

2012年12月の記事
全20件 (20件中 1-20件目)
1
-
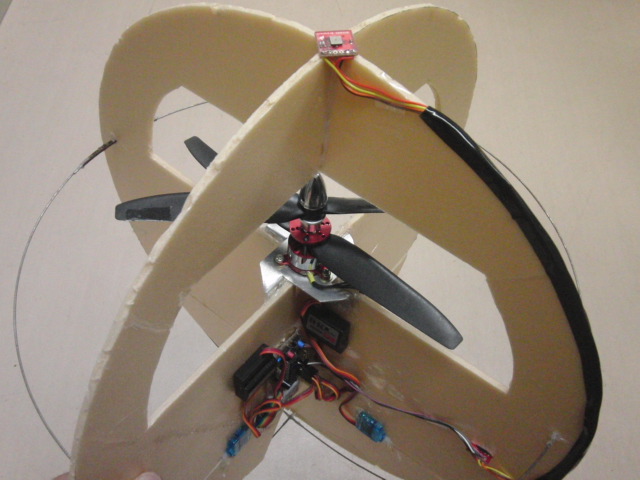
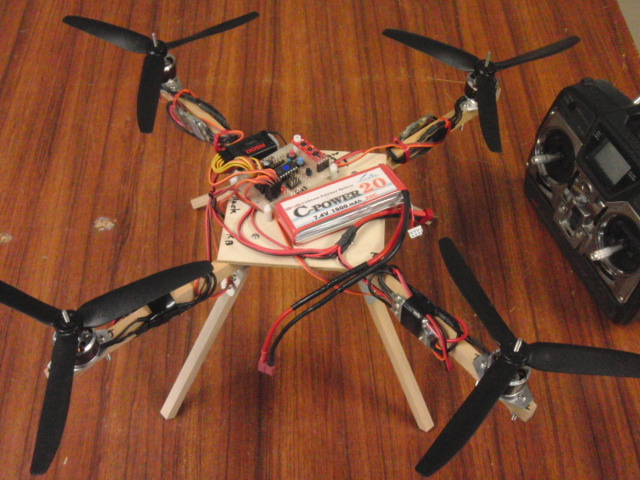
2重反転の飛行体の自律化のために気圧センサをつけた
どこにつけてもプロペラの風の影響がありそうだけど,乱流が一番少なそうなトップにつけてみた.とりあえずこれでデータとってみる.ピタガンとビニールテープで固定してるだけなので,どこにでも付け替えられる.あと,機体の方向はソフトで安定化させようとしてたけど,不確定要素をなくすため市販ジャイロを2個追加した.明日から正月明けまでの持ち帰り仕事でプログラムを作るつもり.
2012.12.21
コメント(0)
-

例のモーター
ある界隈で噂の例のモーターを買ってみました.ギヤダウンユニットと一緒にプロペラも.軸径1.5mmで丁度いいサイズです.回してみたらパワーも十分です.
2012.12.21
コメント(0)
-
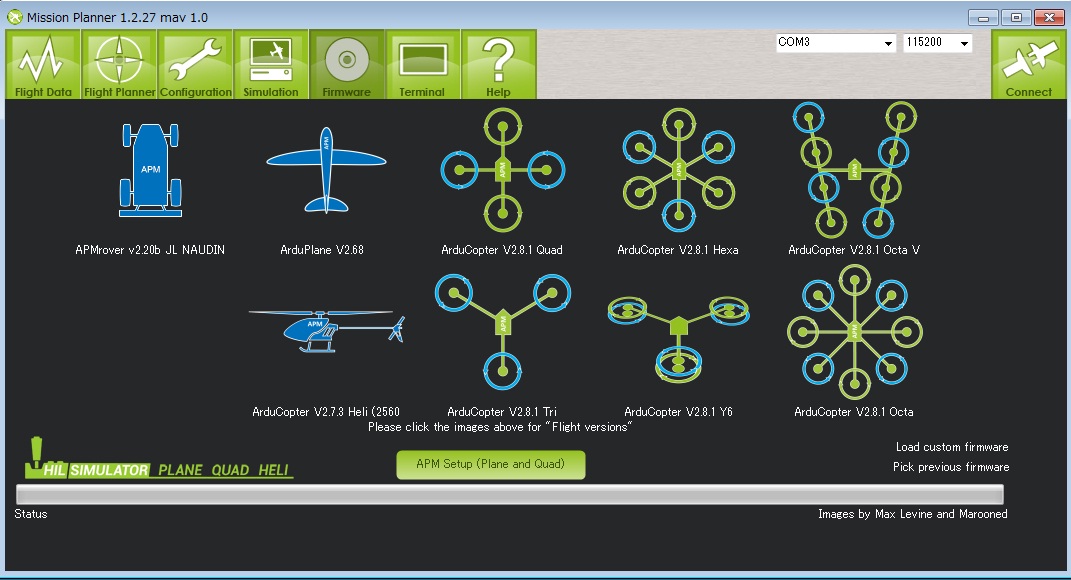
これインストールしてみた・・・
Mission Plannerをインストールしてみました.ボードも買ってみました.でもまだ完全自作は諦めたわけではありません.まだ敗けを認めません.もうちょっとで安定します,きっと...ボードはこちらから↓http://www.japandrones.com/
2012.12.20
コメント(0)
-
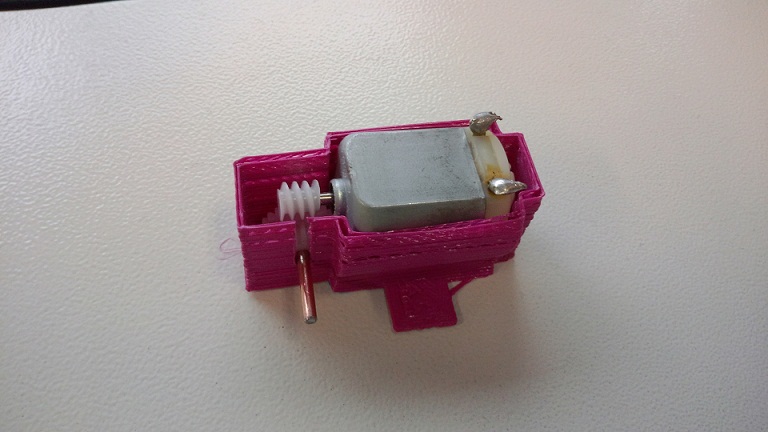
3Dプリンタでギヤボックス作成中.
学生のOくんが頑張ってます.130モーターがすぽっと入るウォームギヤボックス.あとちょっとな感じ.
2012.12.19
コメント(0)
-
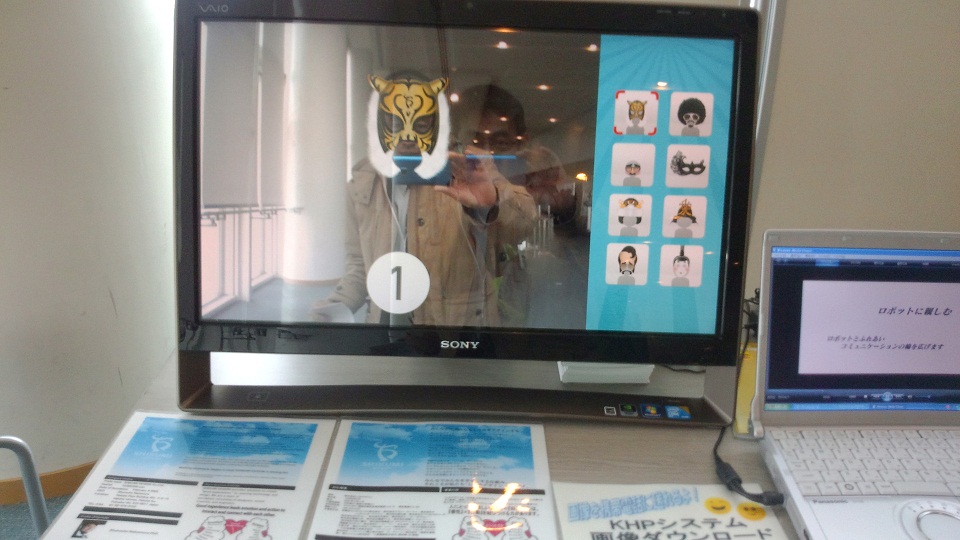
SI2012に行ってきました
福岡で開催されたSI2012に行って発表してきました.趣味系の知り合いにも会いました.企業出展を見るのが好きなので,2時間以上かけてじっくり話を伺ってきました.実物を見て詳しい人に話を聞くのは勉強になります.その中の一つ↓ 顔認識してタイガーマスクをかぶせてくれるものです.
2012.12.19
コメント(0)
-
クワッドコプターにも足つけた
トライコプターに簡単に足が付いたので,クワッドコプターにもつけてみた.4本足はちゃんと長さと角度調整しないとガタガタになるのでちょっとだけ手間がかかった.といっても製作時間は20分(1本5分).
2012.12.14
コメント(0)
-

トライコプターに足つけた.
ちょっと浮いたのともっと浮かせたのでは調整が違うので,持ち上げようと思って足つけた.ちょちょいっと端切れを加工.こんな感じで裏面にネジ止め.いい具合に足が付きました.軽くクッションもあって良い感じ.
2012.12.13
コメント(0)
-

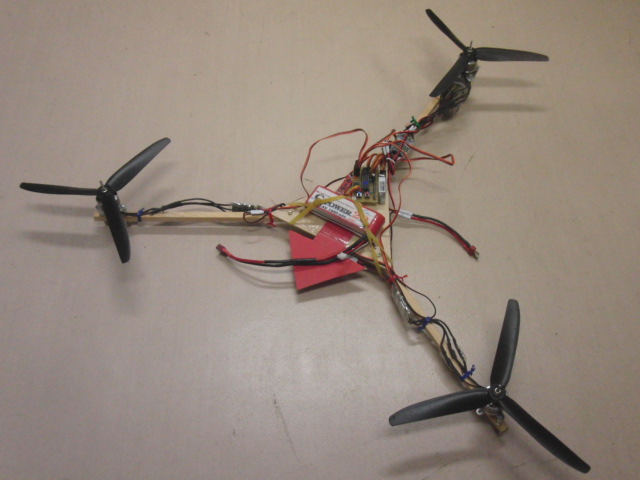
トライコプター自作中,アホな失敗
制御係数のゲインを上げると安定せず,素直な挙動をしないし,ある程度制御が効いた状態まで調整してから飛ばそうとしても飛ばない理由の一つが分かりました.プロペラの一つが机にかかって地面効果が出てたのが原因の一つ.こんな状況で調整しようとしていたからです↓ アホゥでございますね.--追記--だんだん安定して来て,5センチくらいなら浮いて漂えるようになってきた.ただし更に浮かすと制御が弱くてだめ.5センチと1mでは制御係数が違う.5センチでは地面効果のためレスポンスが強い.使っているGWS製の軽い3枚ペラだと振動が少ないので以前QuadCopterを作ってた時に問題だった加速度センサの誤差が少ない.ちょっとスムージングしただけで使える値が取れる.プログラムを整理して,ジャイロによる速い角度変化に対するPD制御.加速度センサで水平になる方向への補正.送信機の指示をモータパワーにミキシング.スロットルの急な操作による墜落を防ぐため,加速度センサで検知して補正.までを入れたら,ちょっとずつ安定になりました.あとはサンプリング速度,制御ループの速度,パラメータの調整で飛んで欲しいところ.
2012.12.13
コメント(0)
-
トライコプター進捗,突発的な暴走の原因は・・・・
モーターを回してると突発的にモーターが暴走して,危険な状態に.だんだんとその頻度が上がって,しかもモーターの回転数が高いほど頻度が高い.制御係数をいじっても止まらず,制御係数0でもだめ.もしやと思って試してみたら原因が分かりました.ボリュームで比例係数を調整できるようにしていたのですが,振動でボリュームの値がふらついていたのです.半田不良か,接触不良か,ボリューム内部の接点の問題か?いずれにせよ,スロットルオフの時にボリュームの設定値を読み取り,モーターが回っている時は一定の制御係数を使うようにしたら暴走はなくなりました.これで結構時間を食ったのですが,原因が分かってよかったです.ずいぶん安定してきましたが,まだ手放しでは飛ばせない状況.初飛行はあと2-3日後.
2012.12.12
コメント(0)
-
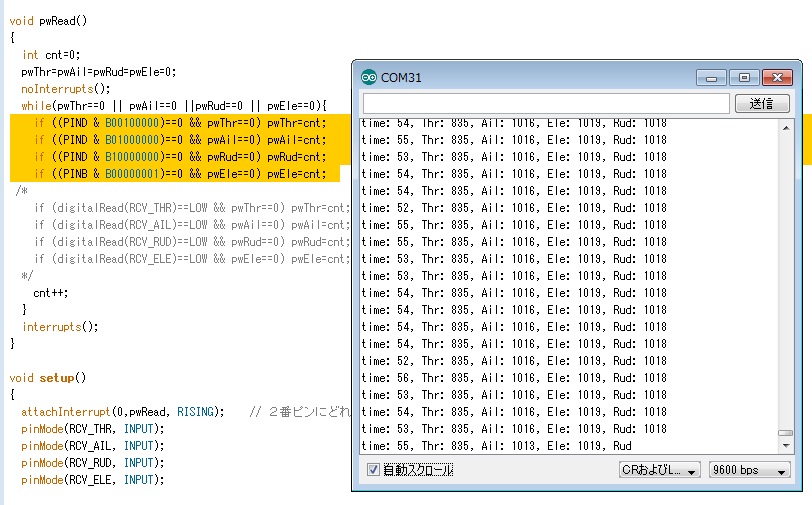
Arduinoでラジコンの受信機から多チャンネル信号読み取ってサーボ動かす,その2
前のエントリーはこちら.2.4GHz受信機のパルスの頭が揃ってることを利用して割込みを使って,割込みを利用してパルス幅を読み取る方法を前に書いたのですが,分解能が足りませんでした.そこで,digitalRead()を使うのではなく,ポートを直接アクセスしてオーバーヘッドを無くして分解能をあげられないか試してみました.その様子はこちら↓これだけ見ると,マイクロ秒オーダーのループでカウンタが回って,分解能前より一桁上がったように見えますが,そう簡単には行きませんでした.ループ内の条件判断がクリアされるとループを回る処理時間が変わり,あるチャンネルの操作量を変えると別のチャンネルにも影響してしまい(10-20%くらい?)無視できないほどでした.ループが約1-2マイクロ秒で変わっているようなので,次のスケッチのように8マイクロ秒のディレイを入れました.これで1ループが約10マイクロ秒となりループの時間の誤差が少なくなります.サーボのパルス幅の1-2msを読み取るのに約10マイクロ秒のループが100回程度になるので,分解能も1/100程度になり,サーボの読み取りとしては実用レベルになりました.読み取り部分のスケッチはこちら↓ 割込みの設定とかはしてください.//setup内 attachInterrupt(0,pwRead, RISING); // 2番ピンに受信信号を入れる pinMode(RCV_THR, INPUT); // 受信機スロットル信号監視用 pinMode(RCV_AIL, INPUT); // 受信機エルロン信号監視用 pinMode(RCV_ELE, INPUT); // 受信機エレベータ信号監視用 pinMode(RCV_RUD, INPUT); // 受信機ラダー信号監視用// RC受信void pwRead(){ int cnt=0; cntRd++; if (cntRd
2012.12.11
コメント(0)
-
トライコプターのコントローラ自作中
GWSのコントローラが何にも悪い子としてないのに燃えてしまいました.これを機会に,以前作ったトライコプターのコントローラを自作してみることにしました.以前は,ラジコン用のジャイロを4つ使って安定化して飛ばしたのですが,今度はマイコンと9軸センサ(9DOF)を使って自律安定性を高めてR/C制御する形に変えたいと思います.その様子↓コントローラ部分拡大.アナログ入力ピンに4つのボリュームを搭載して制御係数を可変できます↓ちゃんと飛ぶかなぁ...?それから,全部自作してみるのは楽しいけど結構大変なので,こちらのサイトのグループに参加させて頂くことにしました.(直接知ってる人は一人しかいませんが)Japan ArduCopter Group
2012.12.10
コメント(0)
-

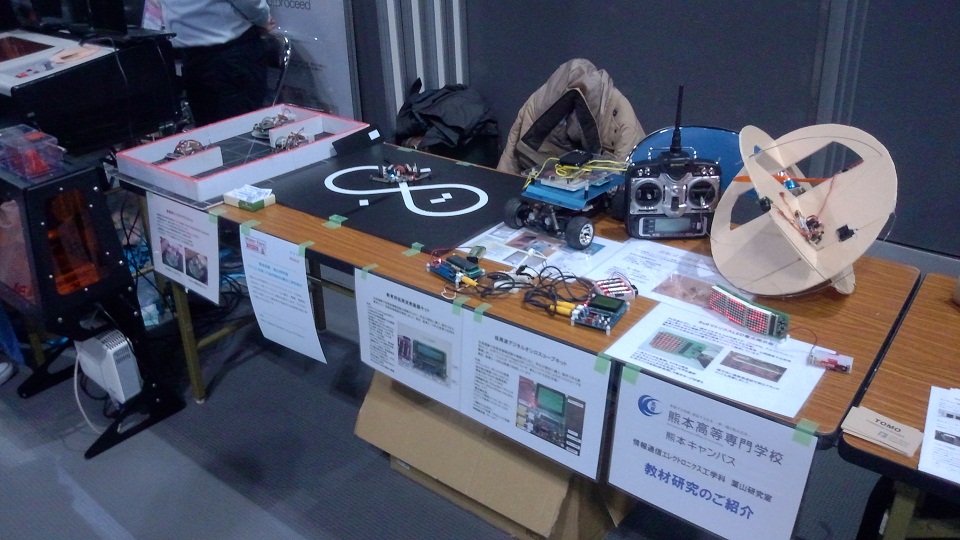
今日はオープンキャンパス
今日はオープンキャンパスで,研究室の学生に出展と説明をしてもらいました.机の上にLED掲示板や教材の発振器やオシロ,GPSロボカーなど置いています.上からゴムで吊るして2重反転の自作飛行体の展示.手前にマウスの迷路,左手にトレーサー用のコースを置いています.マウスは5回のオートスタートを作っておいて正解でした.このサイズの迷路なら無難に走ってくれるので展示するには良いです.トレーサーの方は人の出入りが激しく,コース上にすぐに埃が乗るので,頻繁にタイヤの掃除をしないと走ってくれませんでした.コースアウトしないように囲って,机の上に置いてコンパネ1枚程度のコースで走らせたほうが良かったようです.
2012.12.08
コメント(0)
-
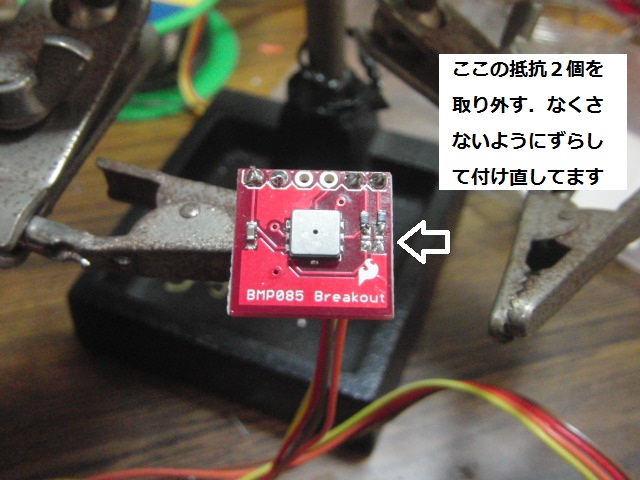
やっぱり気圧センサBMP085を使うことにして・・・
昨日紹介したスイッチサイエンスさんの気圧センサBMP085はI2C通信の2端子がの4.7kΩの抵抗でプルアップされてます.他のI2C通信のセンサも並列につないで使う場合は抵抗を外さないといけません.この製品は2種類あって新しい方はハンダを取れば簡単にプルアップ抵抗を外せるんですが持ってるのは古いほうなので小細工しました.抵抗を一旦外して,なくさないように横にずらして付けました↓
2012.12.07
コメント(0)
-
秋月の大気圧(絶対圧)センサー
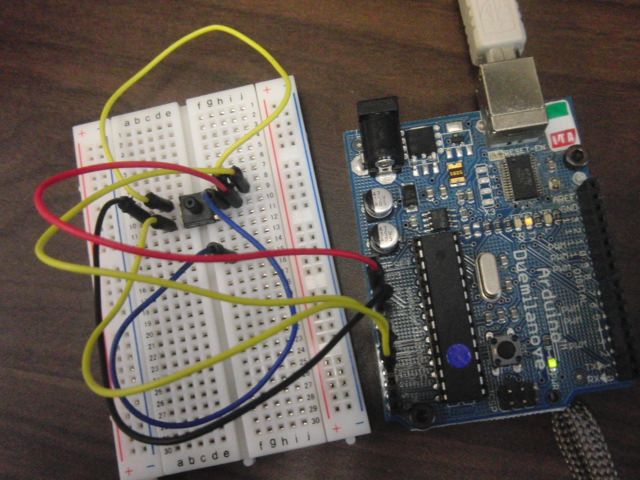
昨日とは違う気圧センサの実験.秋月さんで購入した大気圧(絶対圧)センサーをArduinoで使ってみました.配線は,2番ピンにGND5番ピンの5V3番ピンにA0(アナログ入力ポート)1と6番ピンを接続してA1(アナログ入力ポート)A0とA1の差分の信号をとれば気圧に関係した出力がでます.ただし,1気圧変わって100mVくらいの出力なので,感度はかなり低いです.台風が来ないと変化がわからないくらい?リファレンス電圧を小さくして変化を大きく取るか,1と6番ピンの間にボリュームをいれてオフセット調整して,アンプを入れた方がいいです.参考までにスケッチはスケッチの例を元に改変して作りました,const int analogInPin0 = A0; const int analogInPin1 = A1; int sensorValue = 0; void setup() { Serial.begin(9600); }void loop() {sensorValue = analogRead(analogInPin1)-analogRead(analogInPin0); Serial.println(sensorValue); delay(2); }
2012.12.07
コメント(0)
-
来季のマウスの計画
トレーサは今年の機体をベースにソフトをいろいろ試して新作を作る気でいるけど,マウスの方はソフトがまだまだなのでソフトの改良をコツコツ続けようと思っていたのですが,ソフトだけでは入賞など到底挑めないのでハードの改造もしようと思ってます.機体を作った4年前からの構想ですが,ご老体にムチ打って5年目にしてようやく完全体?になれるかな.
2012.12.06
コメント(0)
-

オリエンタルモータ ステッピングモータ学習キットのお試し
オリエンタルモータさんからステッピングモータ学習キットが届きました.わかば編と基礎編があります.早速マニュアルをひと通り読んでみました.丁寧に説明されていて体験的に学んでいくことができす.わかば編↓基礎編↓基礎編にはステッピングモータコントローラも含まれており,簡単に回せて,励磁方式の設定などもできます.モータと電源を接続したところ↓その動画→ オリエンタルモータ ステッピングモータ学習キットのお試し小型のステッピングモータ(28mm角,PK223PA)をブレッドボードを使って接続して回してみました.高回転まで回って良いモータです.その動画→ オリエンタルモータの学習キットで別のモータを回してみた マウスで斜め走行するには幅がギリギリなので,これでトレーサを作るってみようかなぁ.
2012.12.06
コメント(0)
-
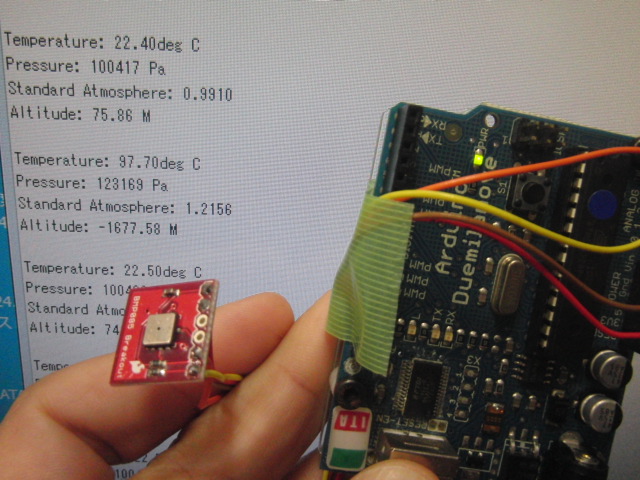
スイッチサイエンスの気圧センサBMP085を使ってみた.
飛行体の高度をGPSで制御しようとしてもレスポンスが悪くて安定しない.良いGPSだとレスポンスはいいけど重くなる.気圧センサーを使うと良いという話を聞いたので気圧センサの予備実験をした.センサはこちら↓http://www.switch-science.com/products/detail.php?product_id=1070Sparkfunのページに行くと説明がいろいろあって,チュートリアルはこちらにあります↓http://bildr.org/2011/06/bmp085-arduino/Arduinoのスケッチを入れて動かすとこんな感じで1秒おきに温度,圧力,高度などを出力してくれます↓もうちょっと早いレスポンスで変化を見たかったので,スケッチをちょっと書きなおし,高度のデータのみを100ms毎に出力するようにして,Processingでグラフ化してみました.変化を見やすいようにちょっとスムージングもしてます.途中の波線は,1.5mほどその場でセンサを上下させてみたもの.感度も悪くはありません.飛行体に載せる場合は風の影響も考えないといけないので,近くでプロペラがブンブン回っているところで使える値を出してくれるかは,実験してみないと分かりません.
2012.12.05
コメント(2)
-
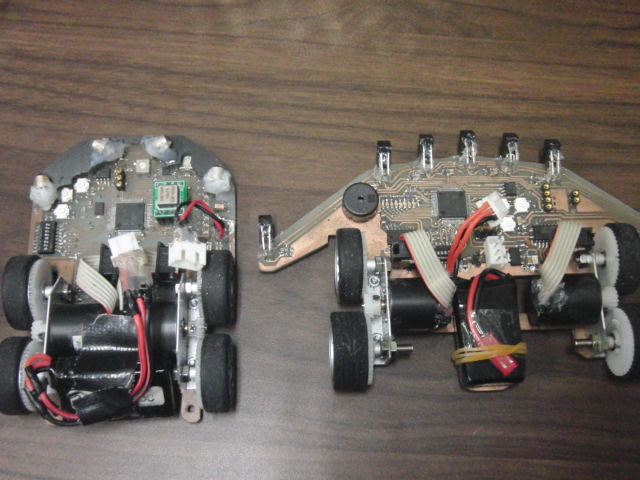
ベステクのジャイロの代用品
マウスで数年前によく使われたベストテクノロジーのジャイロモジュールは,生産終了でもう入手できません.5V電源で使いやすかったので,慣れた部品構成で急ごしらえで作った今回のロボトレーサーにも載せ替えて使ったのですが・・・先日のMake Faire Tokyo 2012では載せ替えながらデモをしていて,何度も抜き差ししてるといつか壊しそうで不安でした.今度の週末は学校のオープンキャンパス,マウスとトレーサをデモで出そうと思っているのですが極力ダメージを減らしたいので,ジャイロの代用品を作りました.使ったのは,スイッチサイエンスさんのLPY5150AL搭載ジャイロモジュール.これも生産終了品なのですが手元に数個あったので利用しました.電源電圧は3.3Vなので降圧が必要.出力電圧変化の極性は逆のようですが,ソフトで対応可だと思います.裏面はこんな感じ.3端子レギュレータで降圧して,間に挟んだ基板で配線をしています.1g位重くなりましたがしょうがないです.というわけで,仲良く記念撮影.両方同時に動かせるようになりました.でもあくまで代替措置.本気モードの時は載せ替えます.
2012.12.05
コメント(0)
-
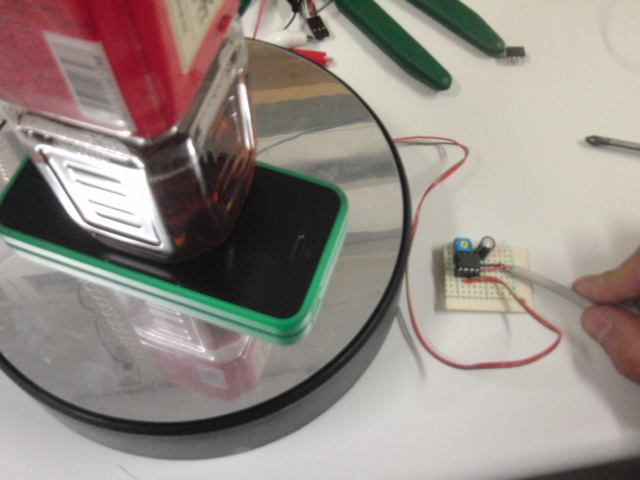
簡単な電子工作でターンテーブル(展示台)の速度調整
電池駆動でくるくる回るターンテーブルがあります.フィギュアとかプラモデルとか置いて楽しむそうです.研究室の学生が買ってきたんだけど回転数が早すぎるので遅くしたい,USB駆動にしたい,というのでPICマイコンを使ってボリュームで速度をコントロールできるようにしたら?とアドバイスしました.こんな感じで,工作してました↓基板拡大.USBケーブルをばらして,電源のみを使用.PICマイコンのポートからの電流20mAくらいでモーターが回ったそうで,FETもなしの直結でモータを回しています.重たい物を乗せても大丈夫でした.ボリュームの値をアナログで読み取って,PWMでモーターへのパワーを調整しています.その動画→ 簡単な電子工作でターンテーブル(展示台)の速度調整【26%オフ!】 WAVEWAVE TT-041 ターンテーブル(ベーシックブラック)(X3057)
2012.12.04
コメント(0)
-
Make Faire Tokyo 2012 で出展してきました.
こんな感じで出展させて頂きました.お隣でお煎餅の焼ける匂いがしてました.トレーサーを激しく走らせたら喜んでくれた人が多かったです。一人で行ったので昼食とか他のところを見に行ったりとかで1.5時間くらい自分の展示を放置してました.居ない時に来てくださった方ごめんなさい.知り合いとかネット上で知り合った人とか学校の卒業生とか来てくださいました.それから、最近でたCPU自作入門の本を書いた方もいらっしゃいましてお話できました.良い本だと思いますので買ってくださいね↓【送料無料】CPU自作入門 [ 水頭一壽 ]
2012.12.03
コメント(0)
全20件 (20件中 1-20件目)
1
-
-

- 新製品発売情報・予約情報
- 喜怒哀楽by増田貴久
- (2025-02-14 15:21:13)
-
-
-
- しんくぱっど
- 【続】X1 Carbonの電源ボタンが機能…
- (2025-10-19 19:42:00)
-
-
-

- 大好き!デジカメ!
- 10年以上昔のコンデジに復活の日を
- (2025-11-12 07:20:04)
-



