

2012年03月の記事
全19件 (19件中 1-19件目)
1
-

いただきモノ
つくばチャレンジが終わってしまった後にこんないただき物。電動車いすのベース。がっちりしてます。さてなんに使いましょうか。小物もいろいろ。このタイミングで槍の突いた物(ロボットランサー)まで。1年後に向けてチャレンジしようかな?これは初心者なのでスタンダードクラスで。
2012.03.30
コメント(0)
-
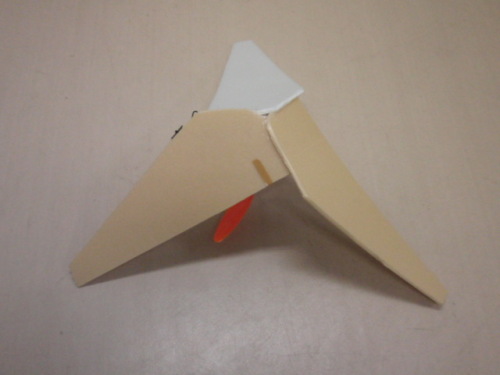
どこかで見たことがあるような飛行体、その5
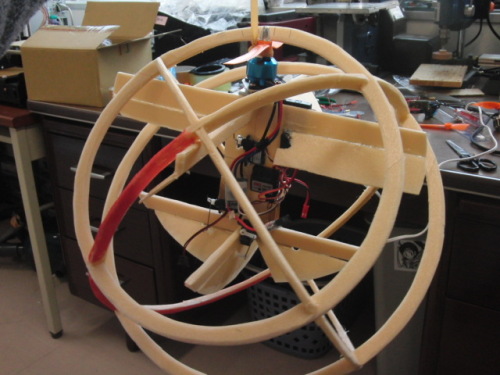
尾翼の効きが悪いので大改造しました。球形のガードと内部を切り離し、強度があまり無いのでゴムで釣った状態(あんこうみたいに吊るし切り)で作業。プロペラを2cm上に上げて、間を空けて1cm尾翼を上げて、尾翼面積を40%ほどアップ。舵の効きは良くなりましたが、ジャイロで安定化されてる感じがありません。主翼?のねじれで気流がねじれてるせいでしょうか?操縦が上手ければなんとか飛ばせるくらいには安定してきたと思いますが、自分にはまだ無理。もう少し安定化させるにどうしたらいいのでしょう?あと考えられるのは、主翼を大きくしてみる。重心位置を上下してみる。くらい。その動画
2012.03.30
コメント(0)
-
どこかで見たことがあるような飛行体、その4
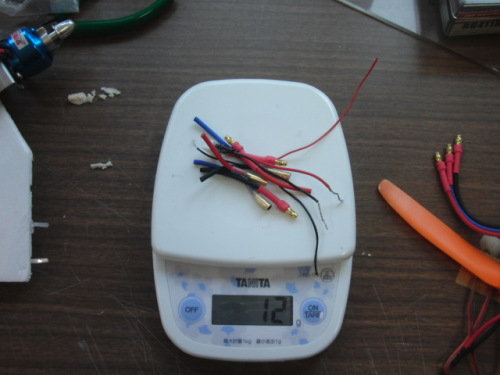
軽量化しました。コネクタを使わず切って直結、これで12gの軽量化。全備重量227gです。浮きそうなので調子に乗って外で初飛行。無残に落下して破損。(5分ほどで修理出来ましたが)トリム調整や練習なしで浮かせていられるほど簡単ではなかったです。その動画-> 球形飛行体もどき、初飛行は墜落・破損なのでやっぱりゴム釣りで地味に調整と練習中。ー追記ー電池が一つしかないので、1時間充電。数分調整のペースで細かい挙動確認。モータの軸ズレ直したり、翼面積をちょっと削ったり。ずいぶん安定してきたけど、手放しではいられない状態。多分これは今の装備だと原理的にしょうがない。それと、尾翼面積が小さくて、結構大きく切らないと舵が効かないので、ジャイロでの補正に遅れがでている模様。これは大幅な作りなおししか手がない。それでも、手放しでふわっというてるところを動画にとった、つもりがとれてなくて残念。そろそろ操縦に再挑戦したいところ。
2012.03.29
コメント(0)
-
どこかで見たことがあるような飛行体その3、どうやら失敗。
つくってみたけど、パワー不足で浮き上がりません。ジャイロを積む前はくるくる回りながらぎりぎり浮いたのですが、ジャイロを積んだら重量オーバーで浮かなくなってしまいました。手持ちのプロペラ、モータ、バッテリーではだめだったので、径やピッチの違うプロペラ、容量の違うバッテリーを買ってからまたトライしてみます。機体の回転を止めるのは思った以上にエルロン操作が必要で、この状態では、尾翼の効きが悪く、面積が足りないもよう。これを作りなおすのは大変です。なかなか難しいです。ゴムで釣って操縦性とジャイロの効果を確かめてみました→ その動画
2012.03.26
コメント(0)
-
4月中に・・・
いま気づいたけど、このペースだと4月中にブログが50万アクセス突破。ちょっときりがいいけど、最近アクセス減ってきてるので100万アクセスはずーっと先になりそうです。それまで続くかなー?本当はもう少し、それぞれの情報を詳しく載せていった方がいいのだろうけど、楽天ブログではタブ使えないし、ファイルが置けないし、ページ毎の文字数制限もあるし、外部への直リンクは基本的にルール違反らしいので、あんまり細かいことも書けません。電子工作に飽きるまでは、ぼちぼちやります。
2012.03.24
コメント(0)
-

ブックマーク
第2版がでたもよう。【送料無料】Arduinoをはじめよう第2版
2012.03.22
コメント(0)
-

どこかで見たことがあるような飛行体、その2
先日作った、どこかで見たことがあるような飛行体にメカ積みする前に、手持ちのモータとプロペラ載せて回してみました。心配してましたがパワー不足、あとちょっとというところで浮きません。大きめのモータ・ペラを購入すればいいのでしょうが、お金もかかるので再度工作。一回り小さいものを作り直しました。まずは、円板を3枚作ります↓組み合わせて完成↓比べてみるとこんな感じ、重量は約半分の50gです↓今度こそ浮くかな?
2012.03.21
コメント(0)
-
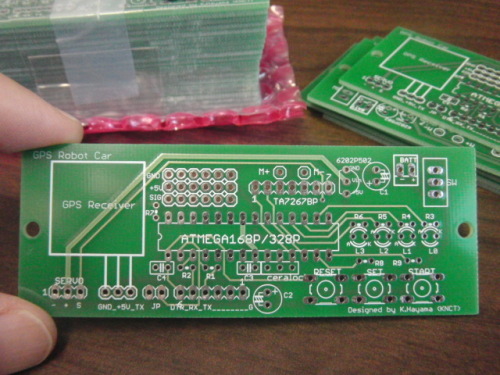
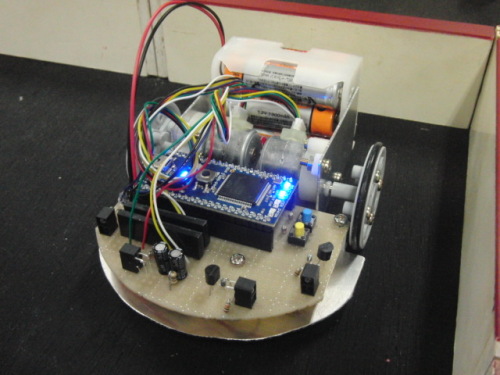
GPSロボットカーキット完成
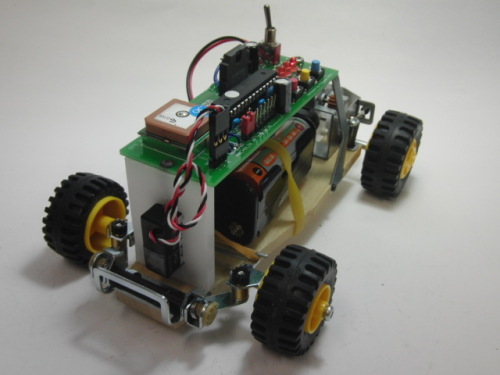
話が飛び飛びですが・・・先日できた基板に部品をはんだ付け、試作機に基板を載せ替えました。マイコンもサーボもGPS受信も問題なくできて、これでキット完成。いい感じでしょ↓市販の工作キットと、ちょっと改造と、ハンダ付けと接続、組み上げなんですが、一般的な中学生にはちょっと難しいかも。高校生以上くらいの電子工作ネタで使えそうです。--追記--実際に走らせてなかったので、走らせてみたら、細かい問題発生。プログラムの修正をしていたらなぜか設定した座標がおかしくなり、半日悩んだら、標準の関数を使ってるのにある条件の時にポインタの扱いがおかしくて、座標の配列のところまで悪さしていたもよう。文法的な間違いはなかったので、えらく手間取った。結構厳しい点もあった。使用してるGPSの精度が悪いのである程度の速度で動いてないと、正しい方位を出さない。なめらかな平地なら問題ないけど、ガタガタの路面だとあまり速度が出ずに方位をとれず、まともに走らない。ベースの車体が良ければ問題無いので、良しとしましょう。
2012.03.21
コメント(2)
-

製作中の機体がどこかで見たことあるような飛行体に似てきてしまった・・・
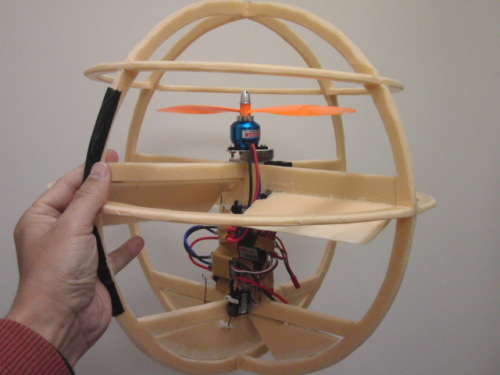
プロペラ一つで自律して飛ぶ飛行体を作ろうとしてるのですが、プロペラと尾翼のガードを軽くてそれなりに強度のある形でつくろうとしたら、どこかで見たことがあるような飛行体に似てきました。でもあっちは開発期間1年半でなんとか省が大々的に報じてるらしいし、こっちは違う目的で作ってる飛行体にガードつけただけだし、この形の開発に取り掛かってからはまだ4時間半だし、似ててもきっと別物だろうな、って感じでご容赦ください。あと、普通にラジコンの送信機でミキシングができる数のメカとジャイロを積んだら飛ばしてみます。メカ積みも半日くらいで出来ると思うので、近いうちに飛ばしてみたいです。適当な図面とコンパス↓切り出した部品↓組み立てたところ↓機体重量は100g。ちょっと思いけどぎりぎり浮くかなぁ?
2012.03.19
コメント(0)
-
自転式飛行体、高度100m超まで上昇
自転しながら飛ぶ飛行体を作りました。地磁気センサで向きを検出しRC信号とミキシングして回転しながらでも操縦できるようになってます。スロットル、尾翼の2自由度で操縦。(ほか、ジャイロによるスタビライザーあり)GPSを搭載して自律飛行を目指しプログラムまでは組んでますが、まずはRC操縦しています。温度センサを搭載し、GPSで計測した高度に対する温度計測をおこなってみました。獲得高度は106m。下ろすとき急にスロットルを戻したので頭が下を向いてしまい制御不能に、落下させてしまいましたが、グランドのほぼ中央で上げていたので敷地外に落ちることはなく、プロペラの破損だけですみました。残念ながら、三脚たてて撮影したので、カメラが追っていないのと、ピンぼけに気づきませんでした。動画-> 自転式飛行体、高度100m超まで上昇
2012.03.14
コメント(0)
-

基板もう一つ
ちょっと余計に注文しました。前に作った39mmのステッピングモータ用に丁度いいサイズ。
2012.03.12
コメント(0)
-
GPSロボットカーキットの基板到着
注文していた基板が到着しました。近いうちに部品を載せて、前に作ったユニバーサル基板と取り替えます。
2012.03.12
コメント(0)
-
くるくる飛行物体
いろいろ考えながら試作中。こんなのとかー> 動画こんなのとかー> 動画ほかにも思案中…
2012.03.08
コメント(0)
-

ローラーリストボール
ぐるぐる回るものを考えているところで、こういうものを持ってる人が面白いよって言われてやってみたら地味に面白かったのでネットで2個注文。2個あると両手でぐるぐるできます。体のバランスは大事ですしね。高速回転で手首の鍛錬!遠心力をコントロールすることによって手首、前腕部、指の筋肉、握力を鍛えます!鉄人倶楽部 ローラーリストボール IMC-59カワセ/鉄人倶楽部 ローラーリストボール IMC-59 (トレーニング器具・握力)
2012.03.07
コメント(0)
-
UFOのようなものを作ってみました。
こんな感じで発泡スチロール板を3枚組み合わせてUFOのような飛行物体を作ってみました。メカはこんな感じ。パワーをかけて本体をすっと持ち上げるようにすると、結構安定して飛びました。その動画ー> UFOのようなものところが調子に乗って飛ばしていたら、メカ、電池をガムテープで貼りつけただけだったので、飛行中に電池のテープが剥がれ、プロペラに接触してクラッシュ!!!無残な姿になりました↓その残念な動画ー>UFOのようなもの、調子に乗ってクラッシュ不幸中の幸いで電池は無傷。リポなので恐ろしいことになるところでした。
2012.03.06
コメント(0)
-
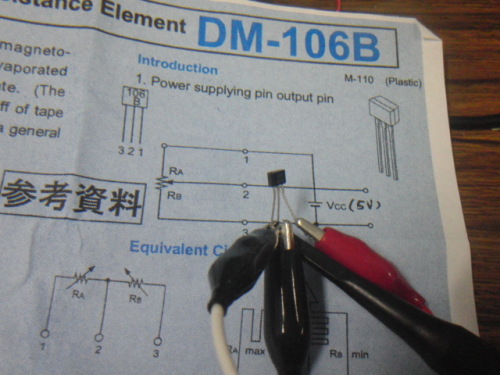
磁気抵抗素子
電子材料の講義に出てくるので、磁気抵抗素子を買ってみました。磁界の方向で抵抗が変化し、ボリュームのような働きをするので、電源、GNDを接続して、信号を取ってみます。モータの先に磁石を取り付けて回転させて近づけてみると、正弦波状の信号が得られました。でも変化はかなり小さいです。実験時で電源5Vに対して変化は100mVくらい。アンプが必要です。その動画ー> 磁気抵抗素子の実験
2012.03.06
コメント(0)
-

同じコンセプトのマシンを何度も作り替えないので・・・
安い材料でトレーサーの実験機作ろうと思いましたが、 ->そのエントリモータの特性を試しているうちにやっぱり物足りなくなって、それなりに良い部品を使って作ることにしました。モータは、以前ある方から頂いたminimotor、22:1のギヤダウンされてます。ギヤ比が大きすぎですが、それは仕方ないとして、これを3つ組み合わせれば、機械的な加工が省けてお手軽にマシンを作れそうです。コンセプトはこんな感じ↓ 200g位のマシンになりそうです。
2012.03.05
コメント(0)
-
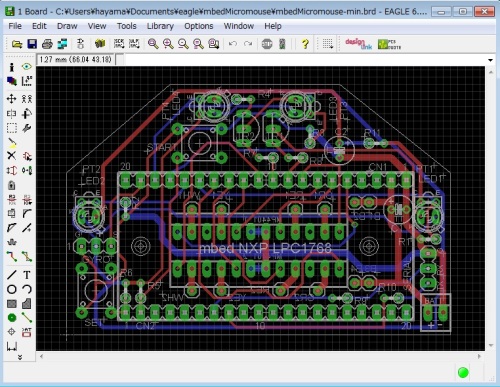
mbedでマイクロマウス、基板設計できたので終わり。
記憶にあるうちに基板設計までやりました。前の書き込みでは部品がスカスカだったので、ステッパーマウスによく使われる39mm角のステッピングモータ用の寸法で部品を詰めて作ってみました。放熱がよくないですが、モータドライバは裏面においてみました。(Arduino版のマウス基板よりちょっと小さいくらい)mbedは高性能なのでソフトしだいで結構な戦力が見込めるはずです。これでmbedによるマイクロマウスプロジェクトは終了。フリーページにこれまでをまとめておきます -> mbedでマイクロマウス
2012.03.02
コメント(0)
-
mbedでマイクロマウス、ソフト(ほぼ)完成。
回路最確認して電源投入。問題なし!よかった…続いて、各パーツの動作確認。モータには最初ポート指定で0,1パターンを入れて正しく励磁され、順送りすると回転することを確認。左右ともOK!次にセットスイッチ、スタートスイッチの確認、これも問題なし。次にセンサの動作、最初はフォトトランジスタの値を読み10倍してそのままボード上のLEDにバイナリで表示。続いて、赤外線LEDで前をパルス照射、バックグラウンドと差分を取って反射光を検出して表示。距離センサが上手く動きました。感度が低かったので、照射から値の取り込みのタイミングを調整。うまくディレイを入れると感度がちょっと上がりました。後は、以前作ったArduino版のマイクロマウスのソフトを移植、ほぼ完成。これで心置きなく基板の設計を進められます。動画-> mbedマイクロマウス、センサチェック動画-> mbedマイクロマウス、Uターン走行動画-> mbedマイクロマウス、左手法による探索
2012.03.01
コメント(3)
全19件 (19件中 1-19件目)
1
-
-

- 花、風景の写真を撮るカメラとレンズ
- ★ヤフオクでSONYデジカメを落札、同機種4…
- (2025-10-04 17:30:05)
-
-
-

- 楽天市場のおすすめ商品
- ✨ 【愛車復活!】魔法の添加剤「FCR…
- (2025-11-26 01:22:08)
-
-
-

- Amazonマケプレ
- #PR 28%OFF 【毛髪診断士®共同開…
- (2025-11-25 23:52:10)
-



