板の飛行体、その1
雨風が強くて、外で実験できないので、次はタイトル通りの物を作成中↓メカ固定すればすぐ、早ければ明日にでも飛ばせると思います。この形で安定して浮くかどうかは重心位置と機体のバランスしだい、ジャイロも3個積んで安定化させますので、多分大丈夫でしょう。
2012.06.26
コメント(0)
-

自作トライコプター(Tricopter)改良
自作のトライコプターを改良してみました。棒を切ってサイズを半分に。GWSの3枚ペラでサイズが一つ大きいものを調達。低回転で浮きがよくなり、振動が減って、ジャイロのレスポンスも良くなり、電池のセル数も減らして軽くなりました。普通のジャイロ4個と送信機のミキシングだけでも、以前苦労していたのがなんだったんだろう、って思うくらいに安定してます。-追記-とは言っても、ピタっと止まるわけではなく、それなりの安定性しかないので、次はマイコンを組み込んで制御してみるつもり、基本的にはクワッドと同じ考え方で行けると思います。こっちは完全自律を目標とせず、RCメインでコントローラを組んでみます。
2012.06.25
コメント(0)
-

フライを巻いてみた
フライフィッシングをやってる人が、自作のフライと針をくれた。なかなか見事なものです。針をくれたということは自分でも巻けってことだと思うので、バイスの代わりに手近な工具を探したらいいのがあった。糸がないので細いエナメル線を探してきた。こんな風に下巻きしたんだけど、羽とかなかったので、虫っぽい資材をいろいろ探した。で、手近な材料で見つけたのはこれ↓ ちなみにまだ生きてます。
2012.06.25
コメント(0)
-
egg-botっぽいモノ改め”ピン球bot”の自作その2、ハード完成
強度不足なままハード完成。ソフトは、Y君にお任せ!-追記-Y君ソフト製作中。ほぼ完成した模様。詳細はこちら↓http://eleclog.quitsq.com/2012/07/spg20-332-mp4401-3.html
2012.06.22
コメント(0)
-

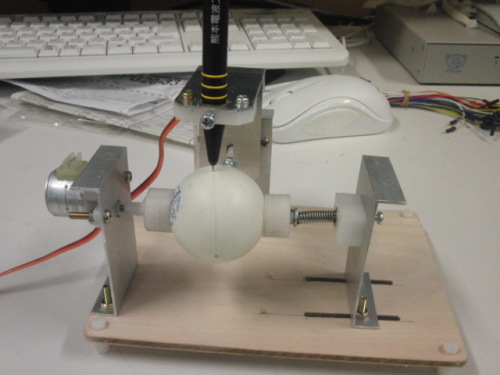
egg-botっぽいモノの自作、その1
雨でなんとなく気分が乗らず、ソフトを作るのはやめて雑多なイベントのデモ用に工作。まず、ステッピングモータに小細工。POM厚板を切り出して、旋盤でカリカリと削りました。できたのはこれ↓ ピンポン玉もうまく乗ります。反対側の押さえと、ペン用のモータも作りました。あとはペンの上下動の部分を作れば機構部品は完成。適当に細長い穴を掘ったベースを作れば多少寸法の違う球体なら書けると思います。作ってみてわかったのは、意外と強度が無い。本家のページを見直すとがっちりした構造になってて、卵をグリグリ回すにはこのくらいの強度は必要。ピンポン玉専用マシンにして、名前も”ピン球ボット”にしようかな。本家のegg-botはこちら↓http://egg-bot.com/
2012.06.21
コメント(0)
-

二重反転ブラシレスモータの取り付けに風車のようなベース
こんな感じで、現物あわせてで板金加工。発泡スチロール板をクロスした部分に取り付けます。モータは中間の3個の穴で固定。上下が反対に回ります。発泡スチロール板を少し掘り下げて、こんな感じの完成イメージ。motorTmazo二重反転 ブラシレスモーター EDCR-221613d
2012.06.21
コメント(0)
-
自転式の球形飛行体、自律飛行その4,スロットルを完全自律(追記あり)
しばらく更新してませんでしたが、自転式の球形飛行体のスロットル制御に結構手間取ってました。手動でほぼホバリング状態にスロットルを持ってきてその前後の制御をさせた時にはそこそこ安定するのですが、I制御でスロットルを0から自動であげていこうとするとブレが大きくてまともに制御できませんでした。原因は、超音波センサにあり、アナログ値で読み取ると不連続に大きなノイズが入るので、これをなんとかしないと制御ができません。かなりの比率でスムージングして、不連続なノイズは条件判断で抑えこんで、やっと安定した距離が取れるようになりましたがレスポンスがかなり遅れるようになりました。それに合わせてP制御とD制御の係数を下げて、やっとI制御でじわっと上昇して高度ほぼ一定でホバリングできるようになりました。やっと次に進めます。。。-追記-動画を追加しました。約20秒ホバリング、10秒かけて下降、停止するプログラムで飛ばした動画
2012.06.20
コメント(0)
-

磁気テープと磁性体と磁気記録
今ちょうど磁性体に関する授業をしているところなので、何か簡単な実験はできないかと思って、古いVHSテープを探してきました。そこで、蓋を空けて、テープを取り出し、引っ張って伸ばしてみます。すると、磁性体が浮き上がってくるので、使ってないヤマダポイントカードに擦りつけて、カードをピンと弾いてやると、磁気記録のパターンが現れます。セロハンテープでそれを写しとって白い紙に貼ってみたら、こんな風になりました。ちょっとやってみるには面白い実験です。
2012.06.14
コメント(0)
-

クアッドコプター(Quadcopter)自作その12、プロペラ変えました
久々にクアッドコプター、プロペラ変えました。前のプロペラは硬くて重くて中心がズレてて振動が大きかったので、軽い3枚ペラに変えてみました。静かで低回転でも揚力も大きく、2セルバッテリで十分浮きそうです。全備重量573gになりました。早速飛ばしたら、ふわっと上がってくるっと半回転していきなりペラ破損。動的なパラメータが全然違ったらしく無謀でした。でもプログラムと調整で安定して飛ばせそうな感じ。プロペラの選定を先にやるべきでした。
2012.06.13
コメント(0)
-
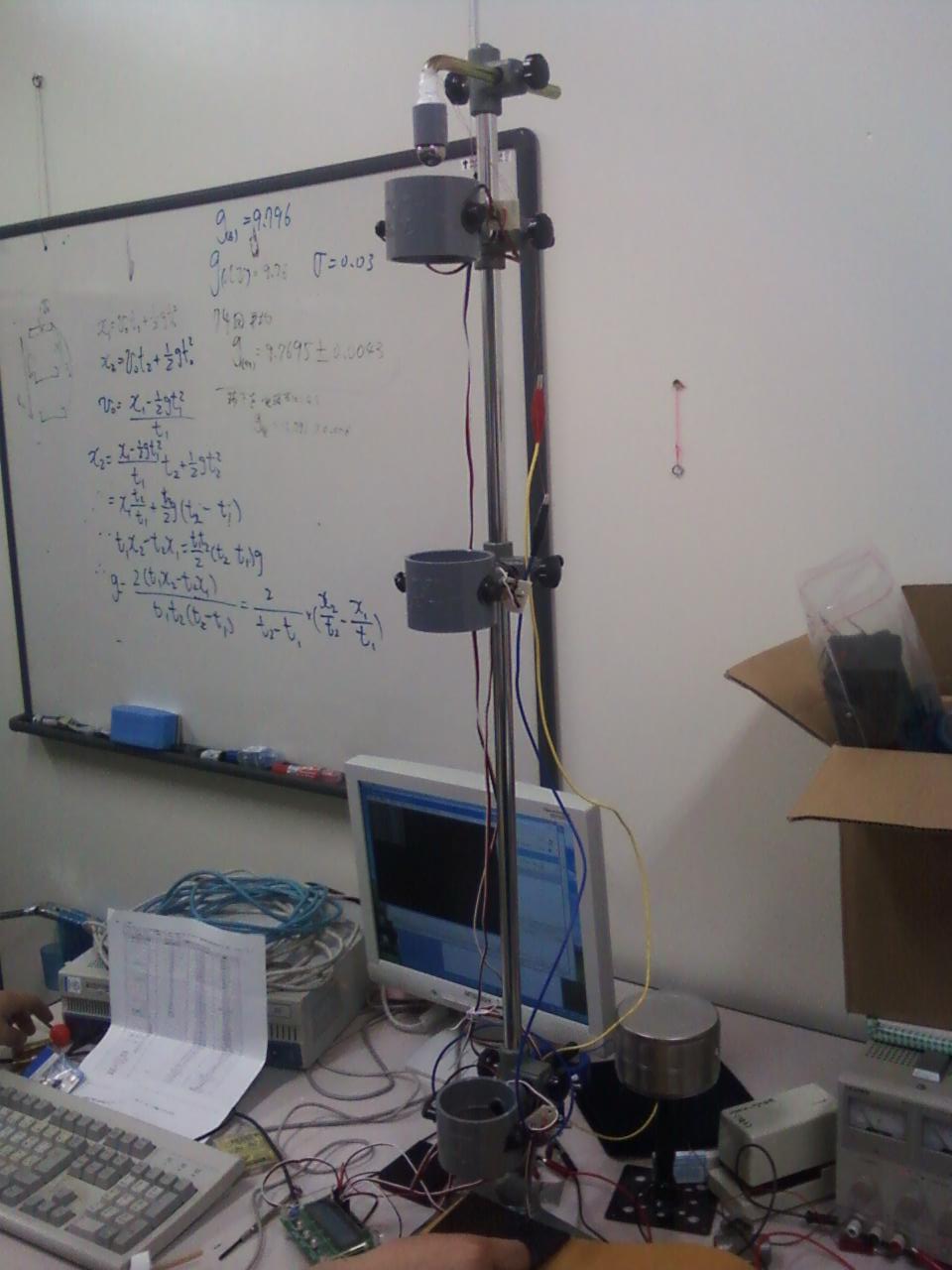
重力加速度の測定装置
同僚のK先生が物理の実験用に重力加速度の測定装置を作りました。振り子を使ったり、テープを引っ張って記録させたり、いろいろ方法があるのですが、やっぱり物体の落下を計測して、できるだけ高い精度の値を取りたい、とのことです。3箇所の光センサを通して時間を計測します。計測にはmbedを使います。金属球を手を離して落とすと微妙に位置がズレて、センサを切るタイミングが変わるそうで、上手に落とすための仕組み。電磁石で金属球を引きつけ、電流を切ることで無回転で摩擦なく落とすんだそうです。金属球の通り道↓時間をマイクロ秒オーダーでカウントして、3桁+αの精度がでるそうです。
2012.06.12
コメント(0)
-
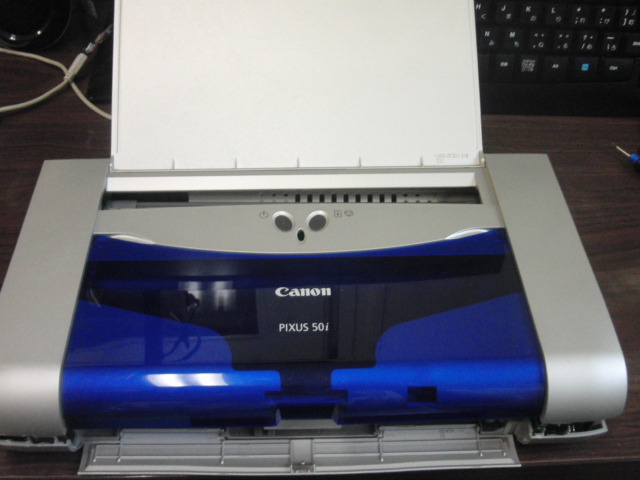
PIXUS 50i の分解・修理
紙送りができなくなってしまったので、分解してみた。原因発見、ギヤが割れてる。。。ギヤ1枚のために捨てるのもかわいそうだし、修理にだすのもコスト的に合わないし、ここは自分で修理。こんなところは接着剤では付きません。着いたとしてもすぐ剥がれるのがオチ。なので、ドリルで穴を空けて、細い針金で縛りました。いつまで持つかわかりませんが、ちょっと引っかかりながらもまわるようになったので、テストプリント!!カバーを戻して完成! と思ったら、ランプのカバーが外れてどっかにいってました。まぁ、細かいことは気にしません。その後検索したら同じ症状で故障した例がたくさん。欠陥商品かと疑いたくなりますが、ずいぶん前の製品なので許す。例えば↓http://plaza.rakuten.co.jp/vitaldigital/diary/201109260000/http://yuyustyle.ps.land.to/blog/2009/05/canon-pixus-50i-doesnt-work.html
2012.06.12
コメント(0)
-

ワイヤラッパー
学校の廃棄場所に捨てられていたそうで、学生さんが拾って来ました。34年前の製品です。ジュフロン線を買って持ってたのですが失くしてしまったので、抵抗の足をセット。巻き付きました。ワイヤラッピングは知ってたのですが使ったことなかったのでヘタです。隙間なくキッチリ巻けないとダメらしいです。多分使うことないなぁ。。。詳しくはこちらとか↓http://homepage3.nifty.com/alpha-1/computer/Wire-Wrap_J.htmlhttp://www-lab.ee.uec.ac.jp/equip/o_WSU-30M.html
2012.06.12
コメント(0)
-
自転式の球形飛行体、自律飛行その3,スロットルをPID制御
最初にラジコンで浮かない位にスロットルを入れて、手を離すと設定した高さ以下でPID制御が始まる。最初の設定レベル以上で制御し、Iがマイナスにならないよう制御範囲を限定して墜落を避けました。Dの効きが弱い、Iが強すぎ?のようですが、係数を調整すれば安定しそう。その動画→ 自転式の球形飛行体、自律飛行その3,スロットルをPID制御-追記-パラメータをちょっと変えたらいい感じになりました。次はホバリングから徐々に高度を下げて着陸させてみます。
2012.06.08
コメント(0)
-
自転式の球形飛行体、自律飛行その2、スロットルON-OFF制御
適当にPIDで飛ばそうとしたら失敗して落としてしまったので、まずはスロットルを適当なHigh-Lowの2レベルを高さを決めて切り替えて挙動を確認。遅れの影響で結構上下にふれます、という実験動画。細かいことでも記録してアップ、ブログですから…。その動画
2012.06.07
コメント(0)
-
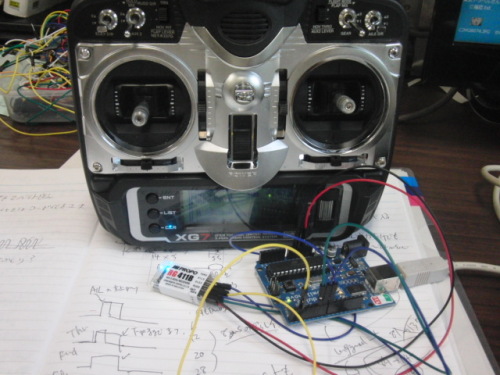
Arduinoでラジコンの受信機から多チャンネル信号読み取ってサーボ動かす
Arduinoでラジコンの受信機から4チャンネル分の信号をpulseIn関数で読み取って4個サーボやアンプを動かそうとすると結構難しく、サーボがバタつきます。飛行機を飛ばす場合はピクピクします。ヘリは安定しません。なぜかというと、pulseIn関数はパルスを待ってる間ほかの仕事ができないからのようです。4チャンネルを下手に読むと、20ms×4チャンネルくらいの時間がかかり、サーボの信号が途切れたりするっぽいです。昔のRC送受信機だとパルスがズレて出てるので、読む順番を工夫すると、半分の時間で4チャンネル読めます。2.4GHz帯だとその技が使えません。なぜならば、同時にパルスが出てるので。例えば、タイマー割り込みを使って数10ms毎に1チャンネルずつ読みに行くと、pulseIn関数の待ちが分散されて、サーボは安定します。でも4チャンネル分読むのに時間がかかり、その分レスポンスが遅れて、操縦が難しくなります。自律飛行機を作る場合、GPSを読んだりいろいろ処理がかさむので、pulseInを使わないで2.4GHz受信機を読む方法を考えました。パルスが同時に出ているのを利用して、パルスの一つを使って外部割込みを発生させ、パルスが立ち下がるまでの時間をカウンタを回して調べます。この方法だと、パルス発生のタイミングで測りに行ってパルスの終わりで終わるので、処理時間は2msほどです。最初はmicros()で時間を測ったのですが、値が安定しないのでやめました。リファレンスにはmilis()は正常に動作しないとありますが、micros()も怪しいです。分解能は悪く、カウント値で84-144,中央値115,差は60, ±30でした。分解能が低いですがレスポンスが良いことと数値が安定してることから、pulseInよりはましな感じです。Arduinoのライブラリに頼らずにポートを直接操作したりすればまだ手はあるんでしょうけど。みんな困ってないのかなぁ?と思って検索かけても日本語のページでは困ってる人や対処が見つからず、英語のページでは困ってる人を多く見かけたけど対処は見つけられなかった。Arduinoだけで自律飛行機を自作してる人ってあまりいないのでしょうか?
2012.06.06
コメント(0)
-
自転式の球形飛行体、自律飛行その1
球形にする前に、GPSによる水平面内の位置制御はおおよそ作ってるので、完全自律化を目指して今度はスロットル制御。超音波センサを取り付けて、一定高度になるようスロットルの調整を加えてみました。手で支えて動かした範囲だとプログラム的には問題なさそうですが、超音波センサの読みが安定しないので時々大きく振られます。センサの性能上振れるのは仕方ないとして、それでも飛ぶのか、振れが大きすぎて飛ばないのか?スムージングを強めたとしてレスポンスが間に合うのか?広いとこで飛ばしてみないとわからない感じです。
2012.06.05
コメント(0)
-
自転式の球形飛行体、マイコンを使って横方向の操縦
東西南北の方位に対して操縦します。行きたい方向に対して旋回しながら動き出すので、操縦性は今ひとつですが。操作を間違って画面からはみ出してる時間が多くてすみません。もう少し自転を速く機体を作ると、あまりブレなくなると思います。その動画→自転式の球形飛行体、マイコンを使って横方向の操縦
2012.06.02
コメント(0)
全21件 (21件中 1-21件目)
1
-
-

- 楽天市場でショッピング! 楽天市場…
- ワンピース ドレス フレア Aライン …
- (2025-11-20 07:20:14)
-
-
-

- ブログ更新しました♪
- 11月25日 記事更新致しました。
- (2025-11-25 17:23:31)
-
-
-

- 楽天ブログいろいろ
- 【祝・100記事】3ヶ月で毎日投稿を達…
- (2025-11-24 22:09:06)
-



