

2008年09月の記事
全21件 (21件中 1-21件目)
1
-

バッテリーで戦力アップ!?
もっとも簡単で危険な,バッテリーの電圧を上げて戦力アップ! できるかな?マウスの車輪を高回転で回すために,電圧を上げてみます.でも,単なるFETスイッチを使った駆動回路なので低速での過電流による焼損が心配.ソフト的にパルス駆動をさせてみますがバグったら終わってしまうかも...ほか,バランサーや大容量バッテリーを別の仕事用に購入しました.クラフトるうむ はお気に入りなのでここから.楽天なら↓NEXT POWER LiPO 7.4V 1500(タムテックギヤ・イチロクM用)いいものみつけた遊はうす--追記--電圧を上げてマウスを数秒動かしてみました.トルクが上がって振動音が違います.ほか,回路に異常は見られません.プログラムの改良だけで,何割か直線速度を上げられできそうです.
2008.09.30
コメント(1)
-

ちょろ丸納品されました.
ちょろ丸が納品されました.私は作っても良かったのですが,もう一人の使う人はキットじゃなく完成品が欲しい,とのことで,割増料金で完成品をお願いしました.調整済み,調整パラメータ付きなので,ソフト系の演習の教材用にはありがたいです.サンプルプログラムも一通り目を通しました.(私なんかじゃ書けない)すっきりまとまったプログラムで,読みながらじっくり解説するだけで基本が学べる良い教材だと思います.ちょろ丸のページ
2008.09.29
コメント(0)
-
AKI-7125動かしてみました.
AKI-7125マイコンボードを動かしてみました.サンプルプログラムをHEWでコンパイルし,FDTで書き込み.マニュアルに書かれているツールのバージョンが最新ではなかったので少し違いがありましたがだいたい同じようにやればすんなり動きました.適当にプログラムを書き換えていくつかプログラムを作ってみて,今日はおわり.別に急ぎの仕事がありますので.SH7125Fベースボードキット
2008.09.29
コメント(0)
-

次は・・・
マイクロマウス全国大会に申し込みました.海外であるロボコン用の部品注文しました.マイクロマウス中部地区大会も参加のつもりで日程調整してます.あと,昨日・今日は,秋月のAKI-7125Fのマイコンボードとベースボートの回路図を眺めてます.AKI-7125FのサンプルとSH-2マイコンの本を読んでいます.ちょっと前にインストールしたHEWを操作してみました.Pi:Coのサンプルプログラムを読み始めました.それから,ジャンク屋で買った小さなDCモータとエンコーダとギヤをあれこれ並べてみてます.もうすぐ学校が始まりますので,学校業務,授業準備をしないといけないのですが・・・C言語によるSHー2マイコンプログラミング入門お手軽価格です↓12パルスエンコーダ付DCモータ(RDO-29BMA)
2008.09.27
コメント(0)
-
mini-CNC BLACK 1510
またもや,注文しちゃいました.オリジナルマインドのmini-CNC BLACK 1510http://www.originalmind.co.jp/cargo5/black/小型の物なら作れる工具が一通りそろった感じです.もうお金ありません.あとは小物しか買えません...
2008.09.25
コメント(0)
-

業務命令!!
マイクロマウスを作って遊んでいたら,あいつはロボット作れるらしいから,と勘違いされて業務命令が来ました.お付き合いで,海外で開催される自律型のロボット競技大会に出ろ! だそうです.あんまり気が進まないですが,とりあえず考え始めました.ペットボトルくらいの円柱を自律で動いて持ってこないといけないルールです.で,朝2時間くらいで作ってみたのがこれ↓ペットボトルに近づいて...がっちりホールド.意外と簡単にできて,結構マージンあります.あと,足回りはマウスに使ったのより大きなステッピングモータを注文中.納品されたら,足回りに取り掛かります.プログラムは,マウスのプログラムをかなり使いまわせそうなルールです.--追記--日本からもう1チーム参加するらしいですが,検索したら第一線のロボット専門家の先生率いるチームらしいです.1年前に趣味の電子工作を復活した自分なんかでいいですか? って感じです.きっとすごいの作ってるはず・・・
2008.09.25
コメント(0)
-
ちょろ丸
組込みプログラムの入門的な講座を数時間担当することになり,株式会社アールティさんのちょろ丸を注文しました.以前,お店で説明書も一通り見せて頂いて,入門には良さそうです.納品されたら,また報告します.ちょろ丸のページ
2008.09.22
コメント(0)
-
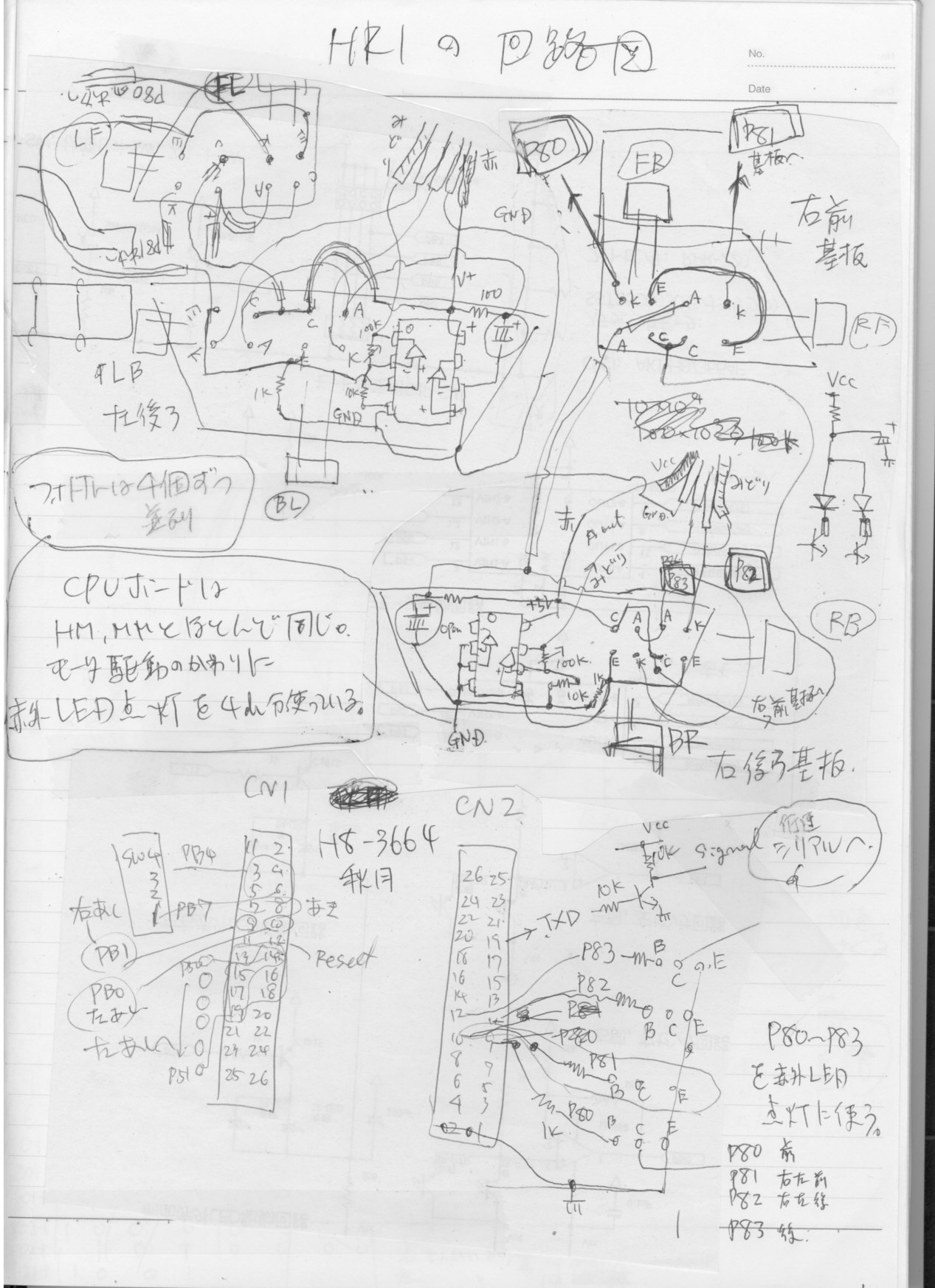
KHR-1HV自律化回路公開
大げさに書くほどのことではないですが,ネタが無いのでアップします.時間がたつと自分でも読めないくらい汚い手書きでごめんなさい.しかも,適当な裏紙に書き出して,後でノートに切り貼りしてます.詳細はこちら↓H8TinyでKHR-1HV制御KHR-1HVの自律化KHR-1HVでマイクロマウスホームへ
2008.09.19
コメント(0)
-
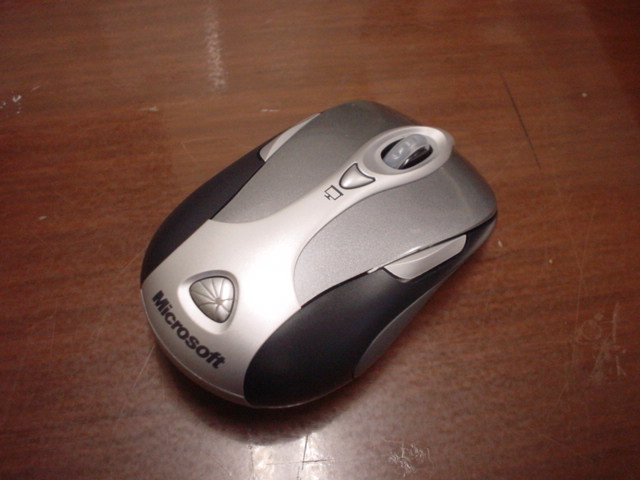
マイクロソフトのマウス
マイクロソフトのマウスです.これいいでしょ,って同僚が見せに来ました.裏返すとなんだかこてこてしてます.おおっー!! レーザービームでました.これらしいです↓Bluetooth対応のプレゼンター機能付きレーザー方式 5ボタンワイヤレスマウス【送料無料】マイクロソフト Wireless Notebook Presenter Mouse 8000 9DR-00003
2008.09.18
コメント(0)
-
ハーフサイズマイクロマウスプレ競技参加者募集
ハーフサイズマイクロマウスプレ競技の参加者募集が始まりました.以下のURLです.http://www.robomedia.org/micromouse2008/competition.htmlしかし一つ困ったことが・・・予選は16×16区画の迷路なのですが,決勝は32区画(15分5回ルール)となっています.単純に考えて,内部RAMを2KBとしか持っていないH8-3664では,迷路マップと最短経路計算用をバイト単位で持ってもメモリーオーバーです.しかも,歩数計算で,1バイトで255歩までしか数えられないので,32×32で1024歩まで数える可能性があることを考えたらこれまた問題ありです.大会は予選のみ参加で,本選に残っても棄権するか?さて,どうしましょ.--追記--良く考えたら,SH7125はRAM8KBでした.こちらならなんとかなりそうです.でも入門用にH8Tinyは捨てがたいのですが...
2008.09.17
コメント(2)
-
マイクロマウス九州地区大会終了
マイクロマウス九州地区大会,無事終了いたしました.遠方よりご参加いただきました方々にお礼申し上げます.九州内からも多数のご参加,ご見学を頂きました.ありがとうございました.来年度の開催時にも皆様にお会いできますれば幸いです.まずは私が都合をつけて他の地方大会,全国大会にも参加させて頂くつもりです.私のマウスは運よく完走でき,支部長賞を頂きました.帰りの探索で壁にひっかかり,マップを壊してしまって最短走行ができなかったのが心残りです.--追記--ビデオを見て何が悪かったのかを確認しました.ゴール内で1周したときゴールの赤外線センサの散乱光を感知して,距離補正を欠けて軌道が斜めにずれ,正面の壁に斜めに侵入して走行不能になると同時に横壁を作ってしまったようです.ゴールが壁に閉ざされてしまって最短経路が求められなかった,ということのようです.そう思ってみると,作ったプログラムどおりに動作して壁に当たってます.つまり,センサの設計があまく,それを考慮したプログラム作成がなされていなかったということ.ロボットは作られた通りにしか動きませんね.--動画を追記--完走したけどゴール内でぶつかってしまった自分のマウス次は完走させるぞ!2足の迷路探索ロボット
2008.09.14
コメント(2)
-
動画を2本.
どこをどうすればよいかはわかっているのですが,時間切れ.ステッパーマウスは,運がよければ完走レベル.KHR-1HVは,リタイヤ狙い.明日の午前中の調整しだいで少しは改善されるでしょうが,どちらも中途半端です.主催者側なのであまり時間が取れそうも無いです.とりあえず動画アップ.簡単な迷路でうまくいったときのマウスKHR-1HVで迷路歩行
2008.09.13
コメント(0)
-
KHR-1HV直りました.
別の用途で一つだけ買ってあったサーボを組み込んだら,壊れた足が治りました.基板はいかれてなかったらしく,一安心.明日に向けて最後の調整ですが,なれないモーション作成は難しく,完走は無理っぽいです.--追記--本番の迷路で動かしたところ,かなり滑ります.調整用迷路とは滑り具合がぜんぜん違っていて,基本の90度ターンができません.今晩再度調整してみますが,最悪ターンが入るところまで歩いて転倒でリタイヤ...
2008.09.13
コメント(2)
-

第18回マイクロマウス九州地区大会ご参加,ご見学ください.
明後日9/14 13:00より,熊本電波高専くぬぎ会館にて第18回マイクロマウス九州地区大会を開催いたします.多数のご参加(当日参加OK),ご見学を頂けますよう会場にてお待ちしております.会場設営しました↓中央が競技用迷路,右手奥がデモンストレーション用のハーフサイズ迷路です.会場は調整用の電源と無線LANが使える予定です.
2008.09.12
コメント(0)
-
ショック!!
KHR-1HVのサーボが壊れたようです.動作が不安定になり,両足が接触しているのでおかしいと思ったら,左足を外に開くサーボが壊れていました.心当たりといえば,倒れそうになって体を支えた時くらい.その程度で壊れるのはおかしいですが,前から何かダメージがあったのかも.あとちょっとで一通りモーション手直しが終わるところだったのですが,大会出場は難しくなりました...
2008.09.11
コメント(0)
-
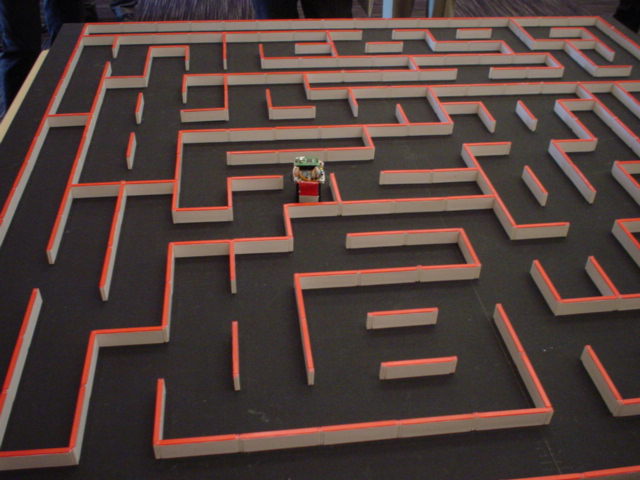
ハーフサイズのフル迷路走行
注文していた16×16のフル迷路がやっと到着しました.簡単な迷路を作って走らせてみるとうまく完走できました.難易度の高い迷路では壁に引っかかってしまいますが,難易度の低い迷路なら運がよければ完走できました.センサやプログラムをもう少し調整すれば完走率が上がりそうです.ハーフサイズマウスでフル迷路を走る動画
2008.09.11
コメント(0)
-
マイクロマウスのプログラムが一通りできました.
ノーマルサイズのマイクロマウスのプログラムがやっと一通りできました.スピード可変は思ったより簡単にできました.そこそこ高速化できました.直線走行とターンのルーチンの最初でそれぞれの最高速度を読み込み,最高速度の違いを補正する処理をモータの加減速処理の中にいれました.壁の切れ目での位置補正.これが無いと大きな迷路ではだめなはずです.直線が続いて誤差が蓄積しても,途中途中にある壁の切れ目を使って位置補正します.壁の切れ目と壁の始まりのどちらでも補正できるようにしました.斜め走行の衝突回避を作りました.あとは大きな迷路で調整すれば,運がよければ完走できるかも,というところ.これ以上精度を上げるには,速度を落とすか,ハードを作り直すか,プログラムの大幅な改編をするかです.九州大会はこれで行きます.動画は大会後にupの予定.
2008.09.09
コメント(0)
-
大会まであとわずか
タイヤのスリップに悩まされながら,プログラムを組んでいます.やっと分かったことは,同じターンのパラメータで最速値だけを変えてもダメ.ターンのパラメータと最速値は別個に制御しないとターンに狂いがでるのが避けられません.低速で完走を狙うか,プログラムを複雑にしてスピードを上げるか.教材用に使うことを考えると,あまり複雑な構造にしたくないのですが...
2008.09.08
コメント(0)
-
あれこれ手を出しすぎて...
ハーフサイズ,ノーマルサイズ,ヒューマノイド型のマウスを一度に作って,どれも中途半端な状態です.来週中には調整をしてまともに走るマウスを大会に出せるようにしたいですが,時間的拘束の多い仕事が来週入っていてどうなることやら...
2008.09.04
コメント(0)
-

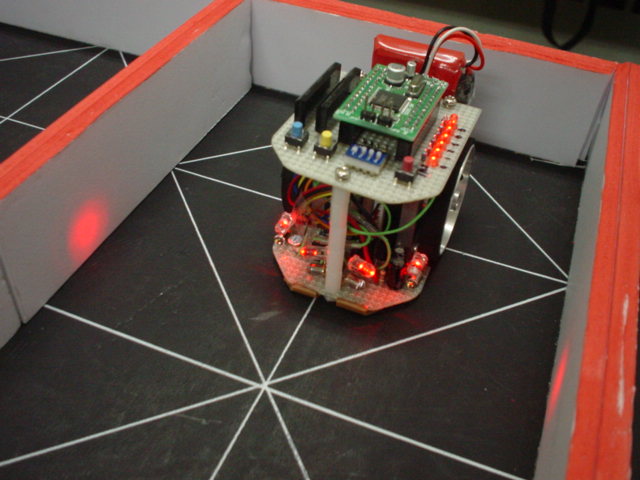
Pi:Coと並べてみました.
自作のハーフサイズマウスと製品のPi:Coを並べてみました.体積も高さも重さも約1.5倍,車幅だけは狭いです.
2008.09.04
コメント(0)
-

ハーフサイズマウスでノーマル迷路走行
ハーフサイズマウスでノーマルサイズ調整用迷路を走ってみました.1区画のカウント数と前左右の標準のセンサ値のみ書き換えただけですが,ちゃんと走ってくれました.しかし,まれに前壁を見損ない,スラロームをさせるとおかしな動きをします.原因が分かりませんが,プログラムを読み直して調整すればとりあえず走れると思います.ハーフサイズマウスでノーマルサイズ調整用迷路を走る動画--追記--昨夜,プログラムを読み直したら原因が分かりました.半区画前まで来たところで前壁の有無を検知するのですが,そのしきい値が悪くて前壁を見逃していたようです.ハーフサイズ用に作ったセンサ回路なので,長距離での感度が悪く,条件が厳しい(白熱電球で照明されたりすると)場合は多分走行不能です.スラロームは,1区画のステップ数×0.何倍でスラローム中の走行距離を決めていたので,ステップ数を変えると同時にそこも書き換えないといけませんでした.
2008.09.01
コメント(0)
全21件 (21件中 1-21件目)
1
-
-

- いいもの見つけたよ
- [楽天市場]「ヒーター」「ポータブ…
- (2025-11-25 18:19:59)
-
-
-

- 新製品発売情報・予約情報
- 喜怒哀楽by増田貴久
- (2025-02-14 15:21:13)
-
-
-

- 【楽天市場】☆☆楽天おかいどくお買い…
- 部屋飲み用に「水筒型の電気ケトル」…
- (2025-11-26 11:38:47)
-



