

2012年04月の記事
全20件 (20件中 1-20件目)
1
-
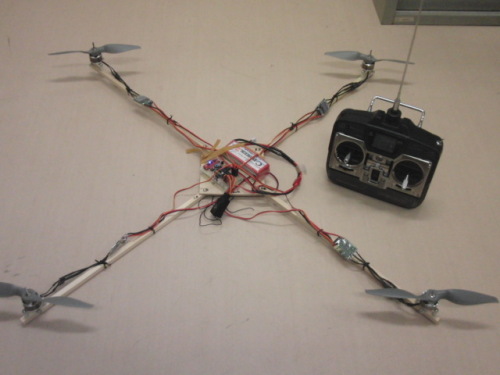
クアッドコプター(Quadcopter)、自作その3
制御プログラムを書き始めました。2.4GHzのラジコンの送信機の信号読取が上手くいかず、2時間ほど悩みました。信号をオシロスコープで確認したら、信号の出方が思っていたのとずい分違い、プログラムで解決するには手間が掛かりそうなので、古いラジコンの送受信機に取り替えました。これで先日作ったデルタ翼機のプログラムを元にクアッドコプターの制御に書き換え。スロットルの信号を4つのロータに分配、エルロンで左右2こずつのロータに強弱をつけ、エレベータで前後の2こずつのロータに強弱をつけ、ラダーで、対角のロータ2こずつに強弱をつけて、基本的な操縦のミキシングをつくりました。そのあと、各軸のジャイロの信号を対応する対角のロータの強弱に加え、ヨー軸については、ラダーと同じように4ローターに強弱を加えてみました。安定性はありませんが、もうちょっとで飛ばせそうです。必要な部品はそろっている状態で一から始めてここまでで約10時間。とりあえず形だけつくるならクアッドコプターもそう大変ではなさそうです。でも安定して飛行させるには、ここからがエンドレスですね・・・・。動画はこちら↓ クアッドコプタージャイロの動作確認クアッドコプターを少しだけ浮かせてみた
2012.04.26
コメント(0)
-
クアッドコプター(Quadcopter)、自作その2
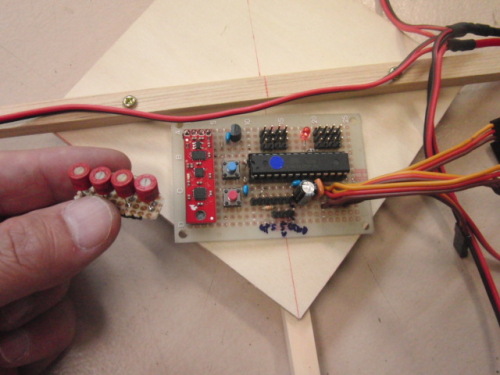
基板のハンダ付け終了。午後から回路の最チェックして火入れ。調整用のボリュームは着脱式にしました。いったん調整したら外してアナログセンサを接続できるように考えました。配線イメージ。全備重量は610g。ちなみに、ここまでの製作時間は約5時間。
2012.04.25
コメント(0)
-
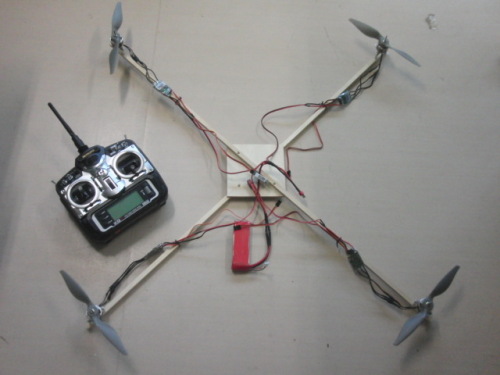
次は、クアッドコプター(Quadcopter)製作中
檜の角棒を買ってきて、クロスで固定し、クアッドコプターの自作中。飛ばしやすいように大きめ、およそ2時間でここまでできました。IMUなしで飛ばせる人ならこれで完成ですが、自分には当然無理なので、次は基板製作。昨日試した、9軸センサーとラジコン受信機をArduinoで読み取り制御してみます。上手く飛んだら、GPSも積んで自律化の予定。-追記-基板作製途中、今日はここまで。買ったほうがたぶん簡単↓小型クワッドコプタークアッドコプターT80
2012.04.24
コメント(0)
-
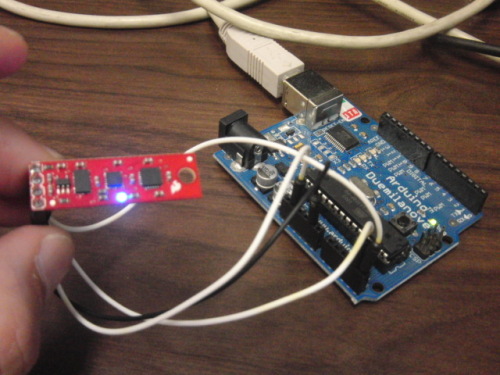
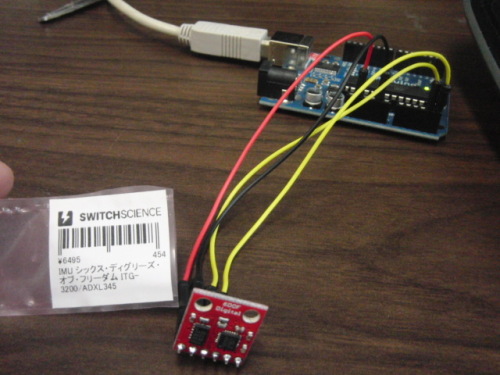
IMU ナイン・ディグリーズ・オブ・フリーダム-センサースティック
スイッチサイエンスさんの商品の、IMU ナイン・ディグリーズ・オブ・フリーダム-センサースティックを動かしてみました。http://www.switch-science.com/products/detail.php?product_id=675メーカーのページにいってもサンプルが無かったので検索したら、6軸センサにはサンプルのリンクがありました。http://bildr.org/2012/03/stable-orientation-digital-imu-6dof-arduino/これに3軸磁気センサが付いてるので検索すると、こちら↓ にありました。http://bildr.org/2012/02/hmc5883l_arduino/この2ヶ所でダウンロードしたサンプルをミックスして動かしてみたら、すんなり動きました。
2012.04.23
コメント(0)
-
はんだづけカフェ
行って来ました。会員証を頂いたのでその写真↓ あと、帰りがけにナノラボも覗いて来ました。いいですね。http://nanolab.jp/
2012.04.23
コメント(0)
-

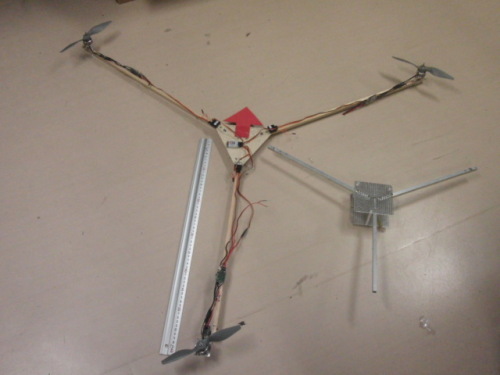
トライコプター(tricopter)R/Cは完成でいいかな?
トライコプターをまた飛ばしました。いちおう飛んだのでR/Cは完成ということにしときます。このあと操縦ミスで落として壊してしまいましたが。あとは地道に操縦練習します。トライコプターの動画フリーページにまとめました→ トライコプター(Tricopter)の製作
2012.04.23
コメント(0)
-

トライコプター、ちょっとだけ浮いた
本体を木組みで大きく作りなおして、安定性が増して、ちょっとだけ浮きました。ジャイロの調整と送信機のミキシングとトリム調整すれば、もうちょっとで飛ばせそうです。動画はこんな感じ
2012.04.18
コメント(0)
-
トライコプター作り直し。
トライコプターその後。前に作ったものは、ジャイロの感度を上げるとハンチングをおこし、感度を下げると安定が悪く、操縦が極端に難しくなりました。大きくすると安定性が増すそうなので本体を作りなおすことにしました。木の棒を買ってきてサーボやアンプのケーブル長で最大の大きさになるように作り直し。あとちょっとのところ、電源ラインを接続してケーブルをまとめれば完成。
2012.04.17
コメント(0)
-

ロボトレーサーのタイヤとセンサ配置を改良
昨年作ったロボトレーサー、タイヤのグリップが弱かったので何通りか作って試してみましたが、結果的にはミニッツのハイグリップタイヤを2個重ねた物が一番グリップが良かったです。次に、ターン途中でマーカーが上手く読めなかったので、この部分でカット。少し広げて曲げて、マーカーを読みやすくしました。もう少し幅を広げたいところですが、そうなると最初のコンセプトが狂ってくるので、これ以降はソフトで対応。(最初のコンセプトとは、センサ全域でリニアに位置をとれる配置。よく考えたらこのコンセプトはあまり意味なさそうではありますが、これはこれで完結として。)あとは、数ヶ月かけてソフトをぼちぼち改良。
2012.04.17
コメント(0)
-
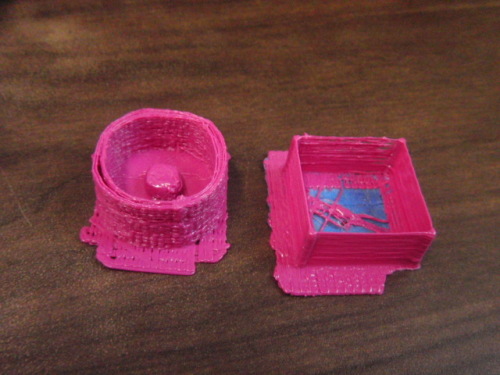
3Dプリンタ、Ultimakerは丸いものが苦手なようです。
Z軸のリミッタの調整と、ラフト(ベース)をつけてから制作するとそれなりに上手くできるようになりました。直径20mm、厚さ2mm、中央に2mmの穴のホイールと、0.5mmの4角い壁を出してみました。円筒形の場合、円を描くようにノズルが動くのですが、歪んで円になってません。中央の穴は潰れています。円筒形でなく中身が詰まった形なら、もうちょっとましかも。壁の方は、1本の樹脂が積層されています。位置精度は良いですが、送り量が足りないのか、4辺の最後の辺が細くてスカスカ。均等に樹脂が送られてないのは、生成されたgcodeによるのではないかと思います。四角はまあまあ、丸いものは苦手なようです。
2012.04.16
コメント(0)
-
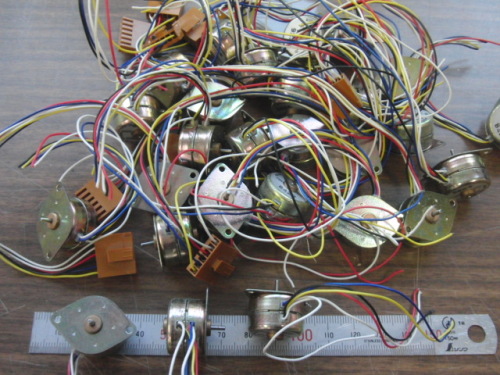
ハーフサイズマイクロマウスに使えそうなステッピングモータを大量にゲット
別の学科の廃棄品の中からパーツを外して、ハーフサイズマイクロマウスに使えそうなステッピングモータを大量にゲットしました。いいでしょ。中古ですが、今度の地区大会の景品に提供しましょうか?
2012.04.12
コメント(0)
-

古い実験機材の再利用、デンコム80Z
Z80は新規に使われることはないと思われるので、昔使ってた機材が大量に廃棄されることに。もったいないので、箱と電源部分のみ切り出して・・・ArduinoとI/O実験用のパーツを箱に入れたら、立派に再利用できそうではありませんか。
2012.04.12
コメント(4)
-

ロボトレーサーのタイヤ作成
ロボトレーサーのタイヤのグリップが良くなるように、タイヤを作ってみました。プラ板とスポンジと塗れるゴムで試作。ミニ四駆のタイヤの代わりに差し込みます。幅も2倍に拡大。デジタル秤で横から押してスリップするまでの力を測りました。元のタイヤが80g程度なのに対して、作ったタイヤは120gくらい。試作で分かったことを考慮してタイヤを2種類作成して、乾燥待ちです。グリップが良くなるので、スピードもあげられると思います。
2012.04.11
コメント(0)
-
デルタ翼機、R/Cとマイコンによる自動操縦切り替え
ArduinoでR/Cとマイコンによる自動操縦の切り替えをしてみました。R/C信号をpulseIn関数で連続で監視するとサーボがバタつくので、100ms毎に割り込みでR/C信号を監視するようにしたらバタつきはなくなりました。R/Cのレスポンスが0.1秒遅れますが仕方ありません。R/Cの送信機側のスイッチを切ると自動操縦(今は安定化した水平飛行)に切り替わります。R/Cによる操縦より、自動操縦優先でパラメータを決めました。その動画→デルタ翼機、R/Cとマイコンによる自動操縦切り替え
2012.04.09
コメント(0)
-

ボタン制御ロボ
カタログと、ロボットをいただきました。近いうちに作ってみます↓アーテックさんのリンク↓ 楽しそうなものがいろいろあります。http://www.artec-kk.co.jp/パソコンなしで、プログラムが学べる!基板のボタンで入力するだけで、ロボットが操れる!【全品ポイント10倍】アーテック ボタン制御ロボ[電子部品取付済] [093564]【10倍ポイント4/6 10:00 ~4/09 09:59迄】【10P4Apr12】【smtb-k】
2012.04.06
コメント(0)
-
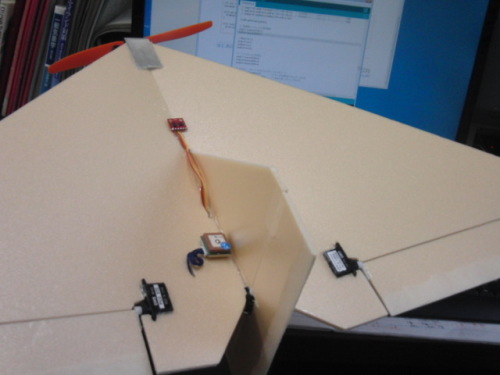
デルタ翼機のIMUによる安定化
6軸IMU(3軸加速度と3軸ジャイロセンサ)による安定化をさせるために、デルタ翼機に組み込んでみました。(自律飛行のためGPSも搭載しています)裏から見たところ↓傾けたり揺らしたりして、動作確認したら制御はかかっているようです。その動画ー> デルタ翼機、IMUによる安定化のテスト次に、手投げで滑空させてみました。翼面荷重が大きいので伸びませんが、まっすぐ滑空してくれました。その動画ー> デルタ翼機、IMUで安定化して滑空テスト受信機の4chの信号をマイコンで取り込もうとすると負荷がかかりすぎて(パルス幅計測待ち?)サーボがばたつく現象があり、ラジコン操縦はまだやってません。解決策探し中の参考URL↓http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1254958909http://diydrones.com/profiles/blog/show?id=705844%3ABlogPost%3A38393&commentId=705844%3AComment%3A38978など。
2012.04.05
コメント(0)
-
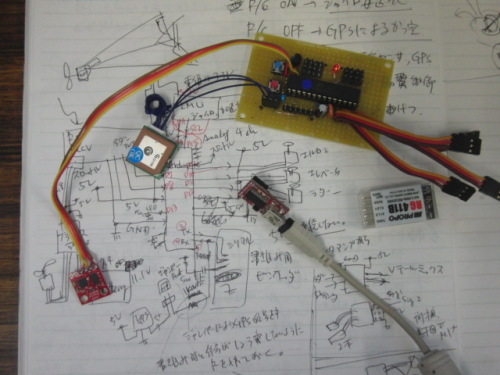
デルタ翼機の自律飛行の基板
デルタ翼機の自律飛行の基板を作りました。ラジコンの受信機の信号をいったんマイコンを通してサーボに伝えます。R/C時も6軸IMUのジャイロを使って安定化、自律飛行時にはGPSの位置情報によって制御できるようにするつもり。裏面はこんな感じ、部品配置を考えながら作ったので、わりとすっきりした配線でできました。こんな感じでソフトウェア開発。
2012.04.04
コメント(0)
-

ProcessingででかんたんAndroidプログラミング
ブックマーク。【送料無料選択可!】ProcessingでかんたんAndroidプログラミング (単行本・ムック) / 田原淳一郎/著
2012.04.04
コメント(0)
-

いただきモノ、その2
レアモノです。 第1回マイクロマウス九州地区大会、参加賞の盾。これも超レア。1981年製、ヒューレット・パッカード(HP)のエンコーダ付きモーターが4つも。当時の価格はいくらしたんだろう?オムロンのエンコーダ。これも多分同年代物。骨董的価値のありそうな、双葉電子工業株式会社のレートジャイロ。16000円×2個。モーターが中で回っているもよう。もったいなくて使えません。両軸モータ。ステッピングモータのような形状だけど、2端子で電圧をかけてみたら結構なトルクで回りました。なんという種類のモータなんだろう?初めてみた。
2012.04.03
コメント(0)
-
6軸センサ(3軸加速度センサとジャイロセンサ)の実験用に、飛行機製作
計6軸センサ(3軸加速度センサと3軸ジャイロセンサ)が一緒になった、シックス・ディグリーズ・オブ・フリーダムというのを入手しました。ArduinoでI2Cで読み取り中↓参考URL:http://bildr.org/2012/03/stable-orientation-digital-imu-6dof-arduino/これを使った何か、ということで制御が分かりやすそうな飛行機を急きょ製作。せっかくなので別の用途で使い回しがきくように、立つように作りました。まず、飛ぶかどうかだけ試したら飛びました。ただし、重量(重量192g)に比べて小さいので速いです。板貼りつけて作っただけなので操縦が難しいです。モータやめて、まずはグライダーとして制御してみようかな…-追記-その動画を追加しました→ 即席デルタ翼機初飛行(強風中)
2012.04.02
コメント(0)
全20件 (20件中 1-20件目)
1
-
-

- iPad
- イチオシ BETTDOW Magic Keyboard 2…
- (2025-10-02 04:19:46)
-
-
-

- 楽天ブログいろいろ
- 【祝・100記事】3ヶ月で毎日投稿を達…
- (2025-11-24 22:09:06)
-
-
-

- 携帯電話のこと
- 【衝撃】楽天モバイルで月1000円未満…
- (2025-11-10 08:00:05)
-



