

2008年07月の記事
全33件 (33件中 1-33件目)
1
-

今日読み返した本
VB6のシリアル通信のため読み返した本は,自動計測システムのためのVB6入門という本なんですが,楽天で探してみたら下記の本に変わっているようです.自動計測システムのためのVisual Basic 2005入門
2008.07.31
コメント(1)
-
マイクロマウスのタイム自動計測用回路
マイクロマウスのタイム自動計測用回路を考えています.指向性のある赤外線フォトダイオードとフォトトランジスタでは長距離まで検出可能なようですが,調整が難しそうなので,指向性があまりないフォトダイオードを使ってみました.最初は感度調整のボリュームを入れていましたが,固定倍率でもON-OFFだけなら検出できそうです.別に迷路をライトで照らすつもりもないですし.あとは,ON-OFFを昨日作ったシリアル通信でPCに送って,VBでプログラムを組めば,低コストで自動計測ができそうです.問題は,応答速度と時間の確度ですが,相対的に不公平がなければ問題ないのでは,と思っています.たぶん,人がストップウォッチで測るよりはましでしょう.さて,もうひとふんばり.
2008.07.31
コメント(2)
-

C言語によるSH-2マイコンプログラミング入門
今日読んだ本.同じ著者によるH8の本(C言語によるH8マイコンプログラミング入門)は読んだことがあり,同じような手順で説明してあるので,頭にindexを作る程度のななめ読みで.DCモータを制御するには,H8よりSH-2というのは納得です.C言語によるSHー2マイコンプログラミング入門秋月のSH7125Fベースボードキット も注文したので来週あたり入手できますが,仕事がそろそろ山積みになってきたので,いつ使えるかどうか・・・.
2008.07.30
コメント(2)
-
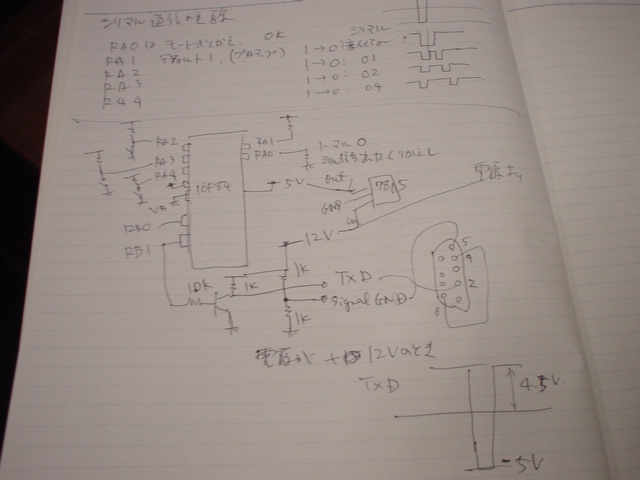
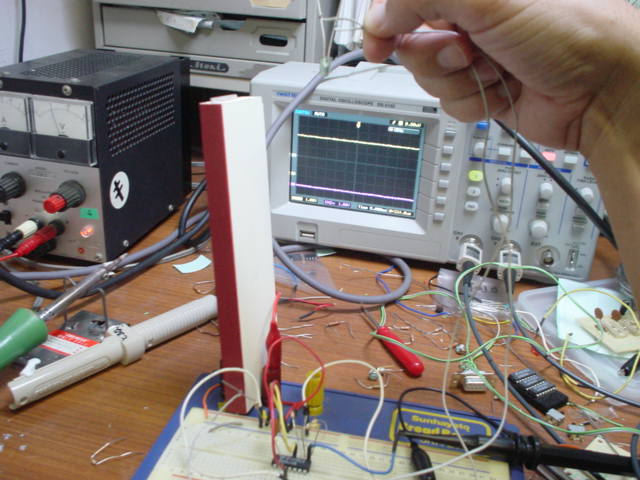
PIC16F84Aでシリアル通信
可能な限り簡単にシリアル通信で外部からPCに信号を取り込みたいと思って,PICを使ったシリアル通信をやってみました.使用したのは,PIC16F84A,USARTは付いてません.なので,シリアル通信のパターンをプログラムで作成して送信します.回路図は,こんな感じ.レベル変換用のMAX232などは使用せず,トランジスタと抵抗分割で,0±約5V(電源電圧に依存)の信号をつくりましたが,PC側がうまく受信してくれました.(なぜなら,手持ちが無かったし安くすませたいから)回路をブレッドボードで作成したところ.信号の波形例PCに接続して,ターミナルアプリを起動します.通信速度は,19200bps,バイナリモードで信号を取り込むと,このように,スイッチのON-OFFで読み込まれるデータが変化しました.プログラムはこの位です.MPLAB上でC言語による開発,コンパイラはPICC-LITEです.マイクロマウス大会の時間計測に使いたいのですが,PCでストップウォッチのプログラムを組んで,シリアルポートからスタート・ストップの信号を取り込むとして,どの位の精度で計測できるのか・・・?やってみないとわからないので,とりあえずやってみます.---追記----すみません.私の勘違いで,上記信号はアイドル状態,スタート・ストップビットが反転してます.ですので,取り込んでいるデータは正確ではありません.とりあえず,作るものを作ってしまってから,書き直します.
2008.07.30
コメント(0)
-
マイクロマウスのことをいろいろ検索してたら,
自分のページを海外のサイトで紹介してました.http://www.micromouseonline.com/blog/自分でも最近忘れてましたが,このサイトはマウスではなくCPUを作る話がメインです.
2008.07.30
コメント(0)
-
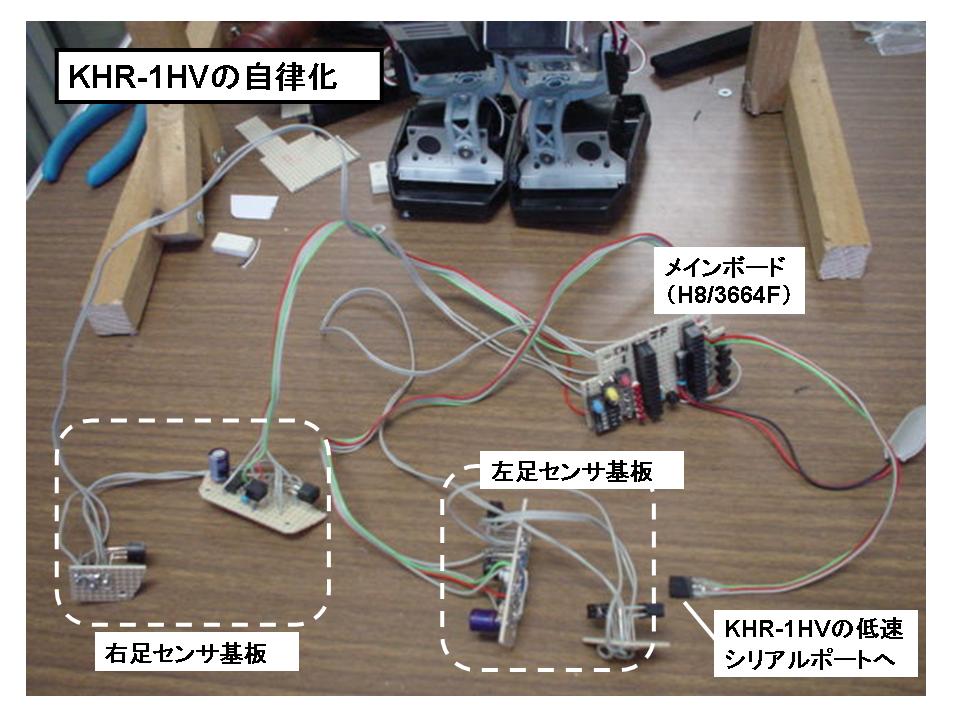
KHR-1HVの自律化,回路完成
最終チェックはまだですが,回路が一応できたのでまとめました.左右の足にセンサを計8個つけました.メイン基板は右脇,左右の足に直接配線を渡すのも不恰好なので,センサを並列化しました.多分大丈夫だろうと思ってテストなしに回路を作りましたが,動かなかったら書き直します.KHR-1HVバッテリーセット
2008.07.29
コメント(0)
-
お金とやる気のあるうちに・・・
工作グッズを注文しました.バンドソー:K-100K-21:ミニデスクドリル
2008.07.28
コメント(3)
-

KHR-1HVの自律化,片足分の回路.
今日は夕方から時間ができたので,片足分の回路を作りました.(ネジ止めはしてません)KHR-1HVバッテリーセット
2008.07.28
コメント(0)
-

エレキジャックNo.7
とりえず、ブックマーク。エレキジャック 2008年 08月号 [雑誌]--追記--今日帰りに地元の本屋に行ったらありました.読者の皆様,お尻を向けてごめんなさい.
2008.07.27
コメント(0)
-

オープンキャンパス
今日は学校のオープンキャンパスで説明の仕事.写真は会場セッティング.私の担当は,半導体デバイス制作室(クリーンルーム)の説明と,半導体デバイス製作実験の紹介.あやしいマネキンが皆様をお迎えします.詳細はこちら→ オープンキャンパス
2008.07.26
コメント(0)
-

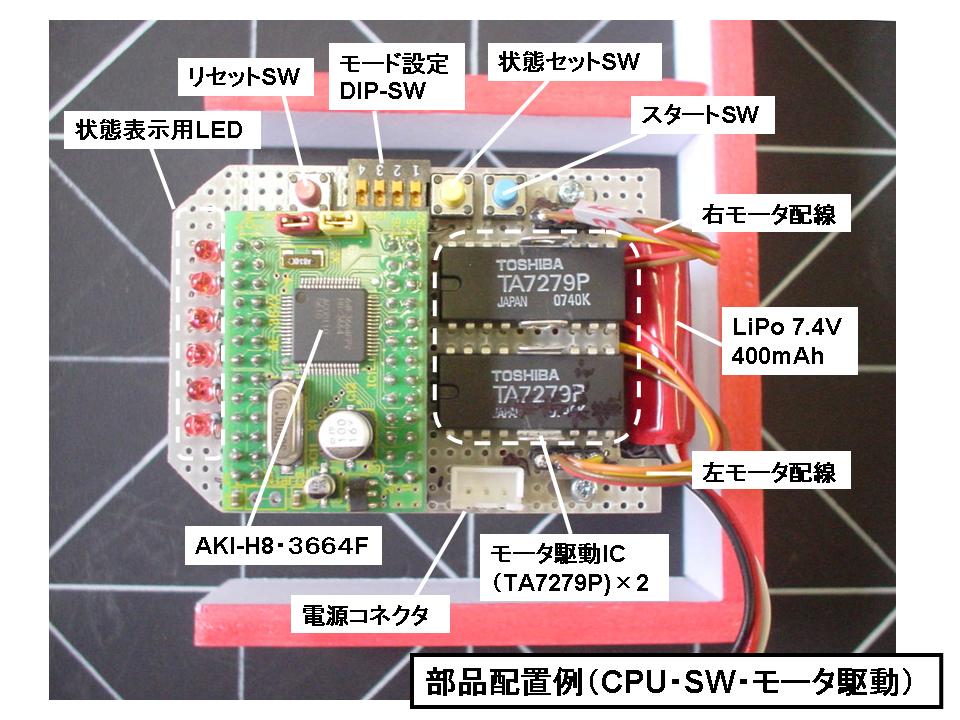
KHR-1HVの自律化,メイン基板が7割くらいできた.
今日の午後,数時間空いたのでそれから今までKHR-1HVの自律化基板の製作をしました.DIP-SWで手ごろな大きさのものが無かったので強引にカット.今日作った基板.メイン基板の回路構成は,モータ駆動回路を省いてハーフサイズマイクロマウスの回路とほとんど同じです.基板の裏面.右脇に仕込みます.固定用の部材も着けました.電池は左脇.マジックテープで取り付けます.あと2-3日時間が取れればハードウェアはできそうです.KHR-1HVコントローラーセット
2008.07.25
コメント(1)
-

KHR-1HVの魚の目治療!?
魚の目の治療ではなく,ネジ穴がちょっと小さいので足裏からドリルで穴を広げてます.こんな感じで部品を配置します.前後左右2個づつで8方向の光センサを取り付ける予定です.KHR-1HVバッテリーセット
2008.07.24
コメント(0)
-

今日の作業
これだけです↓拡大すると↓
2008.07.23
コメント(2)
-

連休は,子守とお勉強.
連休は子守のほかは,トランジスタ技術8月号を読んでました.付録の基板が遊べそうなのでこの号は数冊買いだめしたいです.それから,この本↓読んでました.数学が苦手なもので数式がずらっと並んでいるだけで億劫になりますが,買ったばかりで本棚に並んでいたので,一度ちゃんと読んでおこうと思って.(でも全部は読めませんでした)結局分かったのは,H8マイコンに逆運動学問題をきっちり解かせるのは無理っぽい,ということくらい.ヒューマノイドロボット
2008.07.22
コメント(0)
-
回路図修正しました.
回路図を見直したら間違ってたので修正しました.OPAMPの回路図エディタのデフォルト型番から修正してませんでした.状態表示用のLEDの回路がH,L逆でした.最初流れ込みでLEDを点灯しようと思っていたのですが,基板を半田付けするうちに,手じかにGNDラインがあったためか,逆に作ってました.回路的にはどちらも問題ない(H8から直接駆動する点では問題あり?)ですが,ソフトと矛盾するので修正しました.こちらへ.
2008.07.21
コメント(0)
-
脇が甘い!
KHR-1HVは,脇が甘い!なので,ココ↓と,ココ↓に電池とH8Tinyを仕込んで,動かしてみます.腕を下ろしてもこの通り↓
2008.07.18
コメント(2)
-

次の目標に取り掛かりました.
次は,KHR-1HVをH8を使って自律で動かしてみるつもりです.ちゃんとモーションを作るためには,吊り下げる必要がありそうなので,急ごしらえで(やっぱり適当に)作りました.吊り下げるとこんな感じ.強度も高さも十分.ゴムの長さを変えれば,適当に荷重を与えることもできます.
2008.07.18
コメント(1)
-

100円ショップのハトメ
用があって寄った100円ショップでハトメを見つけました.↓左から,ハトメ玉100円,ポンチ2本で100円,ハトメパンチは200円,計400円0.5mmのアルミ板をコの字に曲げて,ポンチで適当に打ち抜きます.この位の板なら穴が開きますが・・・・穴周辺がたわんでます.金槌で平面に直して,ハトメで固定.簡単にこんなものができました.しかし,アルミ板のエッジが引っかかり,また面と面をこすってるのでスムーズに動きません.なので,ワッシャを入れて見ました.スムーズに動くようになりましたが,ワッシャが厚すぎ.なので,テフロンのシートを切り出して,再固定,手をかければなかなかいい感じにできました.0.5mmの板で支持できる程度のものを使った工作には使えそうです.100円ショップの200円ハトメパンチも馬鹿にはできませんね.
2008.07.18
コメント(0)
-
エレキジャックの目次
目次がWebにアップされてます.なぜそんなことを取り立ててここに私が書いてしまうのかを知りたい方がもしいらっしゃいましたら,下記URLをご覧ください.http://www.eleki-jack.com/news/pdf/Elc07_005_contents.pdf2008年4月18日の書き込みから始まった一連の仕事?の成果?です.こっぱずかしいですが,それなりにがんばったので・・・
2008.07.17
コメント(2)
-
本体の図面・・・
Windows95用のAutoCAD LT(2次元)なら持ってた(使ってない)のですが,今のOS用のフリーの製図用CADを探してみました.Jw_cad (http://www.jwcad.net/)いうのをダウンロードして使ってみましたが建築用らしく,自分には不要な機能が多すぎてピンときませんでした.もう一つ,鍋CADというのが見つかりまして,これは機械系製図用には良さそうです.(http://www.nabetech.com/index.html から道具箱へ)ただ,左と右クリックと数値入力をうまく使い分けないといけなくて,慣れが必要です.頑張ってハーフサイズマウスの本体図面を書いてみましたが,ある程度書いて保存するとき間違ってデータを消してしまいました.途中で試しに出力して残ってた画像をアップしておきますのでご容赦ください.こちらのページの最後→ハーフサイズマイクロマウスの全回路
2008.07.17
コメント(3)
-
回路解説を加えました.
こんな感じで回路解説を加えました↓詳しくはこちら→ハーフサイズマイクロマウスの全回路
2008.07.16
コメント(2)
-
ハーフサイズマイクロマウスの回路
ハーフサイズマイクロマウスの全回路図を下記のフリーページにのせました.ハーフサイズに収めるために回路を必要最低限に簡略化しています.センサは並列,モータは直結です.いつ壊れるか分かりません・・・ハーフサイズマイクロマウスの全回路--追記--回路の場所を移しました.
2008.07.15
コメント(0)
-

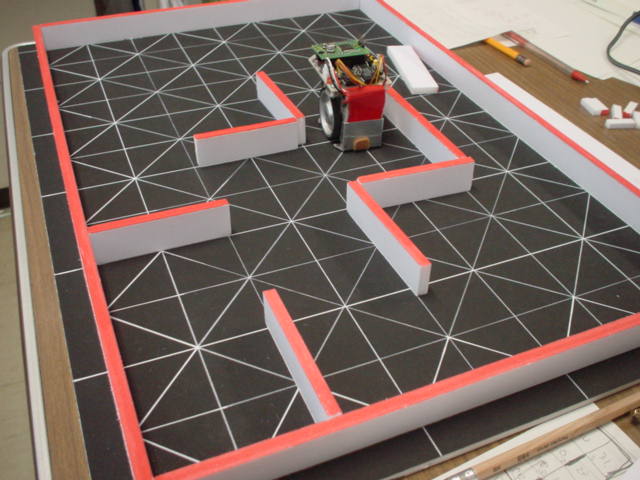
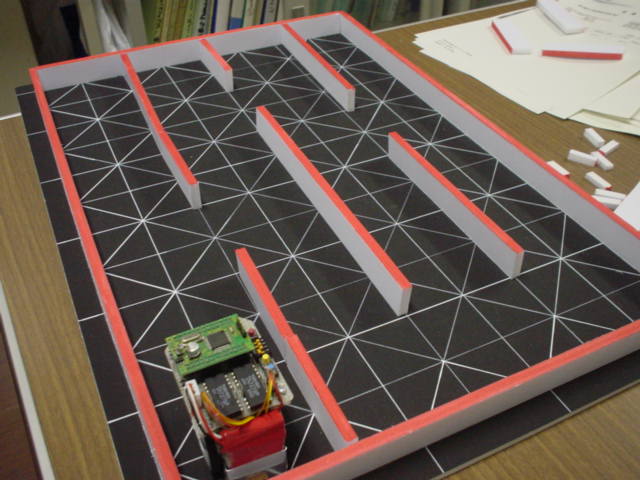
ハーフサイズマウスはノーマルサイズ迷路を走る?
ハーフサイズマイクロマウスでノーマルサイズの大会に出られるかの実験です.以前ブレッドボードで実験したときには,検出距離はぎりぎりとれそうだったので,マウスに実装した段階でセンサのテストをしてみました.ノーマルサイズの迷路に置いたハーフサイズマウス↓マウスを手で動かしながら,センサの値をLEDに表示させています.前壁の検知の動画 横壁の検知の動画 横壁との距離変化を動画で撮影 ハーフサイズの場合は半区画前で前壁の検出をしていましたが,ノーマルサイズの迷路では,もう少し近づいたところで前壁を検知する必要がありそうです.左右は,多分問題ないでしょう.
2008.07.15
コメント(0)
-
ミニ四駆改造ノルマ
授業中,何か勉強に関係ある工作ネタない?と学生に聞いて話をしてたら,ミニ四駆を夏休み中に何通りか改造して見せることになってしまいました...
2008.07.13
コメント(0)
-
ロボットクリエーター
テレビの情熱大陸でロボットクリエーターの高橋なんとかさんが出ています.設計図を書かずにロボットを作っているそうで,そこだけは自分と同じですね.文系の大学から京都大学工学部に入りなおしたそうで,どうやら頭の出来も考え方も自分とはだいぶ違うようです.とはいえ,自分は自分のペースで,ロボット作りに励みます.
2008.07.13
コメント(1)
-
電子工作ノート
プライベートな話ですが・・・仕事の記録をちゃんとつけようと思って平成17年度業務日誌,というのを作ったのですが,まったく書かずに終わり,とりあえず雑多な記録でも,と思って雑ノートに書き換えたけど,これも尻切れトンボ.そこで,電子工作ノートNo1にして2008年1月から電子工作の記録をつけ始めました.PICやH8やマイクロマウスに関して勉強したことをいろいろ書いていたら,約半年で1冊終わりました.記念に写真をのせておきます.表紙↓マイクロマウスのスラローム走行・斜め走行を考えてるページ↓
2008.07.10
コメント(2)
-
ハーフサイズマウスの公開版プログラムの修正
フリーページに公開したプログラム例で,最短経路の計算に不具合があったので修正しました.
2008.07.09
コメント(0)
-
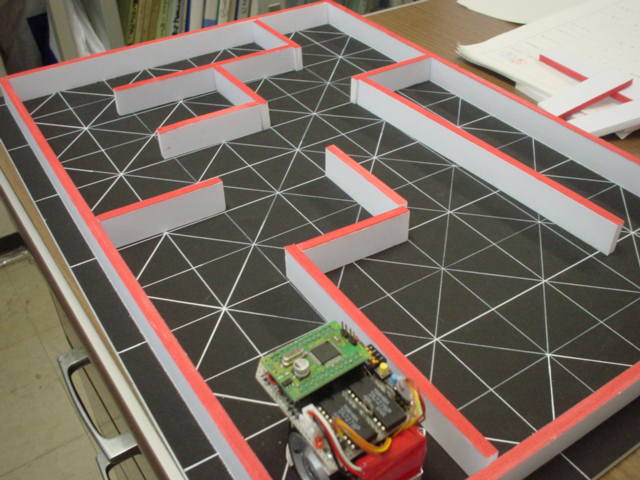
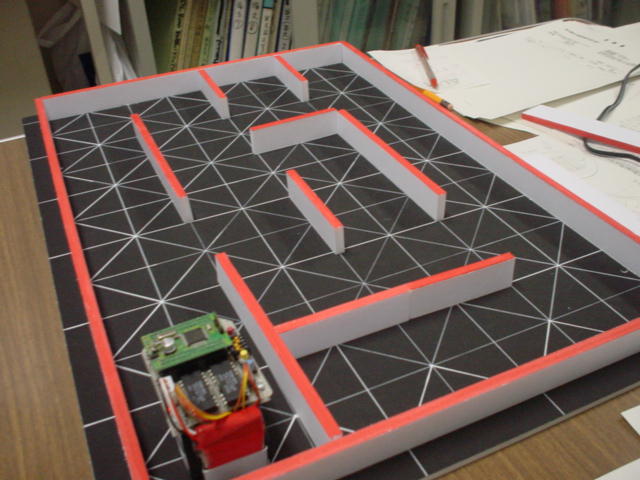
ハーフサイズマイクロマウス,足立法できました.
ハーフサイズマイクロマウスで足立法による迷路探索プログラムまできました.写真のような迷路なら,ゴール(対角地点)に向かって探索し,スタートまで帰ってきます.探索後,斜め走行を含む最短走行をさせてみた動画がこちら.最短走行は,スラロームなし,あり,斜め走行あり,の3通り作ってあります.あとは大会までに,走行時の細かな姿勢制御を作り込めばよさそうです.ちなみにプログラムは1000行ちょっと,21kBほど.基本的には前に公開したプログラムに追加修正して作りました.
2008.07.09
コメント(0)
-

次の次の次の目標は,
ハーフサイズマウスもだんだん形になってきたので,次の次の次の目標は,リアルタイムOSを使えるようになること.Webをめぐってて良いページを見つけたのでブックマーク.1時間でわかる組込みリアルタイムOSトロンプロジェクトのトップページはこちら. この本も読みましたが,分かりやすいです↓図解μITRONによる組込みシステム入門ちなみに,次と次の次の目標は...やっぱり秘密.
2008.07.08
コメント(0)
-
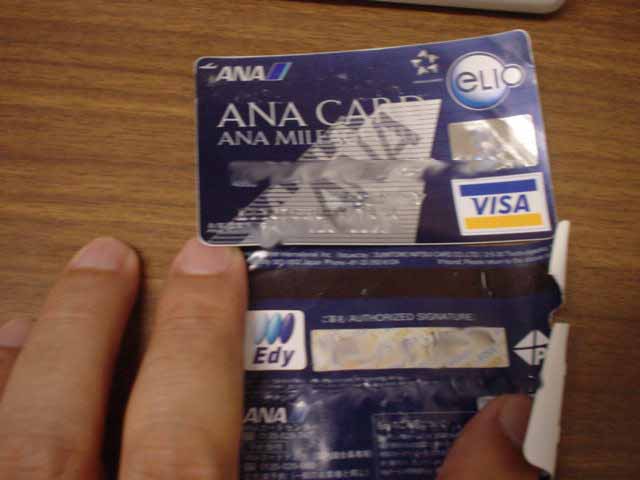
Edyカードの仕組み?
久々の分解ネタです.期限が切れたEdy機能付きのクレジットカード.Edyの残高を0にして,分解してみました.はがしてみるとこんな感じです.ただのループコイルではなく,意図的なパターンが切ってあります.でも意味不明.チップ周辺にはストレスをかけないように剥がしたつもりですが,読めませんでした・・・
2008.07.07
コメント(2)
-
ハーフサイズマイクロマウスの斜め走行
ハーフサイズマイクロマウスで斜め走行のプログラムまでできました.最短経路情報を元に,スラローム走行によるターンと,左右スラロームが続くときは斜め走行に切り替えるようにプログラムを組みました.幅がぎりぎりなので,斜めに進入するときはいったん余計に回って少し戻し,斜めから直線に戻るときはいったん逆に振ってから戻るようしました.しかし,斜め走行で壁にぶつからないようにするには厳密な姿勢制御が必要で,今のいい加減な姿勢制御では,壁にぶつかってしまいます...斜め走行のパラメータ調整中の画面斜め走行調整中の動画.
2008.07.07
コメント(0)
-
ハーフサイズマイクロマウスのスラローム走行
ハーフサイズマイクロマウスでスラローム走行ができました.最短経路情報を元に,スラローム走行を行っています.2種類の速度で走行させてみました.迷路探索と同じ速度でのスラローム走行の動画.最高速度を上げてスラローム走行の動画.高速走行時には,ターンの角度が不正確になっています.速度を上げると同時にターンの角度補正を組み込んでいく必要がありそうです.
2008.07.04
コメント(0)
-
ハーフサイズマウス,求心法
ハーフサイズマイクロマウスで求心法を作りました.迷路スタート地点から対角のゴール地点に近い方向を優先に分岐点で方向を選択します.求心法の動画
2008.07.03
コメント(0)
全33件 (33件中 1-33件目)
1
-
-

- アイフォン・アイポッドの必需品
- スティーブ・ジョブズの死に際に発し…
- (2025-07-14 03:41:24)
-
-
-

- 楽天ブログいろいろ
- 【祝・100記事】3ヶ月で毎日投稿を達…
- (2025-11-24 22:09:06)
-
-
-

- 【楽天市場】☆☆楽天おかいどくお買い…
- 部屋飲み用に「水筒型の電気ケトル」…
- (2025-11-26 11:38:47)
-



