

2008年06月の記事
全25件 (25件中 1-25件目)
1
-
スラローム走行の考え方
もうちょっとプログラムを進めました.スラロームの考え方は,片方の車輪のみに加減速を入れるだけで大方できそうで,区画に合わせて細かい調整をいれればよさそうです.ためしに,左右独立に加減速を入れて走らせてみました.スラロームの調整動画
2008.06.30
コメント(0)
-
マイクロマウス,フリーページにまとめました.
ハーフサイズ(1/2)マイクロマウスの製作について,フリーページにまとめました.マイクロマウスエフテック社のキット製作前のあれこれテスト用迷路の製作回路試作ハーフサイズマウスの製作モータ駆動テストセンサを使った走行左手法,拡張左手法最短走行競技に向けて最短走行までのプログラムで,冗長な部分を削除して短くまとめました.ハードの設計図,回路図はスケッチしか描かずに作ったので,後日描いて追記します.競技としては,やっとスタート位置に立てるかどうか,というところですが,教材としては,ここまでを丁寧に解説すれば価値はあると思いますので,教材作成作業をぼちぼちやっていきます.---追記---いろいろテストしていたら,プログラムに一部不具合があるようです.原因が分かったら修正します.---追記その2---競技に向けてを追記しました.
2008.06.30
コメント(1)
-
ハーフサイズマウス,最短走行
週末に作ったプログラムのバグをとって,最短走行まで完成しました.テスト用の小規模迷路で最短走行をさせるには,最短距離を求める関数run_saitan()内で,ゴール地点のうちの一つの座標を小規模迷路に合わせて与えてやればよいです.この場合,smap[3][2]=1; としてます.(スタート地点を[0][0]とすると,ゴール地点はyに3つ,Xに2つ進んで[3][2])最短走行の動画(途中でお尻が接触して迷路がズレたので直してます. DIP-SWで最短走行プログラムを呼び出して再スタート)最短走行プログラムまで.KNCT-HM1_0628.c20年のブランク(というより20年前に一度作っただけ)を乗り越え,ハーフサイズマウス製作から基本的なプログラム完成まで1ヶ月弱.自分で言うのもなんですが,頑張りました.マイクロマウスのルール変更でハーフサイズになっても,ステップモータを使ってとりあえず走るだけのマウスを作るのならば難易度が極端に上がるわけでもないのかな,というのがここまで作った感想です.(基板おこさなくても,ユニバーサル基板で普通に半田付けしてできますし.)
2008.06.30
コメント(0)
-
マウスなしでプログラム組んでます.
週末なので,家でマウスなしでプログラム組んでいます.最短経路の計算と,最短走行のプログラムが形の上ではできましたが,マウスに乗せてみないとバグがあるかどうかわかりません.あと,求心法まで作ったら,プログラムの冗長な部分を修正してまとめて公開しようかと思ってます.動作未確認の最短走行プログラムまで.KNCT-HM1_0628.c-----なお,プログラムを公開してますが,自分のバックアップ代わりと,特に興味がある方がいらっしゃったらどうぞご覧ください,ということです.追加した部分だけでなく,細かい修正は思いつく度に入れてます.あとオリジナリティの問題ですが,他の方が公開されているプログラムやキットのサンプルプログラムなど,前にいくつか読んで考え方は学びましたが,学校の教材として後でまとめるため,自分のプログラムを書いている間は他のプログラムは一切参照せず,自分が一番分かりやすい考え方でプログラムを作成しています.
2008.06.28
コメント(2)
-
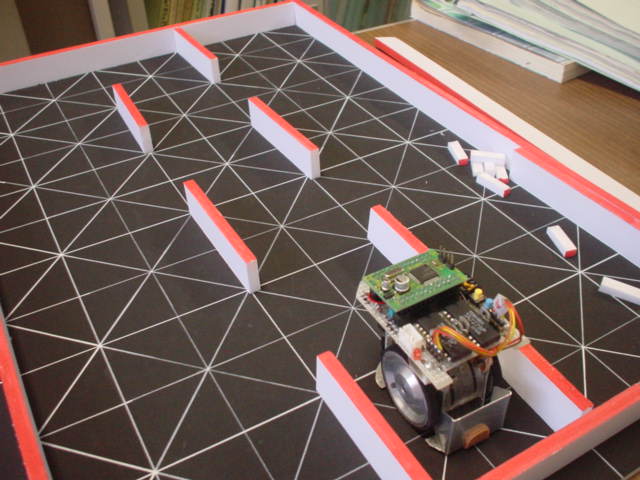
ハーフサイズマイクロマウス,拡張左手法,マップ作成あり.
ハーフサイズマウスのプログラムの続き,マップ作成有りのいわゆる拡張左手法を作りました.走行動画を見ると分かりますが,ぐるっと1周したあと,未探索部分を探索し,スタート位置に帰って停止します.拡張左手法の動画はこちら.ここまでのプログラム.KNCT-HM1_0627.cさて,次はいよいよ最短走行!
2008.06.27
コメント(0)
-
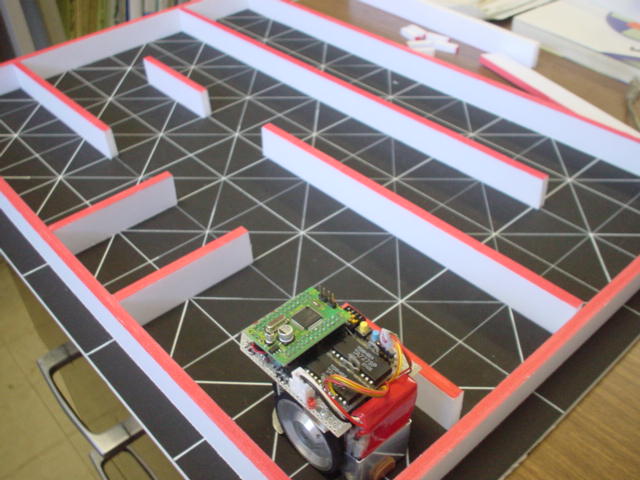
ハーフサイズマウス,左手法,マップ作成なし.
ハーフサイズマウスのプログラムの続き,左手法を作りました.マップ作成はまだです.一区画ごとに止まって左手法で走らせるのなら,左手法のプログラムと走行プログラムを別に作れるので簡単ですが,区画ごとに止まらずに直線は高速のまま走らせるようにプログラムしました.その分,判断が入り組んでます.加減速,旋回を繰り返すと誤差が大きくなってしまい,壁にぶつかってしまいます.もう少し細かな位置制御が必要なようです.調整途中の動画,途中で壁にぶつかります.少し調整を加えて,直線の多い迷路にしてみた動画.ここまでのプログラム.KNCT-HM1_0626.c
2008.06.26
コメント(2)
-
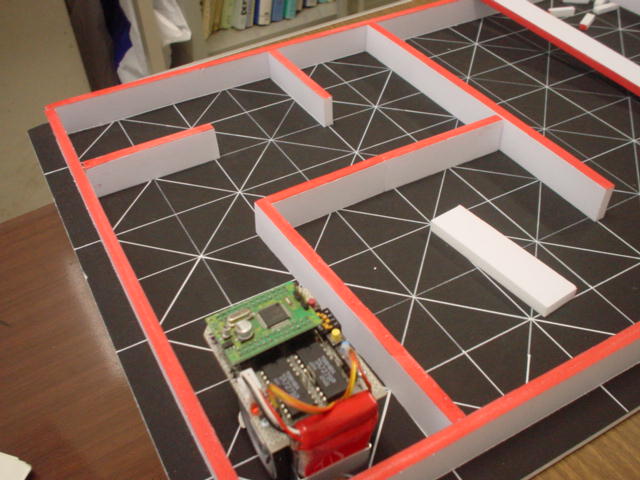
ハーフサイズマウスの左右壁を用いた位置補正,往復走行,周回走行
ハーフサイズマウスのプログラムの続きです.左右壁を用いた位置補正ができるようになりました.ですので,往復走行も,もっと賢くなりました.左右のセンサを使った距離補正による往復走行の動画壁が途切れている時でも対応できます!の動画周回走行の動画壁が途切れているときの周回走行の動画ここまでのプログラム.KNCT-HM1_0625.c
2008.06.25
コメント(0)
-
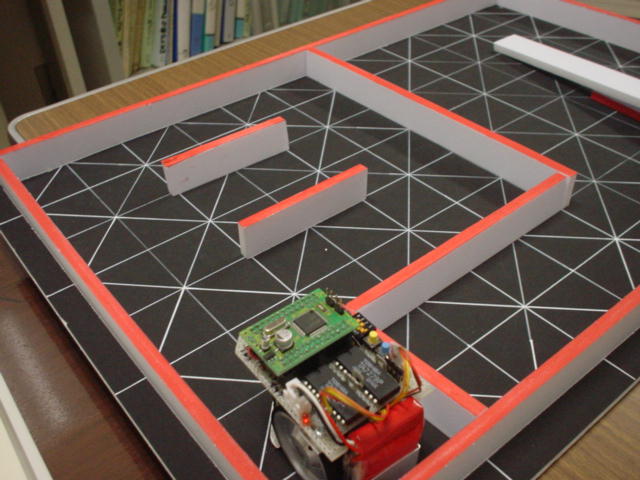
ハーフサイズマウス,センサを使った走行
センサを使った走行です.前壁のみ検知し,壁が見つかるまで加速前進.壁が見つかったら減速して標準の距離まで進み,壁との角度を補正した後,Uターン,これを繰り返しています.ほおっておけば,誤差が重なって横壁にぶつかるまでかなり長い間往復してくれます.携帯動画はこちら.MPEG動画はこちら.それから,悩んでたバグの原因,リセットを押してもメモリクリアされないと思い込んでいた,単純な間違いでした.その前はC文法の勘違いや,オーバーフローやビット操作の取り扱い方の間違いでした.Cの勉強をやり直しながら進んでいます.今日までのプログラム(KNCT-HM1_0624.c).--追記--youtubeにアカウントを作って動画を貼り付けてみました,が,rakutenにはうまく張り込めないようです.http://jp.youtube.com/watch?v=9zKKKChiHs0
2008.06.24
コメント(2)
-
光センサ動作しました.
やっと光センサの動作確認できました.回路的には間違ってなく,プログラムだけで解決しました.しかし,プログラムを週末にかなり書き足したのでその際バグが発生し,正常に動いたところまで動かなくなってしまいました...
2008.06.23
コメント(0)
-

ロボットの目をつくる―二足歩行ロボットにカメラをつけて画像処理
今日のブックマーク.ロボットの目をつくる
2008.06.22
コメント(0)
-
今日は子守をサボってプログラム作成
今日は子守をサボってプログラム作成してました.本体は持ち帰ると子供に壊されそうなので,本体なしでやってます.学生のころから忘れっぽいので,プログラムを書き出したら,自分で何をどう書いたか忘れないうちに書きすすめないと...(Cの文法も含めて)まだまだ先は長いですが,思い通りに動き出すと(既に頭の中で走り始めてます)楽しいものです.それから,マイクロマウスの製作がだいぶ進んだので,左のフリーページにまとめました.
2008.06.21
コメント(2)
-
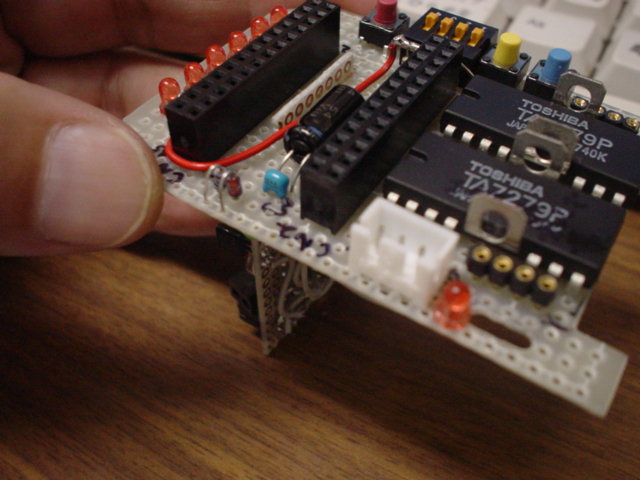
ツェナーダイオードを使った電圧モニタ回路
さっき書き込んだばかりですが,電圧モニタ回路を作りました.6.2Vのツェナーダイオードと1kΩ抵抗(写真に写ってる親指横に縦に並んだ2つ)とLED(電源コネクタ横)が直列に接続され,電源に並列に接続されています.LEDは定格電流で2V近くのドロップがあるので,電源が約8VでLEDが暗めに点灯します.電圧が落ちるとスーッと暗くなり7Vでは完全に消灯します.急ごしらえの割には,LiPoの定格近くでLEDの明るさが面白いように変わって良い感じです.
2008.06.20
コメント(0)
-
LiPo電池ダメにしたかも?
LiPo電池つないであれこれやってました.結構もつなぁと思いながら使ってたら急に反応がなくなりました.すぐに気づけば良かったのですが,おかしいと思ってあれこれやったのが間違い.電圧がドロップしてマイコンが止まって,モータ回路が変な動作をしたのかもしれません.7.4V定格のLiPo電池の電圧を測ってみると約3V.LiPo用の充電器では電圧が低すぎると出て,充電してくれません...なので,ちょっと電池を休ませたあと,直流安定化電源直結で充電し,電圧を回復.その後,充電器に接続したら充電を始めました.でももう十分な容量は出ないかもしれません.それと,マウスには電圧モニタ用の回路を付けることにします.--追記--バッテリーが正常充電できました.マウスにつないだら正常に動きました.
2008.06.20
コメント(0)
-

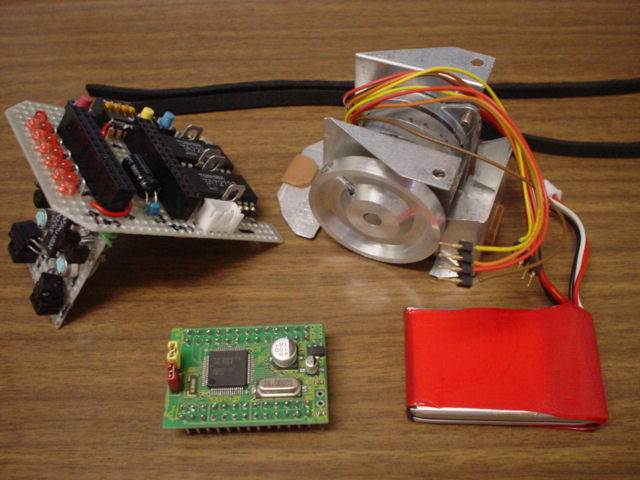
JPEGカメラとZigBeeモジュール
前に書いた,JPEGカメラモジュール C328-7640ZigBeeモジュール:BTX025 ZIG-100Bを2個ずつ買いました.左がZigBee,右がJPEGカメラ↓なんとなく,並べてみたら・・・↓マイクロマウスができたら,次はこっちで遊んでみます.
2008.06.20
コメント(0)
-
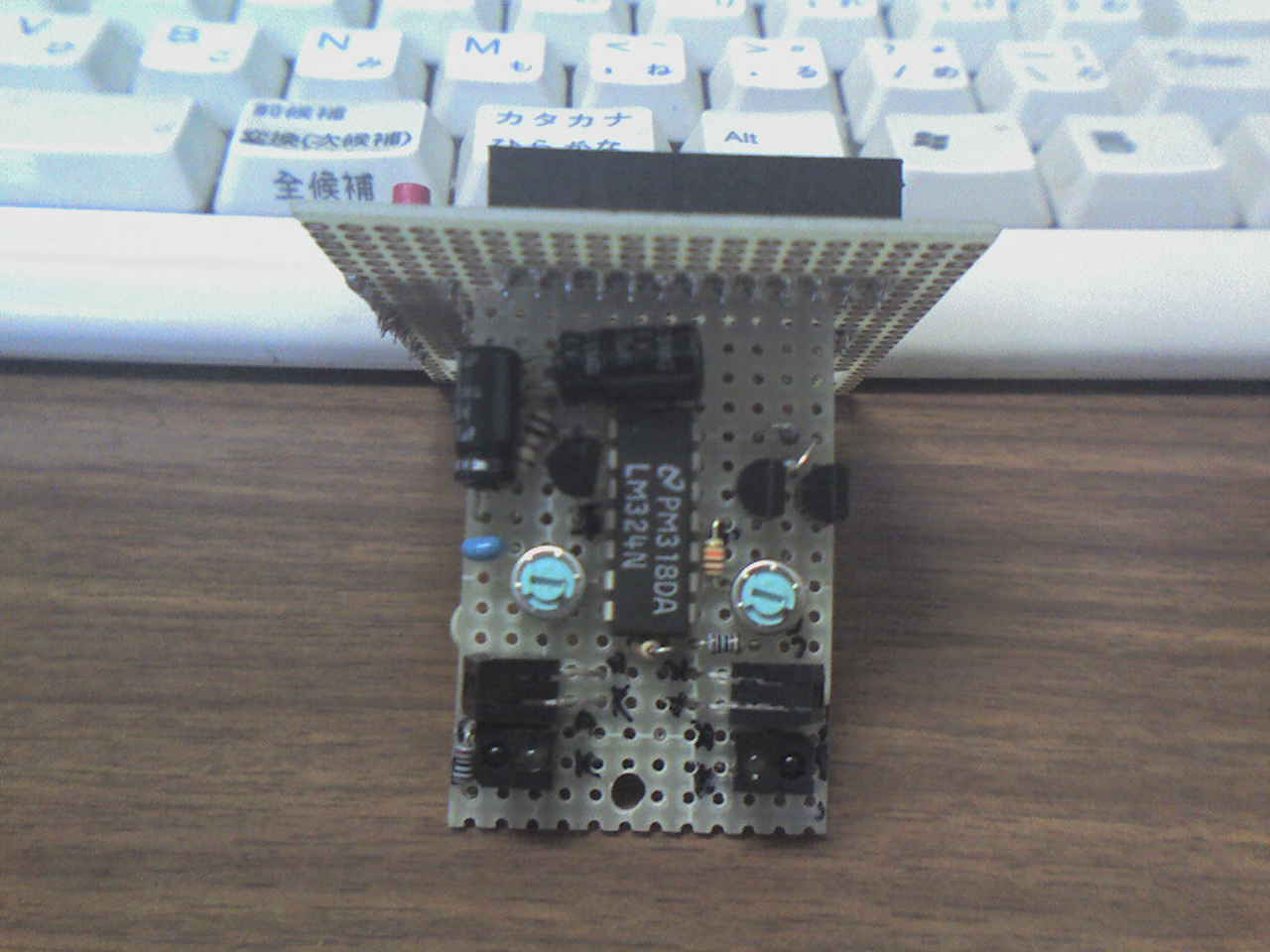
赤外LED点灯してない?
今日は時間が取れたので,(といっても他の仕事を後回し)センサのチェックまでやりました.しかし・・・前二つ左右のセンサの出力はADで取り込めるのですが,肝心の赤外LEDが働いてないようです.タイミングがあわないのか,点灯自体してないのか不明.明日,回路からチェックするつもりです.センサの動作確認までできれば,あとはプログラムを作るだけなのですが・・・--追記--プログラムを変更したら,センサが動き出しました.一部不具合がありますが時間をかければ原因を見つけられそうです.要は,LED点灯からADコンバータ駆動まで時間を十分に取っていなかったことが原因でした.
2008.06.19
コメント(0)
-
ハーフサイズマウスのモータの加減速,その場旋回
プログラムでステッピングモータの加速・減速,その場旋回をさせてみました.迷路の中で動かすとそれっぽいです.とりあえず足回りはちゃんと動いたので,次はセンサ関係の動作確認をします.動画はこちら.MPEG動画はこちら.
2008.06.19
コメント(0)
-
モータ駆動回路のテスト
とりあえず,モータを回してみました.timerAを使って,その場くるくる.ゆっくり前進.--追記--早く前進.加減速してないので,手で押してます.1相励磁でテストしてますので2相励磁にすればもうちょっとスピードアップできるかも.バッテリー容量との兼ね合いですが.
2008.06.17
コメント(2)
-
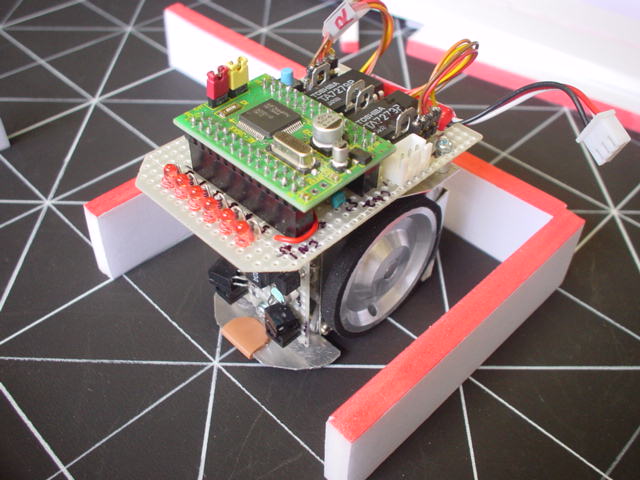
ハーフサイズマウス ハードウェア完成
ハーフサイズマウスのハードウェアが一応完成しました.(一応というのは,ちょっと不安材料があるから)迷路に置いたところ.ぎりぎり斜め幅に収まってます.足回りの幅は43mm,長さ69mm(5mm短縮可)高さは突起部のぞいてH8の基板面まで65mm.重量197gです.
2008.06.17
コメント(0)
-
ハーフサイズマイクロマウス途中経過
ハーフサイズマイクロマウスの途中経過です.半田付けがおおよそ終わりました.あとは仕上げと,回路をチェックして,タイヤを張って基板のネジ止めを位置を調整して本体は完成.こんな感じ.裏返したらスパゲッティー.組上げるとこんな感じ.正面から見たところ,幅は44mmくらい,高さは突起部のぞいて65mmくらい.重心が高いので,走りは悪そう.それから,やっとデジカメ復活しました.古いデジカメ(CyberShot P3)ですが,安価な互換バッテリーでもうしばらく使います.
2008.06.13
コメント(0)
-
半田付け中
ハーフサイズマイクロマウスの半田付け中.ユニバーサル基板にきちきちで部品を並べて裏で配線を作ってるのでまさにスパゲッティー状態です.間違えたら,見つけるのに苦労しそう.途中経過(センサ部分)↓
2008.06.10
コメント(0)
-
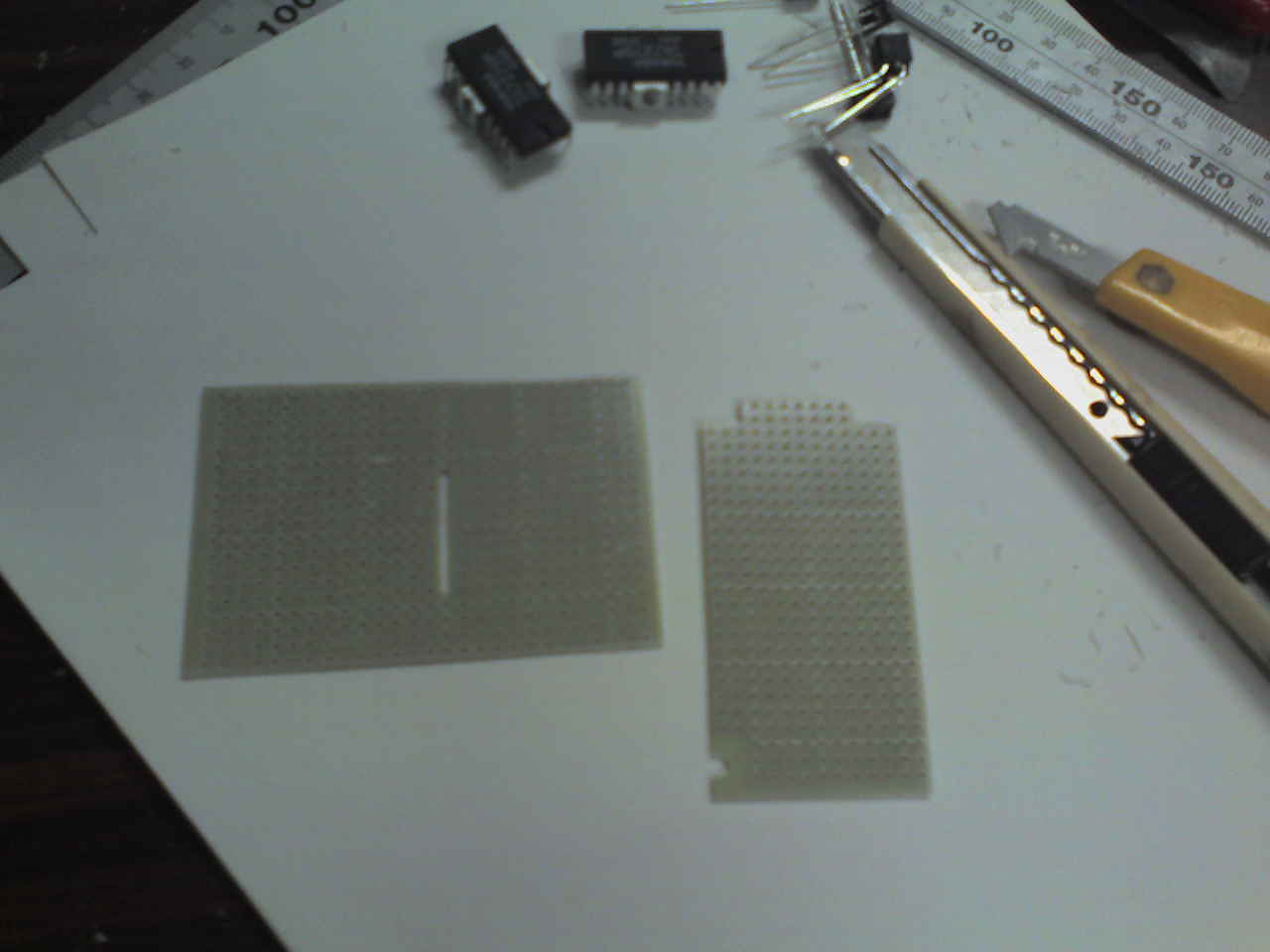
ハーフサイズマイクロマウスのT形基板
基板加工中です.瞬間接着剤とキャタライザーで一発接着.出来上がりはこんなイメージのT形基板です.これに部品が全部乗るかなぁ・・・?
2008.06.06
コメント(0)
-
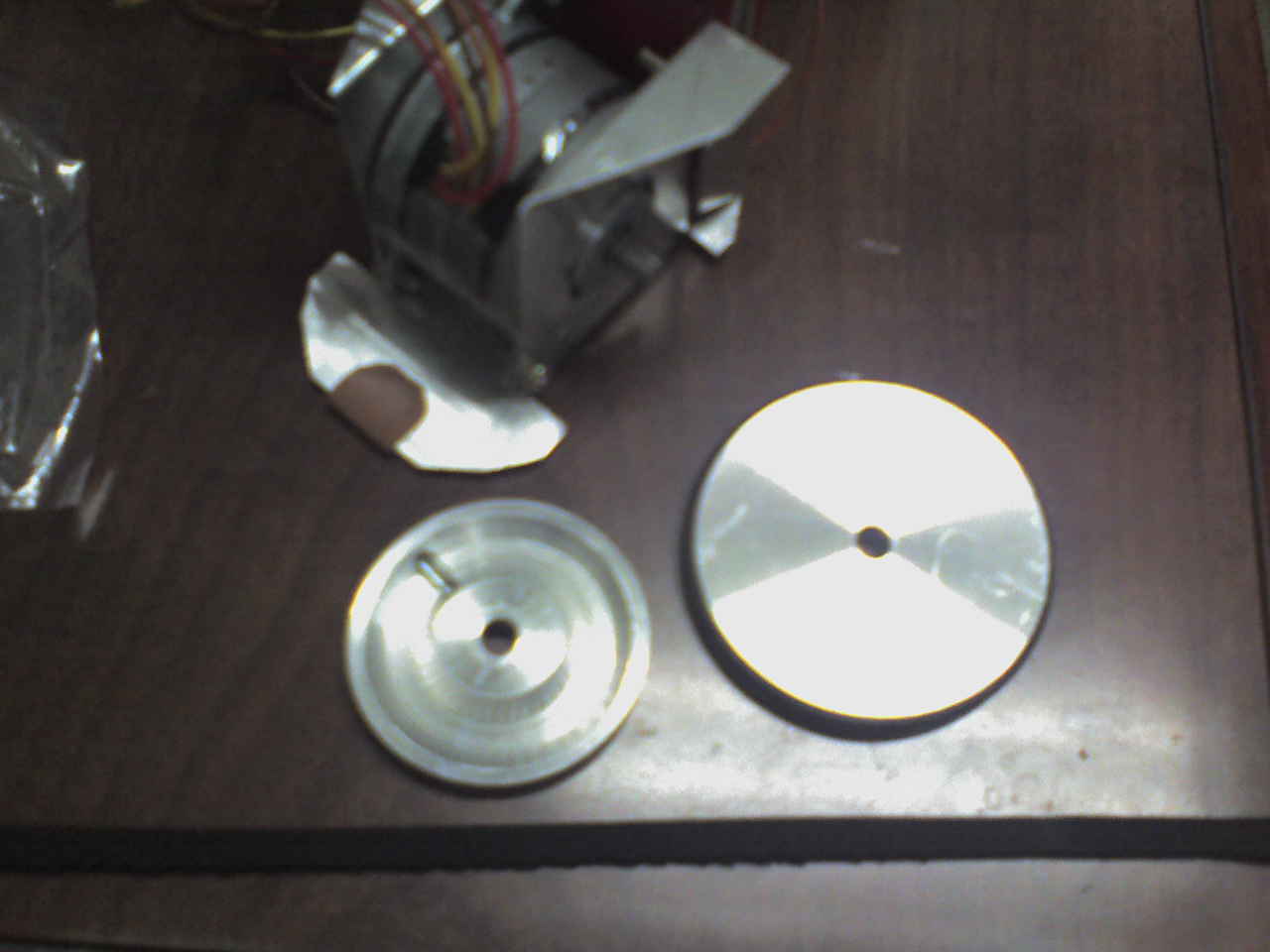
1/2サイズ マイクロマウス のタイヤホイールの加工ができました.
加工前後.ミニ旋盤に慣れて力加減が分かってきたので,のホイールは割と早く削り終わりました.ホイールの下には1mm弱の隙間があります.ここに2.5mmのスポンジゴムを貼る予定です.
2008.06.05
コメント(0)
-

今日はホイールを削りました.
ツクモロボット王国で買ったホイールを削りました.このホイールは削って直径を合わせるにはいいです.OリングタイヤホイールセットM30314/1Sまず,棒にM5のメネジを切って治具をつくり,タイヤをネジで固定して,カリカリ削りました.
2008.06.04
コメント(2)
-
夕方からちょっと,ハーフサイズ(1/2)マウスの製作
有って無いような設計図,というかスケッチ.旋盤とかいろいろ買いましたが,結局のところ現物合わせで適当に工作.金切りバサミとニブラが活躍しました.ステッピングモータの軸も長いのでマジックで適当に印をつけてギコギコ.やっと1個切れました.こんな感じで組合わせます.タイヤをつけると適当に空けた穴も隠れます.下が浮いてますが,タイヤは旋盤で径を小さくして,肉厚を薄くする予定.迷路に置いてみると,いい感じでしょ.ステップモータにタイヤを直結するなら機械的な加工はほとんどいらないし,小さい分,強度も必要なさそうなので,こんな感じでハーフ1号機は行きます...
2008.06.03
コメント(1)
-
ハーフサイズマイクロマウス「Pi:Co」いよいよ発売
2009年からスタートするハーフサイズマウス競技に完全対応した小型自律制御マシン.詳細はコチラ↓http://www.rt-biz.jp/product/pico/index.html
2008.06.03
コメント(0)
全25件 (25件中 1-25件目)
1
-
-

- モバイルよもやま
- [ウイルスバスター クラウド]「お…
- (2025-10-31 06:43:08)
-
-
-

- アイフォン・アイポッドの必需品
- スティーブ・ジョブズの死に際に発し…
- (2025-07-14 03:41:24)
-
-
-

- 楽天市場のおすすめ商品
- ✨ 【愛車復活!】魔法の添加剤「FCR…
- (2025-11-26 01:22:08)
-



