

2012年05月の記事
全19件 (19件中 1-19件目)
1
-
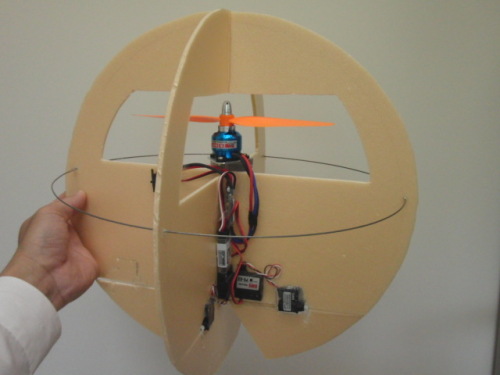
自転式球形飛行体のベース、試験飛行
プロペラ反力を打ち消さず、自転したまま操縦する自転式飛行体の製作途中。円板を2枚組み合わせた球形飛行体にして機体をプロペラガードにして安全性を高めました。マイコンを組み込む前の安定性を見てる動画。スロットル操作だけでおおよそ同じ範囲で漂っています。リポ400mAh3セルで7分弱回しっぱなしです。安定性も安全性もあり作りやすいので、この形をデフォルトにしようと思います。その動画→ 自転式球形飛行体のベース、試験飛行--追記--マイコン搭載完了!自転式球形飛行体、尾翼の制御 を動画に撮影しました。飛行中に機体が回転するのですが、機体の回転に合わせて尾翼を同一方向に傾けることにより任意の方向への移動を可能とします。
2012.05.31
コメント(0)
-
プロペラが問題?
書類仕事もあって、クアッドコプター進んでませんが。。。振動をどう対処すればいいのかyoutubeのQuadcopterの動画を見てて思ったのは、ちゃんと飛んでるやつは、自分のと比べてモータやペラの振動が小さいなぁ、ということ。入手できた逆ピッチのAPCのペラは結構重く15g,手持ちのGWSのペラ5gの3倍。丈夫なんですが手持ちのモータと軸径があってないこともあって中心が出てないし振動が大きいのはこのせいかも。ということでGWSのの軽いペラで逆ピッチが入手できるものを探してからまた続きをやります。
2012.05.25
コメント(0)
-
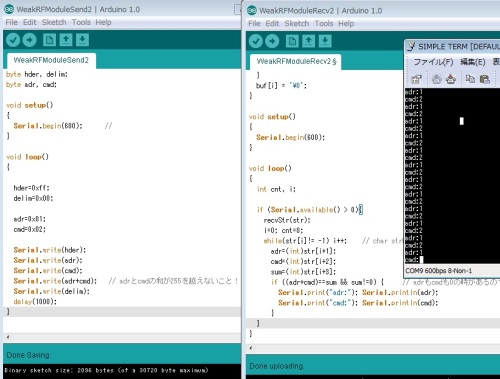
微弱無線モジュール、その3で終了。
プログラム作って送受信してみました。アドレスとコマンドとして2バイトのデータを送るとして、アドレスとコマンドの和をチェックサムとし、ヘッダとデリミタをつけて送ります。受信側ではデリミタを監視して、受信したらそこまでのデータのヘッダを探してその後の2バイト抜き取ってチェックサムが正しければOKとしました。ノイズの影響で1度で確実に送れませんが、数回送れば受信できるので、これにて終了。まとめー> 微弱無線モジュール
2012.05.23
コメント(2)
-
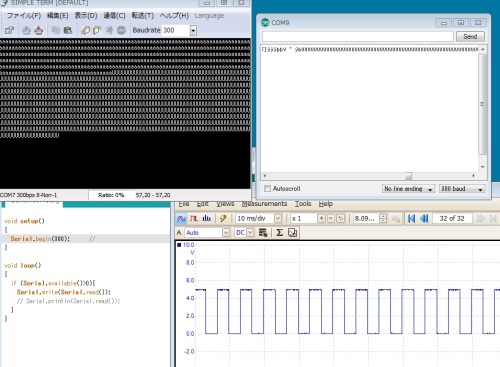
微弱無線モジュール、その2
昨日の続き。素直に動かないのでオシロで信号を確認。信号なしの場合、ミリ秒オーダーのノイズがひっきりなしに出てる。これにシリアル信号乗せても判別できるはずがない。おもいっきり速度を下げて300bpsで大文字の”U"、コードはバイナリで01010101を連続して送ってみると認識されたのがこちら↓速度を倍の600bps以上に上げると、信号にこんな風に隙間が開く。(この間にノイズが入ったらダメになるかもしれない?)1200bpsだと、信号の最初がなまって読み取れない。つまり、300bpsまたは600bpsでソフト的に送り方を工夫してエラー処理を行えば送信できそうではあるけど、やっぱりちょっと面倒。
2012.05.23
コメント(0)
-
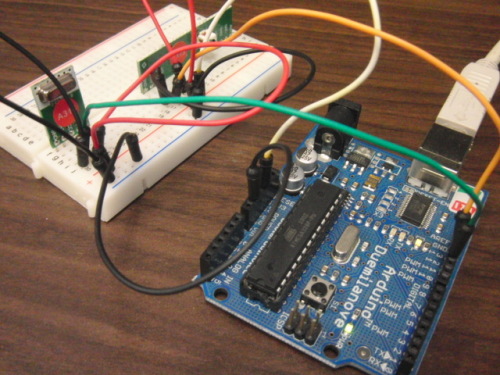
微弱無線モジュール、使うのはちょっと面倒そう。(修正)
昨年度に買ったこれ↓http://strawberry-linux.com/catalog/items?code=82003http://strawberry-linux.com/catalog/items?code=82004使ってみました。まずは、Arduinoから、デジタル信号を周期的にON-OFFさせて無線で送信、同じArduinoで受信してLEDを点滅させてみました。目視だと問題なく点滅してる。ただ、微妙にノイズが乗ってる感じがするかも。次に、USB-シリアルポートを使ってシリアル信号を無線で送信、Arduino側で受信うまくいかない、(削除)何も送らなくても不規則な値のら列を受信し続けています。やっぱりノイズを適当に解釈して受信し続けているようです。やはり、シリアルポートを直接使って送受信することはできないようです。プログラムでノイズを判別して、誤り検出を含めてデータ送受信する必要がありそうで、ちょっと面倒ですね。-追記-昨日は、信号が反転しているかもしれないのでトランジスタ1石で反転してみたって書きましたが、反転してるわけではなかったのでその部分を削除しました。
2012.05.22
コメント(0)
-
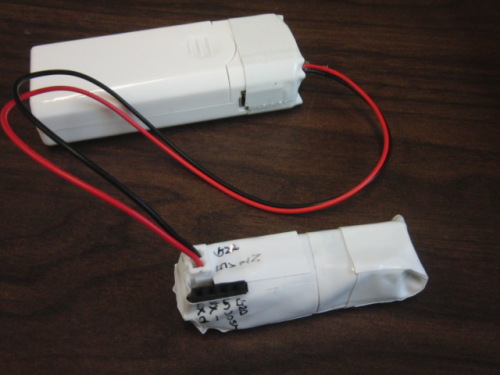
加速度+ジャイロをBluetoothで飛ばしてスポーツの練習応用、終了
ラケット振ったりするなら、スイングスピードに関する信号も取りたいよなぁ、と思って残りのアナログポートにも入力できるように端子を出しました。ジャイロセンサをこんな風にパックして、接続。踏み込みによる重心移動とスイングスピードがほぼ同じでピークを示すデータがとれました。テニスやってる先生と話してみました。データを取るとこうなるというのは面白いけど、練習に使えるかは疑問。上級者なら詳細なデータが取れるとそれなりに活用方法はあるだろうけど、必要なデータを得るには、種目に特化してセンサ系を組んだほうがいい。ヘタな人がヘタって分かるデータがとれたからって、どうなの?って結論。なので、電子工作としてはここらで終了としますか。。。まとめ→ 加速度をBluetooth送信
2012.05.22
コメント(0)
-
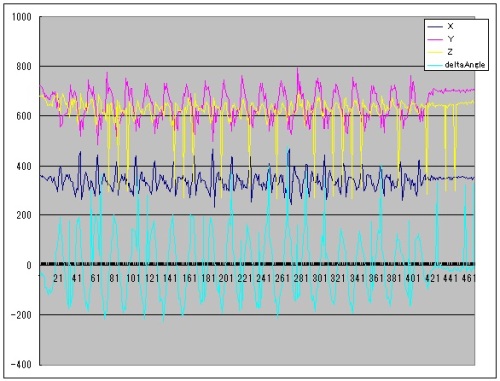
加速度+ジャイロをBluetoothで飛ばして、スポーツの練習応用
先日作ったセンサの応用に簡単な実験。卓球を5年くらいやってた人(自分)のヘソ前にセンサを付けて素振りした時のセンサの値をログにとってグラフ化。分析してみると、こんな感じ↓結構簡単におもしろいデータが取れそうなのでちゃんと研究してる人いそうだなぁ、と思って検索したらいらっしゃいましたので、ブックマークしておきます。例えば↓http://www.rcp.keio.ac.jp/sip/technic_patent/technic/doc/ohgi.pdfhttp://toragi.cqpub.co.jp/Portals/0/backnumber/2010/10/p172.pdf学校の部活の指導用などに、安価に組み込めるといいですね。
2012.05.21
コメント(0)
-
クアッドコプター(Quadcopter)自作その11、制御のタイミングについて
現状の制御ループについてまとめます。このままで良いかはわかりませんが。1)制御ループは、 1周期の時間計測、3軸ジャイロ、3軸加速の読み取り、 時間で補正してジャイロの積算により角度の算出、P,I,D制御値の計算 を行なっています。通常3ms程度で回っていますが、割込み等が入ると10ms 以上かかる時があるので角度計算に時間補正は必須。2)制御ループ内で時間をカウントし、およそ20ms周期でモータ出力を制御3)100ms毎に割込みで、R/C受信機を読み取り。4)外部割込みで超音波線センサのパルスを読み取り。5)GPSはシリアル通信で読み取る予定。
2012.05.19
コメント(0)
-
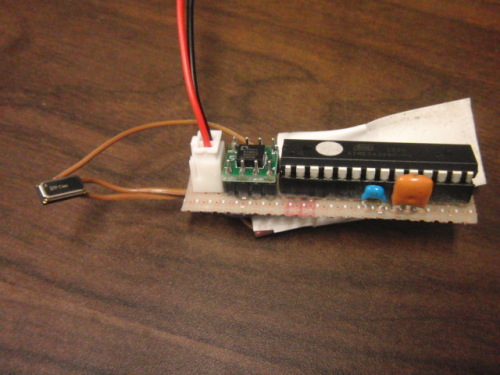
3軸加速度+1軸ジャイロセンサをBluetoothで飛ばす。
Arduino(ATmega328)のアナログポートは6ポート、昨日作った3軸加速度だけではあと3ポート空いてるので、ジャイロを追加してみました。こんな感じ↓一緒にまとめてビニールテープでぐるぐる巻きにして動作確認。角度もオフセットをキャンセルした電圧のよみを積算しただけの値を連続して出力。またちょっと夢が広がります。
2012.05.18
コメント(0)
-
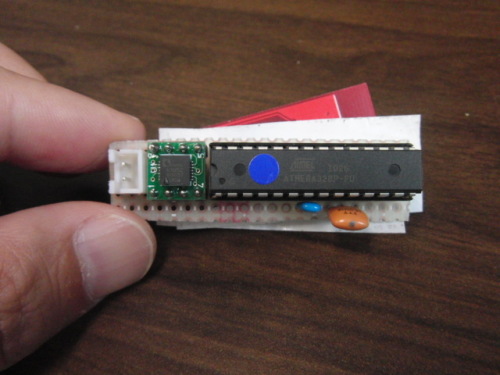
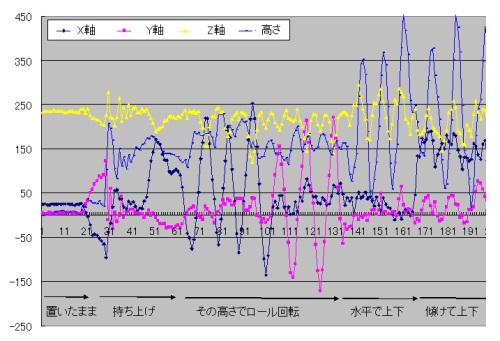
3軸加速度センサの値をBluetoothで飛ばすものを作ってみました。
同僚と話をしててあったら何か使えるかなと思って、2-3時間で工作。Atmega328と秋月さんの3軸加速度センサと端子を並べてハンダ付け。3軸加速度の値はアナログ値でマイコンで読み取り。裏面は、Bluetoothモジュール。5V電源は、以前購入した3V->5Vの携帯用充電器を加工。とりあえず、ビニールテープでぐるぐる巻きにして、こんな感じになりました。プログラムと動作状態はこんな感じ。X,Y,Zの値がコンマ区切りでダダ流しでPCのに送られます。グラフ書いてみたところ。いろいろ面白い使い方ができそうです。
2012.05.17
コメント(0)
-

クアッドコプター(Quadcopter)自作その10、超音波センサ付けました。
AR.Drone借りてきて飛ばしました。この安定感には脱帽です。闘志が湧いて来ました。大きさを比較すると、自作のクアッドコプターと偶然にもほぼ同じ。発泡スチロール板でガードを作ってもいいかもしれませんね。AR.Droneを操縦して、高さ方向の制御をかけた方が操縦しやすいなぁ、と思ったので、早速ですが超音波センサを取り付け。置いた状態では地面に近すぎですが、地面から2センチ位までゆっくり上昇・下降できれば御の字です。使った超音波センサの信号は、アナログ、パルス幅、シリアルの3通り出てますが、今回はパルス幅を読み取ることにします。比較した結果、誤差と変動がすくなく安定した距離が読めます。マイコンの処理がだんだんと込み入ってきましたが、ArduinoのDigital 3 pinに接続して、割込み処理でパルス幅読み取りを行なってみるつもりです。Android端末/iPhone/iPad/iPod touch等スマートフォンで操縦!新感覚Wi-Fi コントロールラジコンヘリコプター!ラジコン ヘリ(室内・屋外) Android端末/iPhone/iPad/iPod touchで操縦! PARROT AR.Drone楽天から買えるのはこれ↓ どんな信号がでてるかは不明。超音波センサー USTX-1(送信部)
2012.05.17
コメント(8)
-
クアッドコプター(Quadcopter)、自作その9
3軸加速度センサによる高さの検出。3軸のオフセットをキャンセルしたあと3軸を合成して全加速度の変化が高さ方向の変化だけによるとして高さを計算してみたらこんな感じ。角度も使えば横方向の移動も分離できるけど、不確かさがますので、まずは高さ方向だけパワー制御に加えてみる。-追記-スロットルがじわっと効いてくるようにプログラム、もちろん緊急時はすぐOFF.加速度センサにより上下動を検出して、モータのパワーに補正を加えるプログラムを追加してログとってみたグラフ↓思った通りにはできてます。飛ばしてみないと、これで良いのかどうかは分かりませんが。パワーを上げた時の振動を加速度センサが拾ってて、この時コントロールが効くかどうかも不安な感じです。-更に追記-加速度センサによる上下の調整を入れて飛ばしてみたら上手くいきました。ゲインが大きいと、浮き上がると同時にストンと落ちるような動作が起こり、ゲインを調整してやるとスムーズに浮上出来るようになりました。これまで、下の図のように、浮上時にバランスが崩れて上に上がらないことが多かったのですが、加速度センサのおかげて浮上時にバランスが崩れた時も斜め上への加速度を検出して少し押さえてくれるので浮かせるのも楽になりました。次は、水平方向のオフセットのズレを加速度センサとジャイロを関連付けして自動補正させることを考えます。
2012.05.15
コメント(0)
-
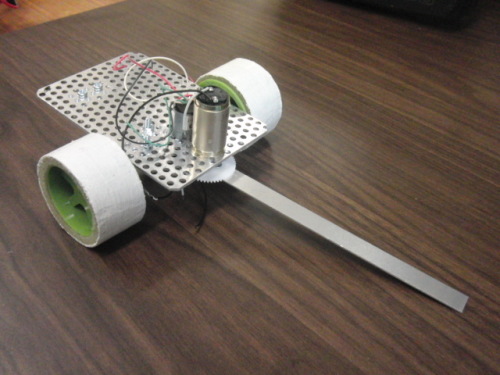
ロボトレーサ2号機、その1
今年の学生F君は頑張っています。1号機と違うコンセプトで作ってる機体のおおまかな形ができてきました。最終的には200-250gの機体になりそうですがパワーはあります。裏面↓ モータはギヤ付きのコアレスモータを3個、タイヤとセンサ振りに使ってます。センサの角度と走行距離を2相エンコーダで読み取り、モータのパワーにフィードバックして走らせます。--追記--バッテリーの収納と、基板の外形加工まで出来ました。本体ができたので、次は回路の製作。
2012.05.15
コメント(0)
-

クアッドコプター(Quadcopter)、自作その8
PIDを前より細かく設定できるようにして更に小さい範囲で試したら水平の安定が取れそうなところまできました。スロットル操作に敏感すぎるので、次はスロットルと関連付けたI制御を入れてみようと思います。その動画落としてぶつけてプロペラ破損、こんな感じでだましだまし修復↓テープで貼ったり、ピタガンで補修したり。
2012.05.15
コメント(0)
-
クアッドコプター(Quadcopter)、自作その7
進捗状況。プログラムを改良して、やっと浮かせられるようになってきました。良いパラメータを探せばもう少し安定できるようにはなると思います。その動画どこをどう変えたかというと、1)ラジコンの受信機やセンサとマイコンの通信が不定期に入ってくるので、delayを入れてサンプリングの間隔を広めにとっていた。 -> delayなしで時間間隔を計測しながらそれを考慮してサンプリングを繰り返すようにした。その結果、以前より多いデータ点数を使ったスムージングができるようになり、微分制御での誤差の影響を抑えることができるようになった?2)サンプリングのたびに姿勢制御を行なっていた。-> 両者を切り離した。計測した時間を積算して、おおよそ一定周期毎に姿勢制御を行うようにした。
2012.05.14
コメント(0)
-

processingで簡単なプログラム作って…
理論的には解くのは自分の頭では無理なので、PIDのパラメータを適当に探す感覚を磨くために、processing で簡単なモデルで応答の遅れのある場合のシミュレータを作って、パラメータを変えながらうなずいてみたりしてました。
2012.05.13
コメント(0)
-
クアッドコプター(Quadcopter)、自作その6
進捗の記録。今日は時間ができたので、ソフトの続き。本体の振動やセンサのノイズや受信機読み取りの処理のタイミングで時々外れた値がでて、それで微分(差分)制御に大きな誤差が乗り安定を乱していることがわかり、微分値をスムージングで対処してみたら、ちょっと安定した。地面すれすれ(5cm位)で操縦練習もかねて浮かしてる分にはいいけど、それ以上上げると振動が始まり飛ばせない。比例と微分とスムージングの係数をボリュームで調整できるようにして状態確認中。半歩進んだ感じだけど、まだまだ・・・
2012.05.10
コメント(0)
-

クアッドコプター(Quadcopter)、自作その5
学生のY君がボディを改造。剛性が低かったで、少し太い角材を使って、長さ1/2で作り直しました。これで剛性の問題はなくなったようですが、機体のレスポンスが早くなって、安定させるのが更に難しくなりました。ジャイロや加速度センサのログ取り直しです…。--追記--ラジコン技術で先月から、マルチコプター入門の特集をやってます。記事を読んでたら、見落とがあることがわました。なのでGWの子守の合間はプログラム修正。なんだか上手くいきそうな予感。【送料無料】ラジコン技術 2012年 05月号 [雑誌]
2012.05.02
コメント(0)
-
クアッドコプター(Quadcopter)、自作その4
前と比べてソフトを改良しました。でも機体の剛性が低いようで、細かい振動をジャイロと加速度センサが拾ってしまい、制御が上手く効いないようです。もう少しパラメータを?いじって改善されなかれば、機体を改造するつもり。その動画→ 自作クアッドコプター進展
2012.05.02
コメント(0)
全19件 (19件中 1-19件目)
1
-
-

- 新製品発売情報・予約情報
- 喜怒哀楽by増田貴久
- (2025-02-14 15:21:13)
-
-
-

- 楽天アフィリエイト♪
- [楽天市場]「ヒーター」「ポータブ…
- (2025-11-25 18:16:13)
-
-
-

- 【楽天市場】☆☆楽天おかいどくお買い…
- 先着クーポン【公式】&be(アンドビー…
- (2025-11-25 07:20:04)
-



